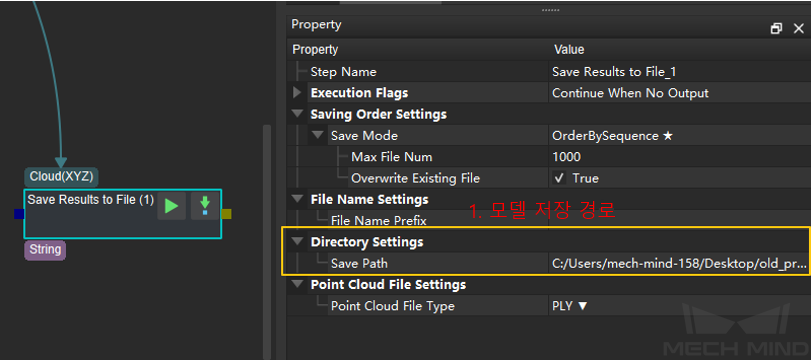
티치 펜더트를 통해 획득한 픽 포인트를 추가하기¶
응용 시나리오¶
정밀도 요구가 높으며 최종 피킹 정밀도는 0.5mm 이내로 유지해야 합니다.
클램프 TCP를 정확하게 측정하기 어렵습니다.
부품의 전송된 포즈가 상대적으로 일치하고 일치하지 않은 경우 다중 모델을 사용해야 합니다.
작업 프로세스¶
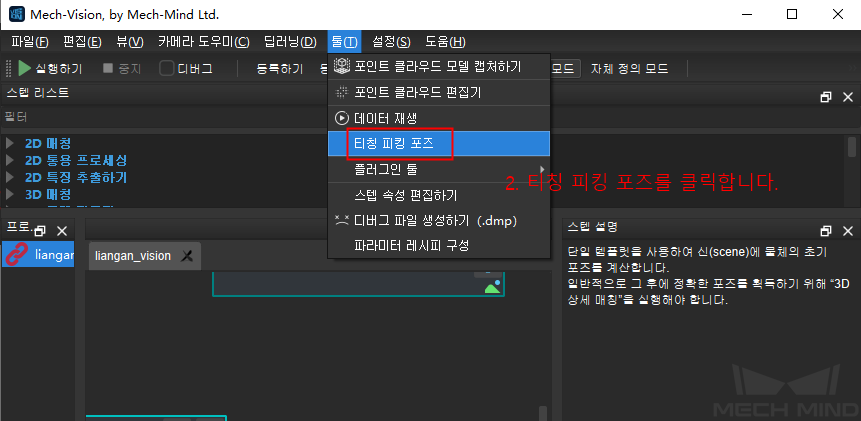
Vision->툴킷->티치 펜더트를 통해 획득한 픽 포인트를 추가하기¶
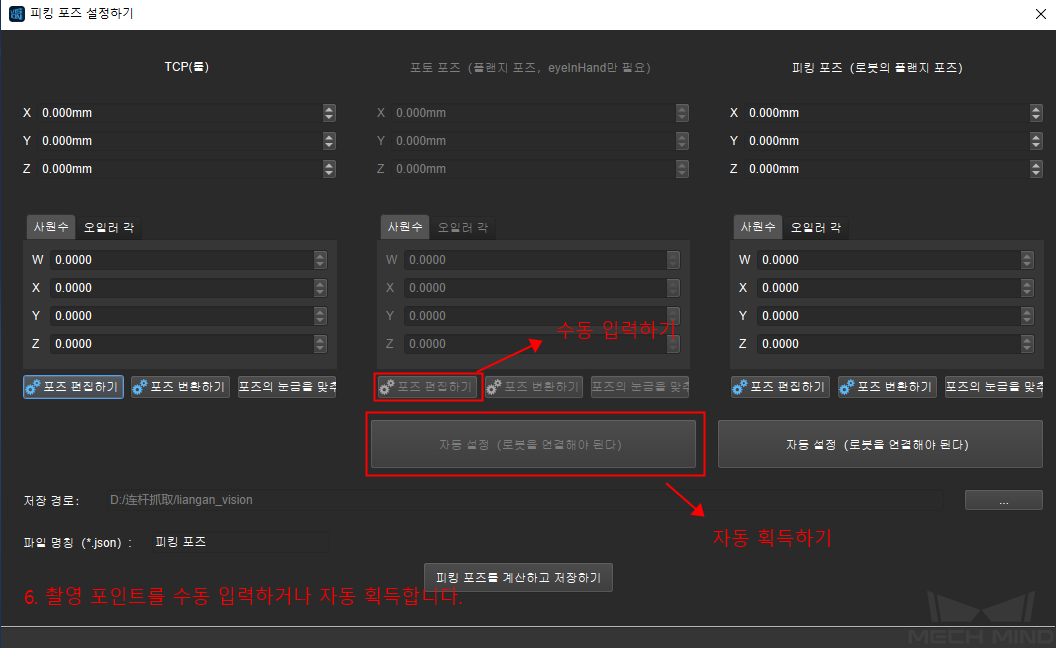
캡처 포즈를 설정하기 (Eye In Hand 방식에만 필요하며 Eye To Hand 방식에 이 스텝을 실행하지 않습니다)¶
캡처 위치를 자동으로 설정하기: 로봇을 연결하고 캡처 위치로 이동시킨 다음 촬영 포인트 설정하기 를 클릭해서 로봇 플랜지 좌표를 캡처 위치로 자동으로 획득합니다.
캡처 위치를 수동으로 설정하기: 로봇을 연결하고 캡처 위치로 이동시킨 다음 플랜지 중심 포즈를 수동으로 입력하며 캡처 위치로 취급합니다.
주의
캡처 위치를 설정할 때 수동으로 입력한다면 픽 포인트도 수동으로 입력해야 합니다.
TCP가 아닌 반드시 플랜지 중심 포즈를 입력해야 합니다.
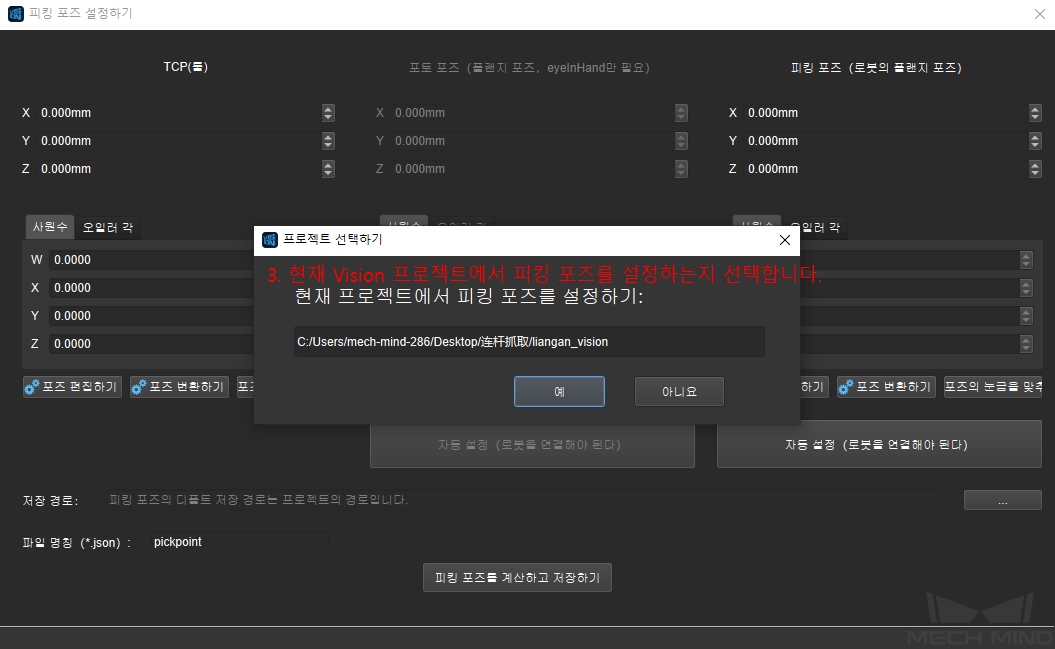
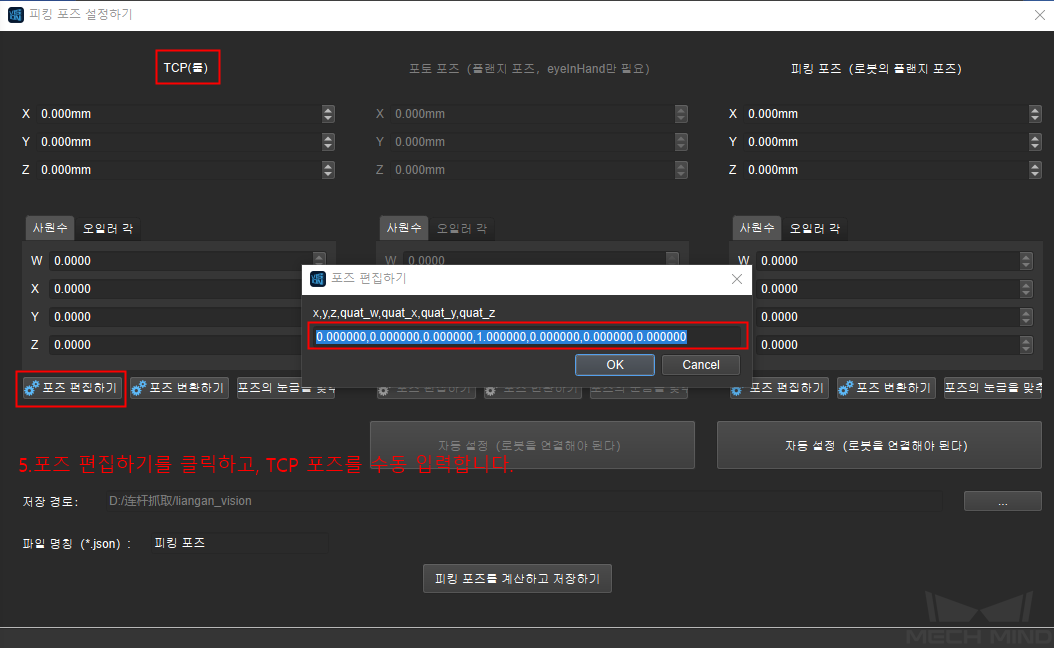
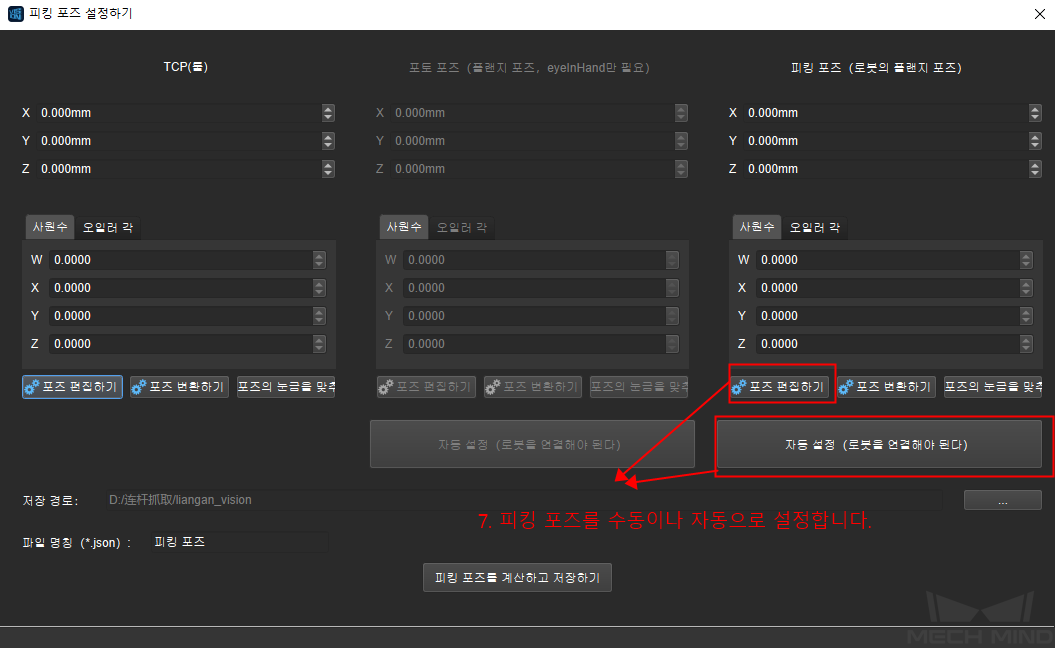
픽 포인트를 설정하기¶
픽 포인트를 자동으로 설정하기: 로봇을 연결하고 로봇을 픽 포인트로 이동시킨 다음 대상 물체를 잡고 픽 포인트를 설정하기 를 클릭합니다.
픽 포인트를 수동으로 설정하기: 로봇을 연결하고 로봇을 픽 포인트로 이동시킨 다음 대상 물체를 잡고 로봇 플랜지 중심 포즈를 수동으로 입력합니다.
주의
픽 포인트와 촬영 포인트가 같은 좌표계에 있도록 하기 위해 클램프는 픽 포인트가 물체를 잡고 놓는 전후에 물체의 위치와 포즈를 변하지 않기를 반드시 확보해야 합니다. 대상 물체를 잡고 놓기를 반복하여 안정시킨 다음 픽 포인트를 설정합니다.
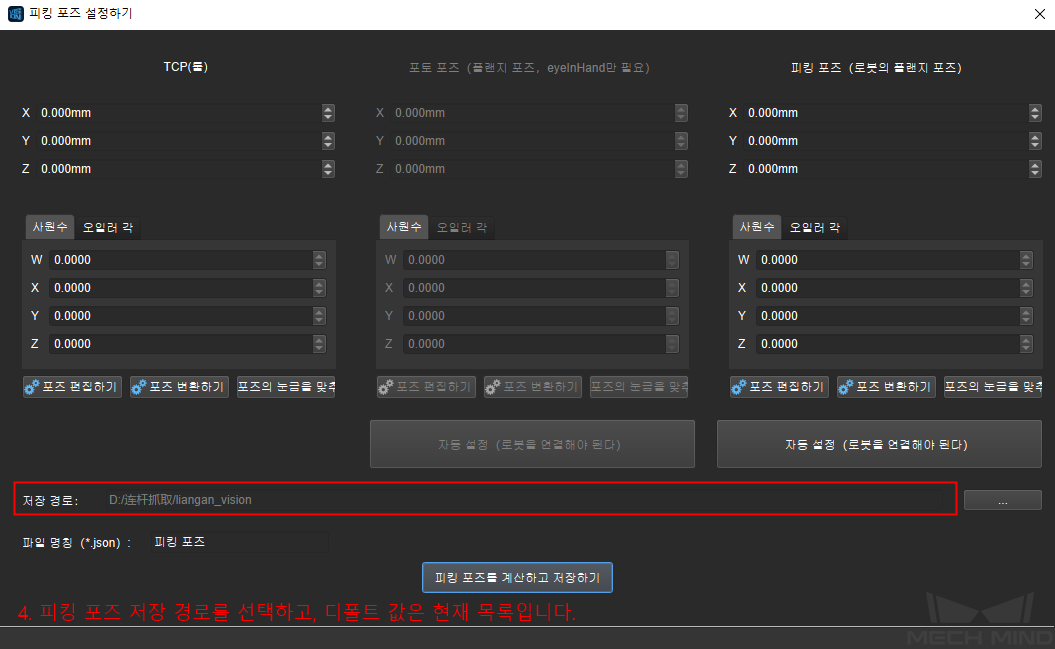
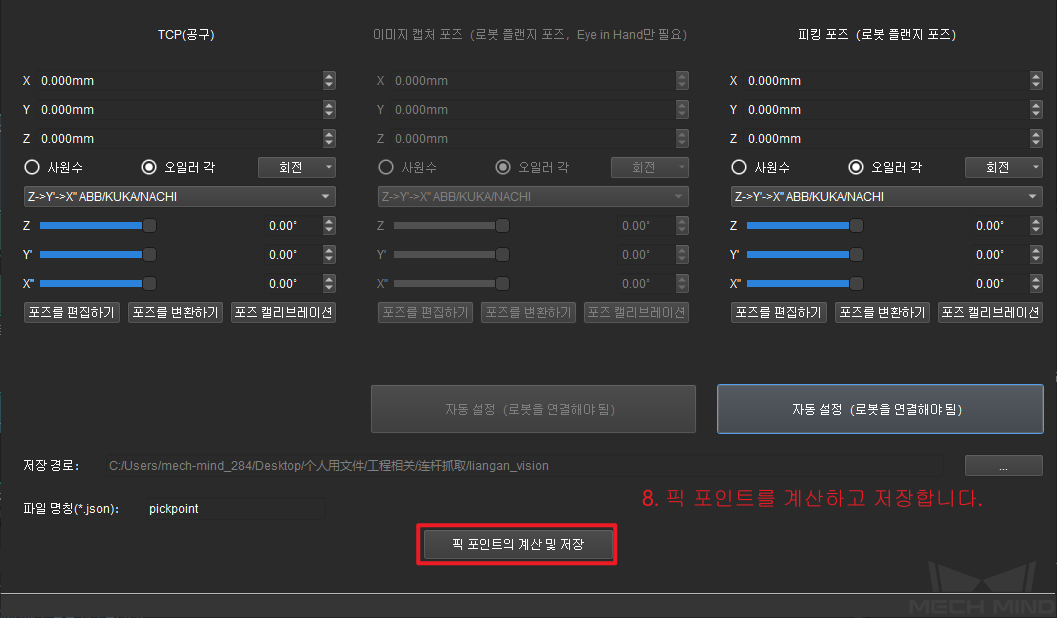
“픽 포인트의 계산 및 저장”를 클릭하기 (픽 포인트가 설정한 저장 경로에 저장됩니다)¶
주의
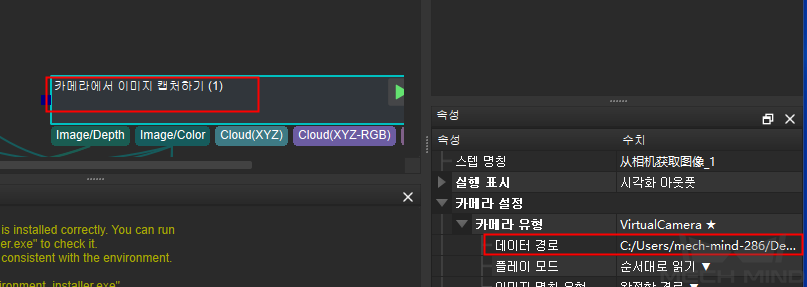
대상 물체가 큰 경우 듀얼 카메라로 이미지를 맞춰야 하는데 아래와 같은 두 스텝을 동시에 실행할 수 있습니다. 첫 번째는 서브 카메라에서 이미지를 획득하고 두 번째는 메인 카메라에서 이미지를 획득합니다. Mech-Vision 프로젝트를 실행한 다음 위와 같은 픽 포인트를 설정하는 스텝을 실행할 수 있습니다.
픽 포인트 설정의 정확도를 체크하기¶
방법 1 (최우선 선택)¶
모델의 컬러 맵과 뎁스맵을 카메라에서 이미지를 획득하는 입력 데이터로 사용합니다.
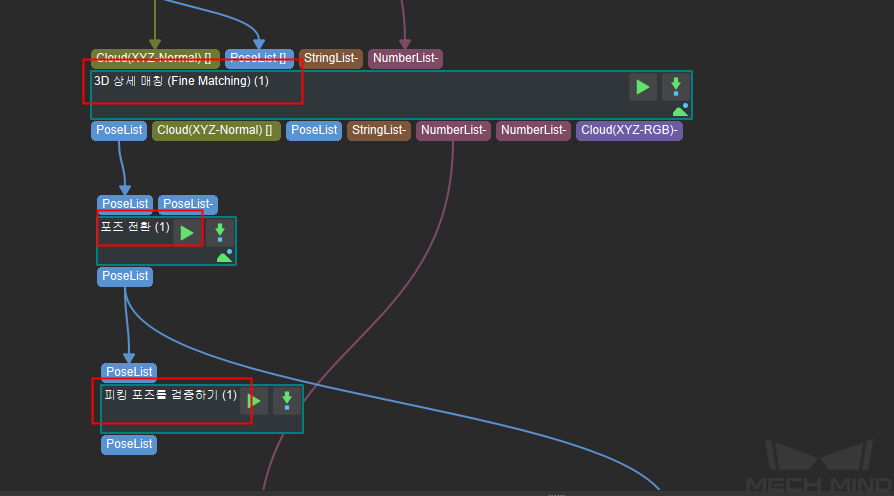
작성한 모델과 설정한 픽 포인트에 3D 근사 매칭과 3D 상세 매칭을 입력합니다.

Mech-Vision 프로젝트 포즈가 변한 후에 검증 픽 포인트를 연결하면 모델 자체 매칭 시나리오 포인트 클라우드의 검증 환경을 구축합니다.
주의
이 과정에서 대상 물체의 위치가 변하지 않기를 확보해야 합니다.
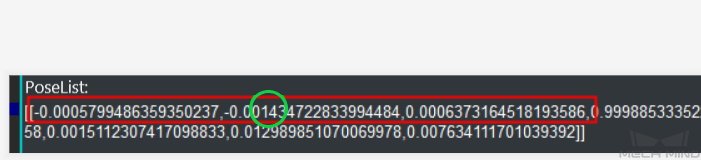
스텝 “검증 피킹 포즈”가 출력된 포즈의 구체적인 의미는 피킹 포즈를 설정할 때 피킹 포즈의 포즈와 Mech-Vision 프로젝트 시뮬레이션을 할 때 출력된 피킹 포즈의 차이입니다. 이 스텝을 실행할 때 TextOutput를 True로 선택하고 Text 출력을 지켜봅니다. 아래의 그림과 같이 마지막의 픽 포인트 Y 방향의 차이는 1.4mm이며 오차가 큰 편입니다.
주의
3D 상세 매칭 의 아주 작은 오차를 확보해야 합니다. 아니면 스텝 검증 피킹 포즈의 출력 오차는 매칭과 픽 포인트의 더블 오차가 될 것입니다.
방법 2¶
새로운 작성한 템플릿과 픽 포인트를 로드하고 Mech-Vision 프로젝트를 실행합니다. Mech-Viz로 로봇암을 제어하여 캘리브레이션한 대상 물체를 피킹하도록 합니다. 정확하게 피킹한다면 설정한 픽 포인트가 정확하다는 의미입니다.
주의
픽 포인트의 설정에 문제가 있으면 의외로 충돌이 발생할 수 있으니 이 방법을 사용할 때 조심스럽게 로봇암을 조작해야 합니다.