开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
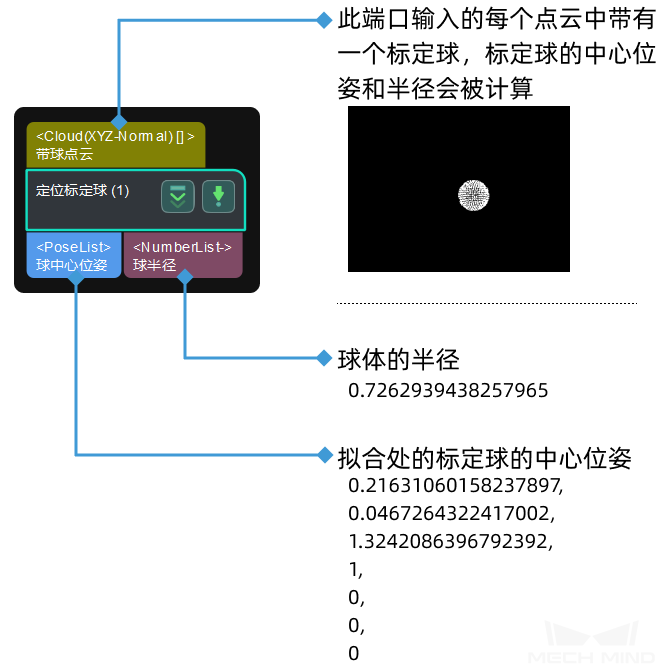
本步骤用于在每个输入的点云中拟合出一个球体(标定球),并输出每个标定球的中心位姿及半径。
本步骤用于在测量场景中,通过定位场景中的标定球,来补偿相机及机器人的温漂。
无参数。