开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
此步骤主要用来计算两点之间的高度差。
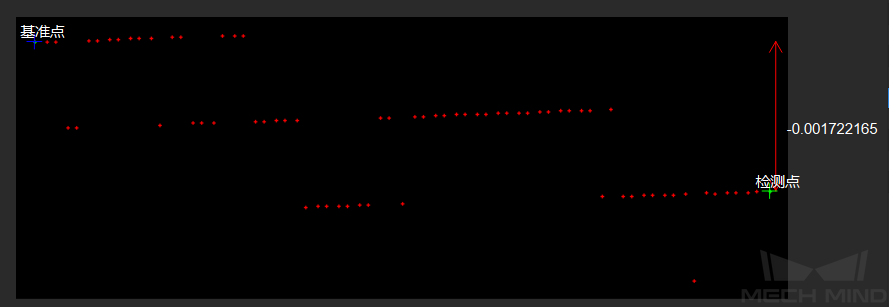
此外,由用户自定义的两点之间将自动生成一条连线,视图插件中将显示此条连线的高度变化。
在开始了解此步骤之前,请先查阅 开始使用测量模式 中的内容。
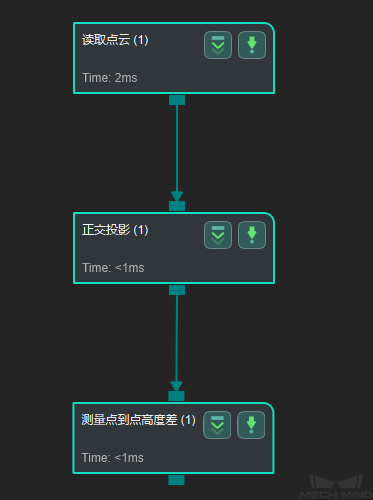
组合 读取点云 、 正交投影 、测量点到点高度差 三个步骤,来完成 点 到 点 的高度差测量。
单击 正交投影 ,在 步骤输入端口选择 窗口, 将 “输入1(带法向点云)” 的下拉栏设置为 “读取点云_1_带法向点云” 。
单击 测量点到点高度差 ,在 步骤输入端口选择 窗口 ,将 “输入1(可视化背景)” 的下拉栏设置为 “正交投影_1_深度图”。
读取点云 设置:
单击此步骤,在 步骤参数 窗口中设置待测量物体的点云文件路径等参数(用户需准备待测量物体的点云)。完成设置后,单击 运行 来运行工程。
测量点到点高度差 设置:
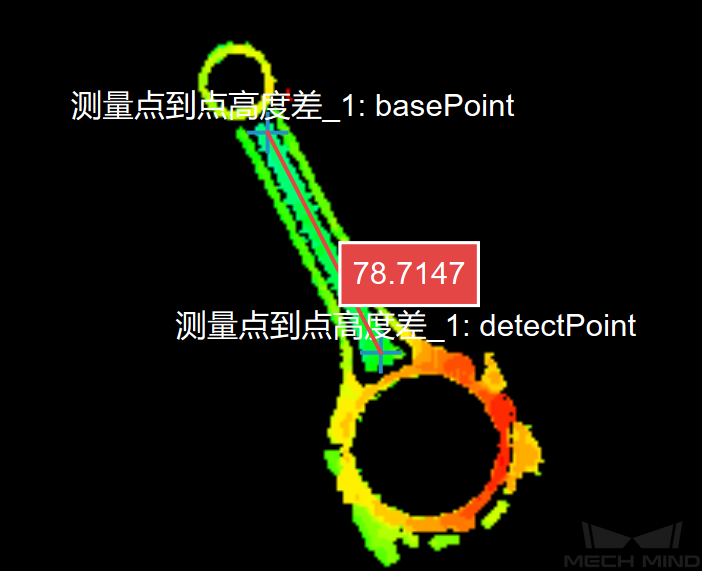
一点为基准点,另一点为检测点,两点初始位置位于画板图像的左上角。移动两点到自定义位置,如下图: 在 步骤参数 窗口中,可以微调基准点与检测点的位置,如下图:
一点为基准点,另一点为检测点,两点初始位置位于画板图像的左上角。移动两点到自定义位置,如下图:
在 步骤参数 窗口中,可以微调基准点与检测点的位置,如下图:
画板上显示两点之间的距离。在 测量结果输出 窗口,显示两点之间的高度差(像素单位),如下图:
在视图插件中将显示两点之间连线的高度变化,如下图:
用户可以在 测量结果输出 窗口,或 结果视图 中设置上、下限值,来查看测量值是否合格。