常规匹配方案的 Mech-Vision 工程搭建总结¶
常规匹配方案主要分为两类:纯匹配方案、深度学习+匹配方案,两者的差别在于匹配前点云区域选取的方式。
纯匹配方案的点云区域选择通常是根据点云处理选取。
深度学习+匹配方案的点云区域选择是基于深度学习识别的Mask选取的。
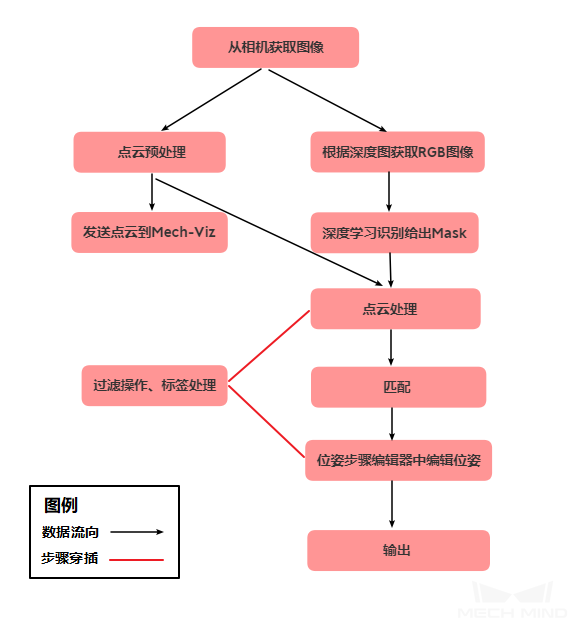
如上图所示,常规匹配方案的 Mech-Vision 工程结构由以下部分组成:
从相机获取图像 :获取相机的数据。包括彩色图像(RGB)、深度图像(Depth),根据实际情况选择或填写对应相机属性即可。
点云预处理 :将深度图转换为点云并计算点云法向量,提取感兴趣区域内滤波后的点云。
发送点云到外部服务 :将深度图转换成的点云(XYZ-RGB)传输到 Mech-Viz 软件进行可视化。
点云处理:处理优化点云,使点云能够符合匹配的需求。
位姿步骤编辑器 中编辑位姿:匹配的输出结果无法直接给到 Mech-Viz 进行作业,需要进行一些处理,如坐标系变换,位姿调整和位姿排序等,通过 位姿步骤编辑器 可快速的对位姿进行编辑。
输出 :将 Mech-Vision 的结果输出到 Mech-Viz。