자주 묻는 질문¶
자주 묻는 질문에 관한 설명¶
자주 묻는 질문은 소프트웨어가 실제 사용되는 데 흔히 나타나는 문제 및 대응하는 해결 방법을 위주로 정리되었습니다.
포인트 클라우드의 누락¶
실제 사용 과정에서 가장 흔히 나타나는 문제는 포인트 클라우드의 누락입니다. 이 문제를 해결하려면 먼저 포인트 클라우드가 생성부터 최종 사용까지의 프로세스 전체에 대해 잘 이해해야 합니다. 이 프로세스는 그림 1.1과 같이 빨간색 부분은 카메라에서 처리되고 노란색 부분은 Mech-Vision에서 진행됩니다. 모든 Step이 포인트 클라우드의 누락을 초래할 수 있습니다.
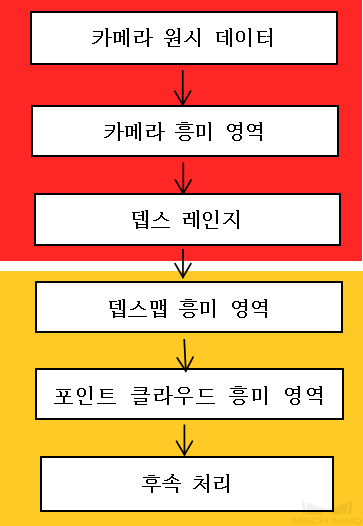
그림 1.1 포인트 클라우드 흥미 영역 설정 프로세스¶
먼저 Mech-Eye Viewer의 포인트 클라우드가 누락되었는지를 확인하세요. 이미 누락된 경우, Mech-Eye Viewer중의 설정을 체크해야 합니다. 누락되지 않는 경우, 다음에 카메라에서 이미지를 캡처하기 에 removeBackground 파라미터가 선택되었는지를 확인해야 합니다. 이미 선택되었다면 대응하는 Step의 VisualizeOutput 파라미터를 선택하고 단번 실행하며 그림 1.2에 표시하는 바와 같은 결과를 볼 수 있습니다. 빨간색 부분은 제거된 포인트 클라우드입니다. 이 단계에서 문제가 생긴다면 removeBackground 파라미터를 언체크하거나 ROI 설정 에서 다시 배경을 설정하면 됩니다. 선택되지 않는다면 포인트 클라우드 및 포즈를 표시하기 를 사용해서 Camera 또는 Generate Cloud가 출력하는 포인트 클라우드를 확인해야 합니다. 포인트 클라우드가 누락된 경우에 뎁스맵 흥미 영역을 다시 설정해야 하며 누락되지 않은 경우 Cloud ROI 혹은 Set Zeros for Depth Pixels Oit of ROI의 출력 결과를 확인해야 합니다.
Cloud ROI의 결과는 그림1.3과 같습니다. 그중 흰색 부분은 포인트 클라우드를 유지하는 뜻이고 빨간 부분은 포인트 클라우드를 제거하는 뜻입니다. 적절하지 않은 경우에 다시 설정해야 합니다.
Set Zeros for Depth Pixels Oit of ROI결과는 그림1.4와 같습니다. 왼쪽은 원본 깊이 그래프이고 오른쪽은 처리된 것입니다. 주의할 점은 이단계의 설정을 업데이트해야 하는 경우 프로젝트에 Cloud ROI가 있어야 하며 그렇지 않으면 설정할 수 없습니다.
여기에 언급된 확인 순서는 절대적인 것이 아니고 실제 상황에 따라 조정 가능합니다.
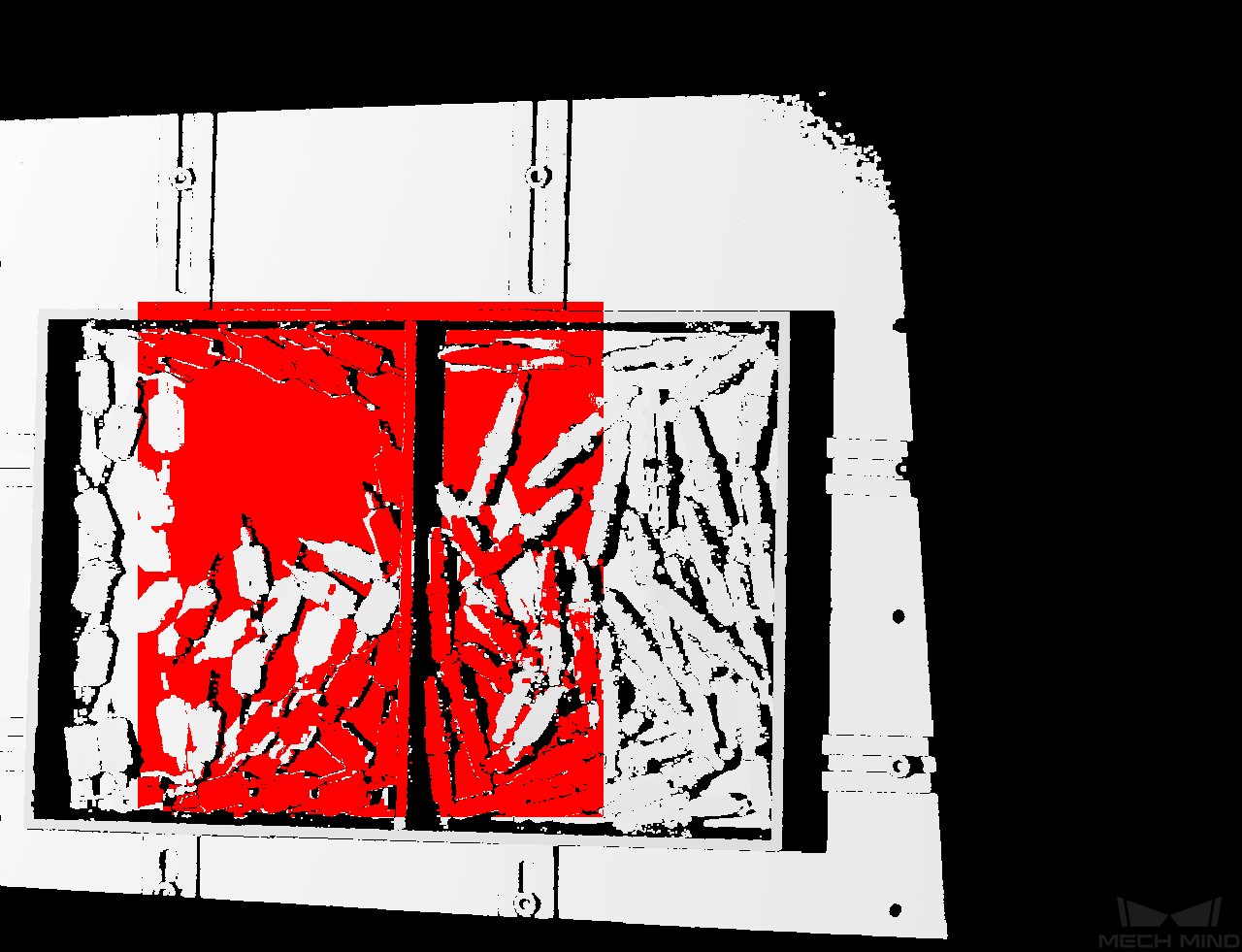
그림 1.2 배경 제거 결과¶
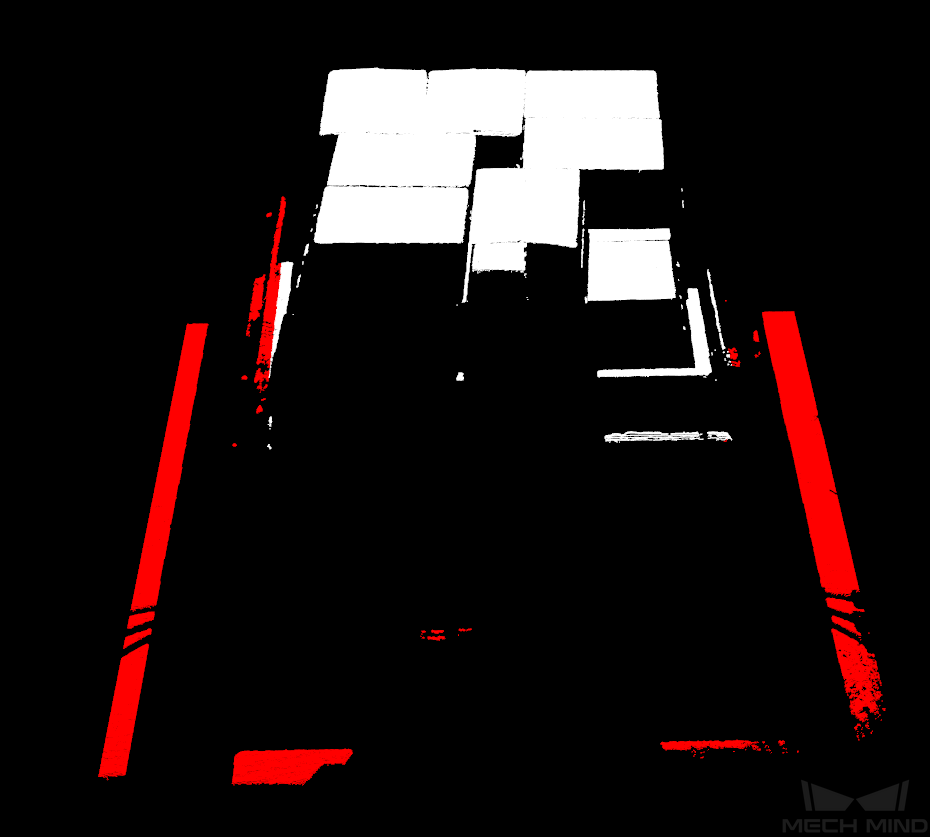
그림 1.3 Cloud ROI결과¶
그림1.4 Set Zeros for Depth Pixels Oit of ROI결과¶
Step 또는 파라미터를 못 찾는 경우¶
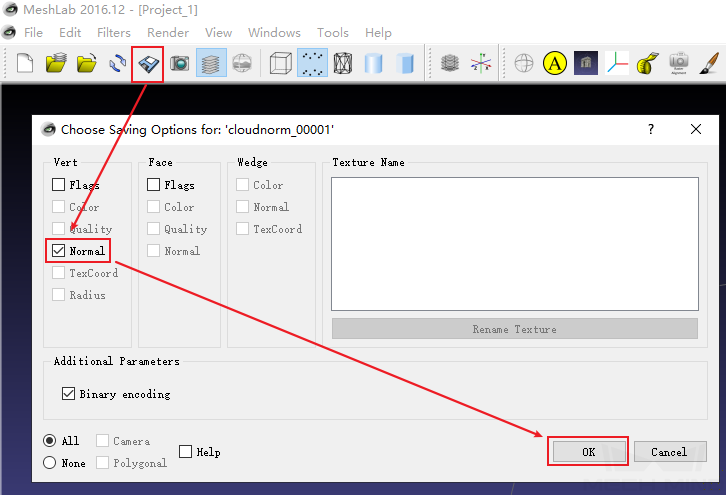
현장에서 실행하거나 R&D와 토론할 때 일부 파라미터나 Step을 찾지 못 할 경우가 발생할 수도 있습니다. 이는 현재 디폴트 설정은 자주 사용하는 Step과 속성만 표시하기 때문입니다. 이 두 옵션을 언체크해야 모든 Step을 볼 수 있습니다. 그림 1.5와 같습니다.
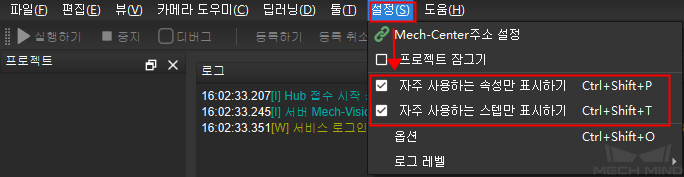
그림 1.5 자주 사용하는 파라미터 및 Step을 표시하는 옵션¶
업데이트되지 않는 파일¶
파일의 반복 로딩을 피하기 위해 현재 Step은 첫 로딩할 때 또한 파일 경로에 변동이 생길 때만 로딩됩니다. 파일이 이미 로드된 경우, 파일 내용만 업데이트되고 파일명이 변경하지 않으면 업데이트된 내용이 로딩되지 않을 것입니다. 이때 그림1.6에 표시하는 봐와 같이 중의 파일 리로딩 에 True를 선택하면 됩니다 . 다음으로 다시 로딩해야 할 Step을 단번 실행하거나 전체 프로젝트를 다시 실행하면 됩니다.
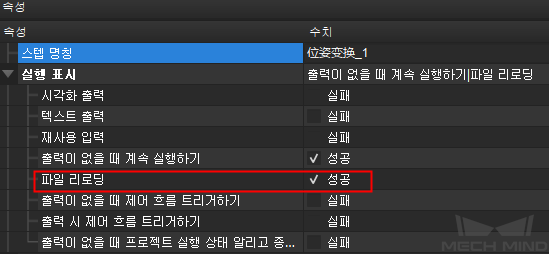
그림 1.6 파일 리로딩¶