카메라에서 이미지를 캡처하기¶
기능 설명¶
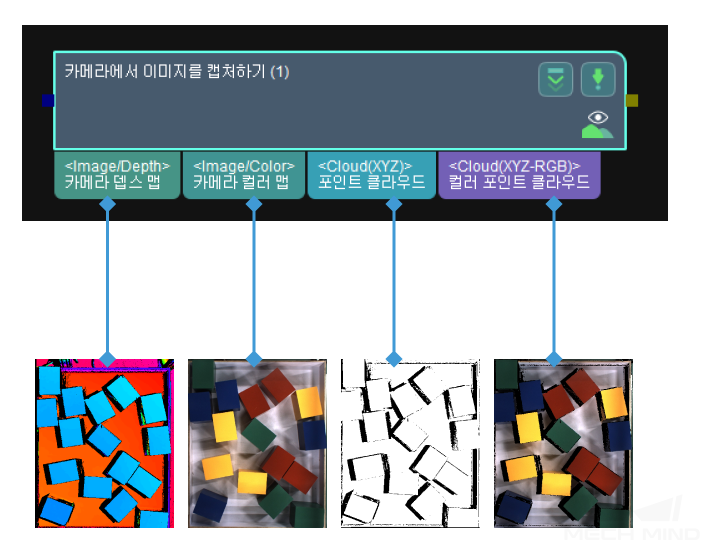
실제 혹은 가상 카메라를 통해 컬러 맵, 뎁스 맵과 포인트 클라우드를 획득합니다.
응용 시나리오¶
일반적으로 비전 프로젝트의 시작 입력으로 Mech-Eye 산업용 3D 카메라 혹은 제3자 카메라를 통해 데이터를 캡처하거나 가상 카메라의 시뮬레이션 데이터 소스를 사용합니다.
입력 및 출력¶
파라미터 조절 설명¶
실제 카메라를 사용하는 경우¶
카메라 유형
- 카메라 유형
- 기본값: Mech-Eye값 리스트: External2D, LMI, Mech-EyeTOF, Mech-Eye설명: 실제 카메라를 연결할 때 대응한 카메라 유형을 선택해야 합니다.
- 카메라 ID
- 기본값:CAM00000설명: 카메라를 선택하기 버튼을 클릭하여 팝업창에서 연결할 카메라와 대응한 파라미터 그룹을 선택하면 해당 카메라의 ID를 자동으로 획득할 수 있습니다.
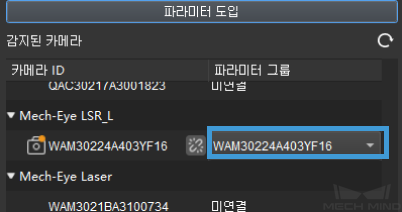
먼저 팝업 창에서 연결할 카메라를 선택한 다음
 를 누르십시오.
를 누르십시오.
그런 다음, 카메라 연결 성공 후
버튼이  으로 바뀌고 파라미터 그룹을 선택하세요 드롭다운 리스트에서 카메라 파라미터 그룹을 선택합니다.
으로 바뀌고 파라미터 그룹을 선택하세요 드롭다운 리스트에서 카메라 파라미터 그룹을 선택합니다.
파라미터 그룹 선택이 완료되면 아래 그림과 같습니다.
마지막으로 카메라가 성공적으로 연결되고 파라미터 그룹이 선택되면 아래 그림과 같이 카메라 ID와 카메라 캘리브레이션 파라미터 그룹이 자동으로 채워집니다.
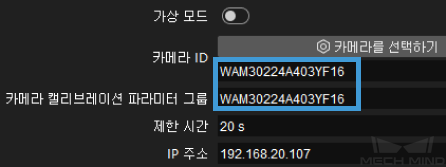
- 카메라 캘리브레이션 파라미터 그룹
- 카메라 ID가 설정된 다음에 위 그림과 같이 자동으로 채워집니다.
- 타임아웃
- 기본값:20s설명: 타임 아웃. 설정된 시간 내에 카메라가 이미지를 캡처하지 못하면 타임 아웃입니다. 이런 경우에 카메라가 이미지 캡처를 다시 시도하고 연속적으로 3차례 실패한다면 이상 알림 메시지가 나타날 것입니다.
- IP 주소
- 기본값:127.0.0.1설명: 카메라의 실제 IP 주소입니다. 카메라가 성공적으로 연결되고 파라미터 그룹이 선택되면 IP 주소가 자동으로 채워집니다.
- 카메라 모델
- 기본값: Unknown설명: 이 스텝은 연결된 카메라에 따라 해당 《카메라 모델》을 자동으로 가져옵니다(이 파라미터는 변경할 수 없습니다).
- 2D 이미지 유형
- 기본값: Internal IR Image값 리스트: Internal IR Image, External Color Image설명: 사용자가 LSR 시리즈 카메라를 사용할 때(현재 LSR 및 DEEP 포함), 사용자는 필요에 따라 "2D 이미지 유형"을 선택할 수 있습니다. 상동 텍스처 맵은 이전 버전의 Laser 카메라와 일치하며 보정할 필요 없이 흑백 2D 맵이며 뎁스 맵과 동일한 좌표계에 있습니다. 외장 컬러 맵은 2D 컬러 카메라로 촬영한 것으로, 이미지를 보정해야 사용할 수 있습니다.
- 뎁스 맵 좌표계로 수정하기
- 기본값: 선택하지 않음설명: 2D 이미지 유형**은 **External Color Image 로 설정할 때 이 옵션이 표시됩니다. 외부 컬러 맵 좌표계를 뎁스 맵 좌표계로 수정하는 데 사용됩니다.
재캡처 횟수
기본값:3추천값:3설명: 스텝을 실행하는 과정에서 이미지를 캡처할 수 있는 최대 횟수입니다. 이미지 캡처를 시도하지만 실제로 이미지를 캡처하지 못하더라도 이 시도 과정은 한번의 캡처로 간주됩니다.
Mech-Center에 있는 로봇 서비스 명칭
기본값: 비어 있음.설명: 입력한 로봇 서비스 명칭은 Mech-Center에서 연결된 로봇 명칭과 일치해야 합니다.
가상 카메라를 사용하는 경우¶
카메라 유형
- 가상 모드
- 기본값: 선택하지 않음설명: 로컬 시뮬레이션 데이터 소스를 사용하려면 이 파라미터를 선택하십시오.
- 카메라 캘리브레이션 파라미터 그룹
- 설명: 데이터 경로 를 선택한 다음에 카메라 캘리브레이션 파라미터 그룹 은 자동으로 입력될 것입니다. 데이터 경로 에 여러 개 카메라 캘리브레이션 파라미터 그룹이 있는 경우 이 옵션의 언더바에서 원하는 파라미터 그룹을 선택할 수 있습니다.
- 데이터 경로
- 설명: 오른쪽에 있는
 버튼을 클릭하여 대상 폴더를 선택하십시오.
버튼을 클릭하여 대상 폴더를 선택하십시오.힌트
데이터 폴더를 선택하는 과정에서 다음과 같은 상황이 발생하면 가상 카메라 도우미 가 트리거되어 사용자가 이미지 데이터를 선택하는 데 도움이 됩니다.
데이터 폴더 경로가 비어 있습니다.
선택한 데이터 폴더에 여러 세트의 데이터가 있습니다.
선택한 데이터 폴더에 컬러 맵 데이터, 뎁스 맵 데이터 또는 내부 및 외부 참조 데이터가 없습니다.
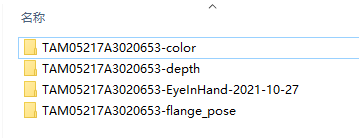
카메라 캘리브레이션 방법이 Eye in Hand일 때 데이터 폴더의 표준 이미지 데이터 형식은 아래 그림과 같습니다.
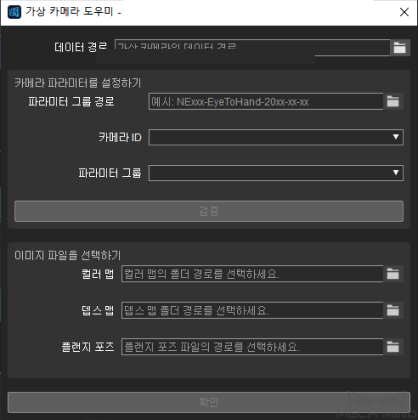
선택한 데이터 폴더 경로가 비어 있는 경우 이 스텝을 수행한 후 팝업한 가상 카메라 도우미 창에서 먼저
 를 클릭하여 데이터 경로를 선택해야 하며 이 창에서 카메라 ID, 파라미터 그룹 내용이 자동으로 채워집니다. 그 다음 검증 을 누르면 카메라 파라미터 그룹이 업데이트되었습니다 라는 문자가 뜹니다 .
를 클릭하여 데이터 경로를 선택해야 하며 이 창에서 카메라 ID, 파라미터 그룹 내용이 자동으로 채워집니다. 그 다음 검증 을 누르면 카메라 파라미터 그룹이 업데이트되었습니다 라는 문자가 뜹니다 .
다음으로,
를 클릭하여 이미지 데이터가 있는 폴더, 즉 컬러 맵, 뎁스 맵 및 플랜지 포즈를 선택해야 합니다. 선택이 완료되면: guilabel: 확인 을 클릭합니다.
마지막으로 팝업한 설정 완료 창에서 확인 을 누르십시오.
카메라 캘리브레이션 방법이 Eye to Hand일 때 데이터 폴더의 표준 이미지 데이터 형식은 아래 그림과 같습니다.
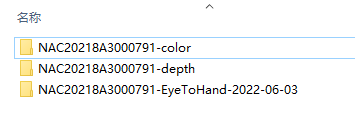
가상 카메라 도우미 인터페이스는 아래 그림과 같으며, Eye to Hand 유형 프로젝트의 데이터 경로 선택 방법은 상기 Eye in Hand 유형 프로젝트의 데이터 경로 선택 방법을 참고하시면 됩니다.
- 재생 모드
- 기본값: Sequential값 리스트: Sequential, Repeat One, Repeat All, Random설명: 실제 수요에 따라 이미지 데이터를 읽는 모드를 선택하십시오.
- 현재 프레임
- 설명: 현재 읽은 그림의 번호와 타임스탬프를 표시하는 데 사용됩니다.
주의
가상 모드에서 데이터 경로 아래의 이미지 데이터가 변경된 경우 데이터 경로를 다시 선택하여 전체 이미지 데이터를 다시 읽으십시오.데이터 디스플레이가 누락된 이유는 이 스텝에서 이미지 데이터를 동적으로 읽을 수 없기 때문입니다.