카메라 뷰어¶
카메라 뷰어 설명¶
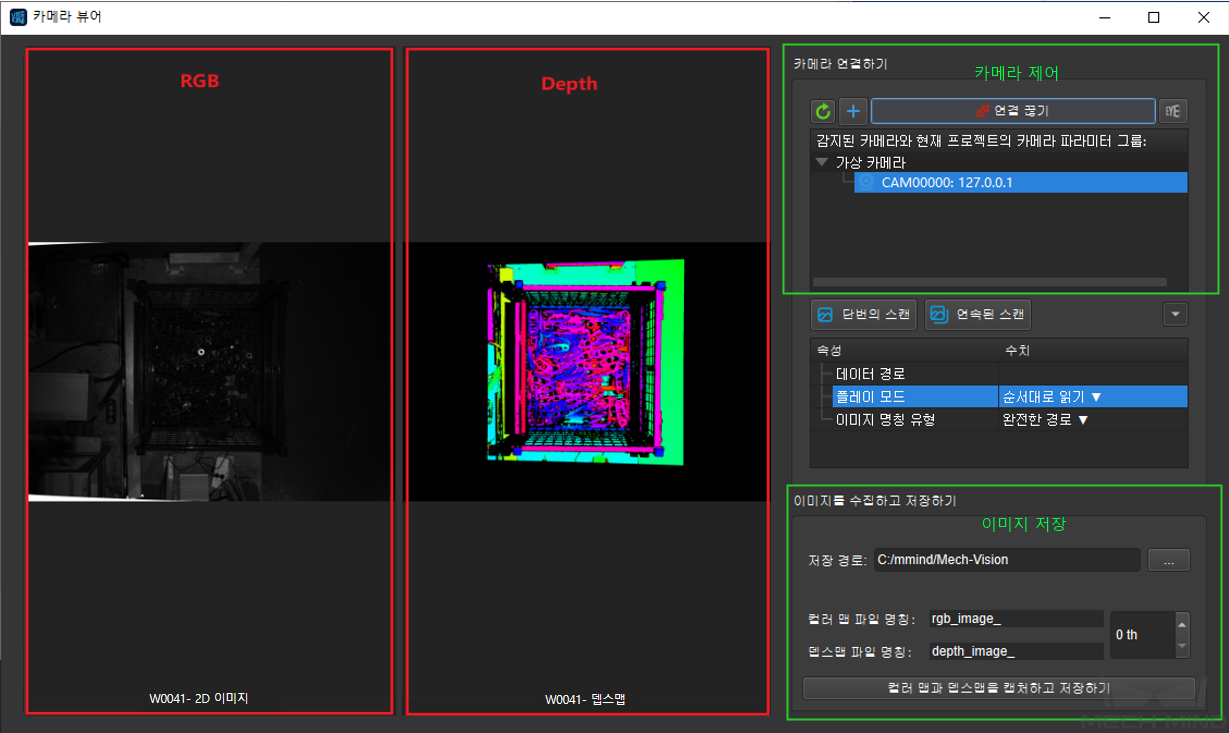
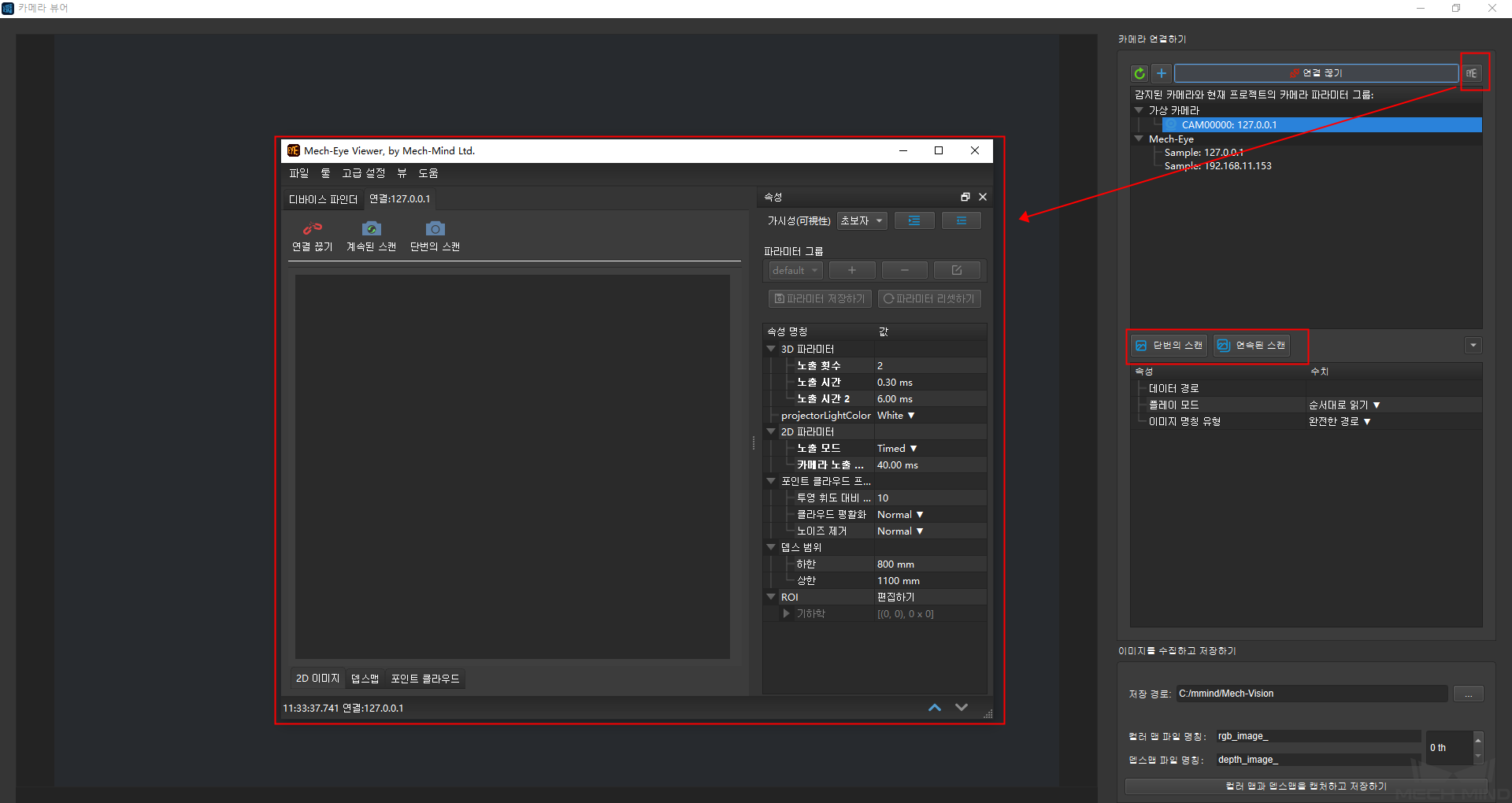
카메라 뷰어는 카메라를 연결하고 촬영 기능을 제어할 수 있으며 카메라의 속성을 설정할 수 있고 컬러 맵과 뎁스맵을 표시할 수 있습니다. 저장 경로를 지정해서 이미지를 저장할 수 있습니다. 카메라 뷰어 각 부분의 기능 소개는 아래 그림과 같습니다.
카메라 뷰어 실행 스텝¶
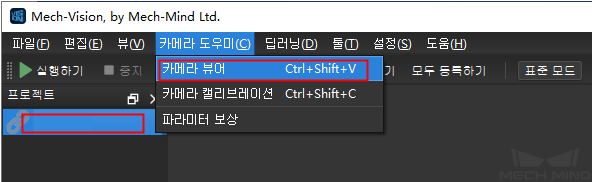
1.Mech-Vision에서 프로젝트를 열고, 를 통해 “카메라 뷰어”로 이동합니다.
2.카메라 파라미터를 로드합니다.
주의
카메라가 촬영할 때 해당 내부, 외부 파라미터를 로드해야 하고 내부, 외부 파라미터는 해당 프로젝트 목록에서 저장하기 때문에 해당 프로젝트 목록을 로드하면 됩니다; 아무런 목록을 로드하지 않고 카메라 뷰어에 들어갈 수도 있습니다.
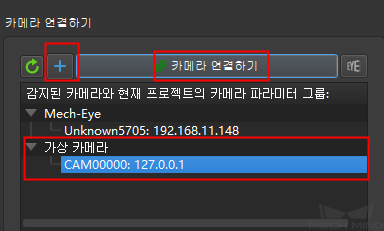
3.카메라 파라미터 시뮬레이션을 사용할 경우, VirtualCamera를 선택하고, 카메라 연결 표시즐에서 + 를 클릭하고 가상 카메라를 만듭니다. “CAM0000:127.0.0.1”을 선택한 후 카메라 연결 을 클릭합니다.
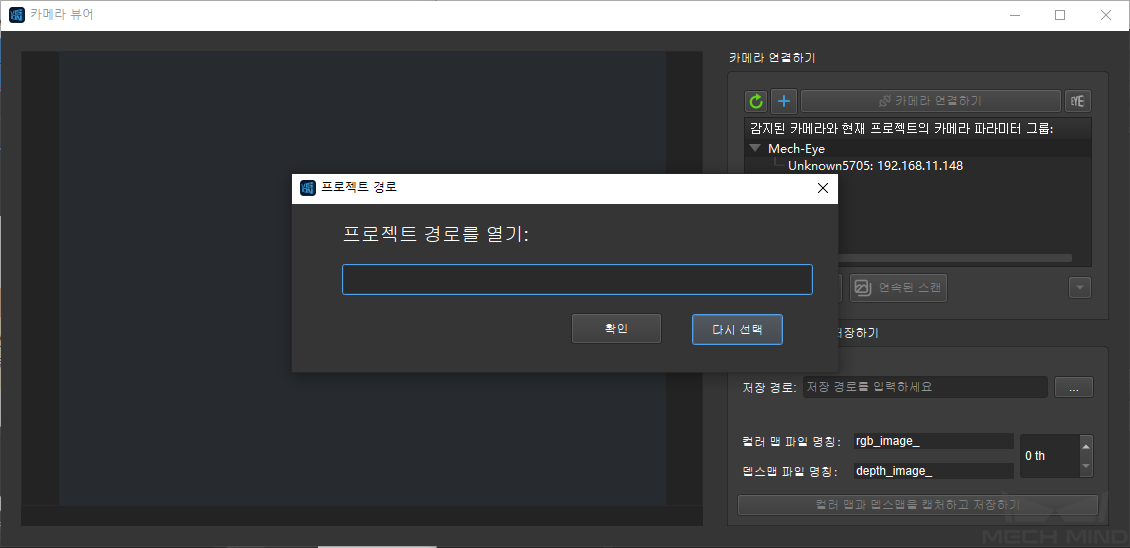
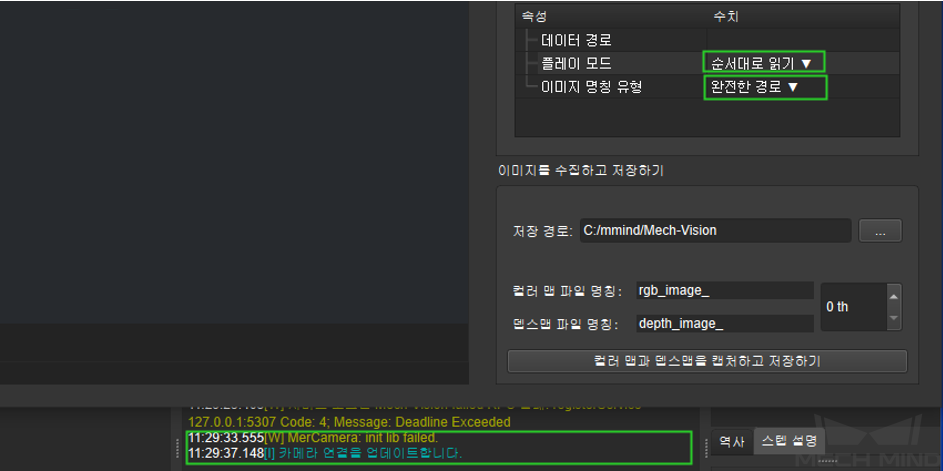
가상 카메라를 사용하면 이미지 데이터 경로를 선택해야 합니다. 선택한 이미지 데이터 경로가 정확한 경우, 로그 창에서 내부, 외부 파라미터 로드가 완료되고 카메라 설정이 업데이트되면 정상적으로 이미지를 캡처할 수 있습니다. 또한 이미지의 플레이 모드 (순서대로 읽기, 싱글 반복, 모든 반복, 랜덤 읽기) 및 입력된 이미지 명칭 유형 (완전한 경로, 파일 명칭, 기본 명칭)을 변경할 수 있습니다.
이미지 데이터 경로를 선택할 때, 선택된 폴더에 뎁스맵, 컬러 맵, 카메라 파라미터, 플랜지 포즈 파일이 고정 형식으로 저장되지 않은 경우, “가상 카메라 도우미”를 촉발하고 이미지 데이터를 선택합니다. 구체적인 사용 방법은 카메라에서 이미지를 캡처하기 를 참고하고 설정한 후 정상적으로 이미지를 캡처할 수 있습니다.
4.실제 카메라를 사용하는 경우 단번 캡처 혹은 연속 캡처 를 클릭하여 컬러맵과 뎁스 맵을 획득합니다. 또한 인터페이스 오른쪽 상단에 있는 Mech-Eye Viewer 를 클릭하여 Mech-Eye Viewer 소프트웨어를 켜고 더 상세한 설정을 할 수 있습니다. Mech-Eye Viewer의 사용 방법은 Mech-Eye Viewer사용 를 참고하세요.
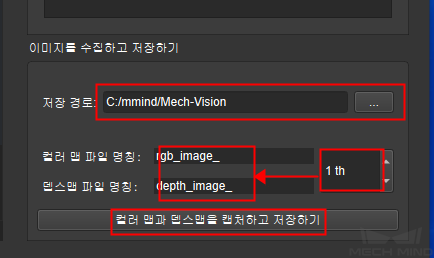
5.이미지 저장 경로 및 컬러 맵, 뎁스맵 파일 명칭 번호를 설정하고 컬러 맵과 뎁스맵을 캡처하고 저장하기 를 클릭하고 스텝이 완료됩니다.