Eye To Eye¶
듀얼 카메라 캘리브레이션은 카메라 두 대 간의 포즈 관계입니다. 현재 Eye To Eye를 사용해서 듀얼 카메라 포즈 관계의 캘리브레이션을 실현합니다. 듀얼 카메라 캘리브레이션은 카메라 뷰를 확대하고 카메라 두 대 겹친 부분의 포인트 클라우드의 질을 높입니다. 그림 1과 같습니다.
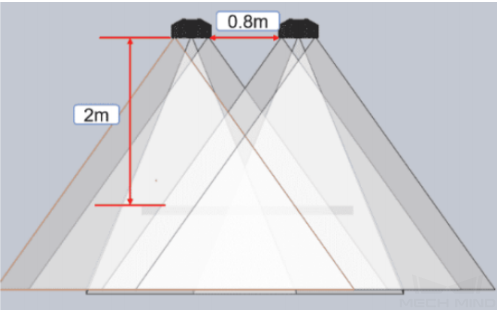
그림 1 쌍안 카메라의 뷰¶
다수의 랜덤 캘리브레이션 보드의 포즈
캘리브레이션 선결 조건: 사용하는 두 대 카메라의 해상도가 일치하며, 카메라 뷰 (2D&3D)의 겹친 구역이 작업 구역 전체를 커버할 수 있습니다.
Mech-Viz를 사용하거나 컨트롤 핸들을 통해 로봇을 이동시켜 캘리브레이션 보드를 듀얼 카메라 뷰의 겹친 구역의 중앙에 설치합니다. 이 때 캘리브레이션 보드가 현재 뷰에 있는 위치를 보기 위해 카메라를 연결하고 이미지를 캡처합니다. 을 클릭하여 캘리브레이션 사전 설정에 들어가서 캘리브레이션 포인트를 추가하는 방법을 “다수의 랜덤 캘리브레이션 보드의 포즈“를 선택하고 캘리브레이션 설치 방식은 “Eye To Eye”를 선택합니다. 그림2와 같습니다.
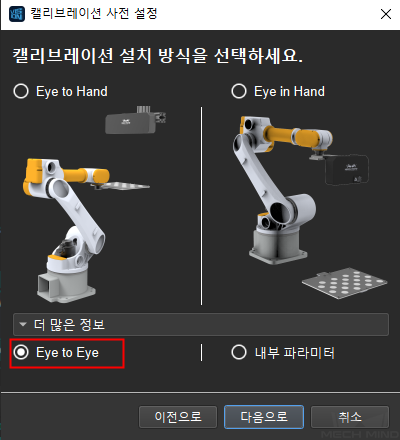
그림 2 카메라 설치 방식을 선택하기¶
캘리브레이션 인터페이스에 들어간 다음 듀얼 카메라를 연결하고 그 중의 한 대를 메인 카메라로 설정합니다. 그림3과 같습니다.
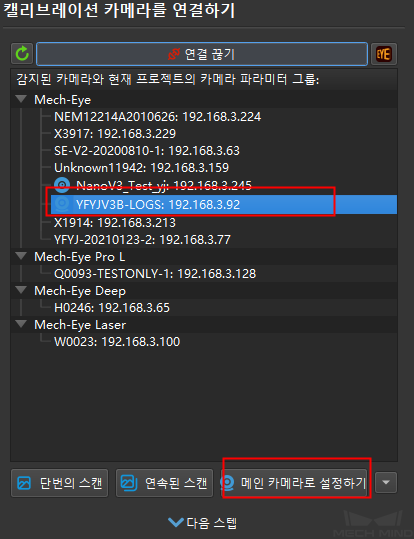
그림 3 메인 카메라를 설치하기¶
다음에 Eye To Hand “다수의 랜덤 캘리브레이션 보드의 포즈”에 따라 캘리브레이션을 하면 됩니다. 인터페이스에 표시된 데이터는 메인 카메라의 데이터이고 서브 카메라의 데이터도 동시에 생성됩니다. 캘리브레이션이 끝나고 듀얼 카메라의 외부 파라미터가 동시에 생성되어 Eye To Eye 캘리브레이션이 완성됩니다.
캘리브레이션이 완료된 외부 파라미터로 직접 계산하기
Eye To Hand를 사용하여 듀얼 카메라의 외부 파라미터를 캘리브레이션하고 Eye To Eye를 사용해서 두 대 카메라 간의 포즈 관계를 계산합니다. 카메라 켈리브레이션을 켜고 캘리브레이션 설치 방식은 Eye To Eye를 선택하며 “캘리브레이션 포인트를 추가하는 방법을 선택하기“ 중에 “캘리브레이션이 완료된 외부 파라미터로 직접 계산하기“ 를 선택하고 전에 캘리브레이션이 완료된 외부 파라미터 데이터를 선택합니다. 그림4와 같습니다.
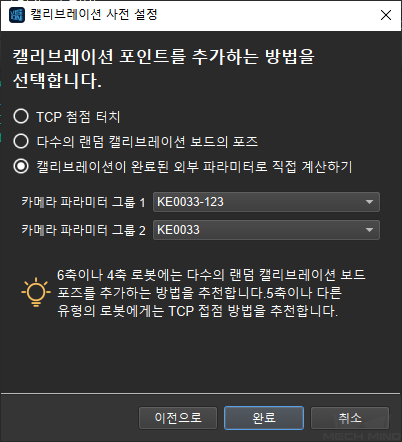
그림 4 캘리브레이션 포인트를 추가하는 방법을 선택하기¶
설정이 완료된 다음 카메라 연결이 필요없이 캘리브레이션 인터페이스에 들어가고 카메라 파라미터 계산하기 를 클릭하면 카메라 두 대 간의 포즈 관계를 획득할 수 있습니다. Mech-Viz에서 현재 포인트 클라우드를 표시하기 를 클릭하면 융합된 포인트 클라우드가 생성될 것입니다. 그림 5와 같습니다. 포인트 클라우드의 융합의 효과가 좋지 않는 경우, 듀얼 카메라의 외부 파라미터를 다시 캘리브레이션을 해야 합니다.
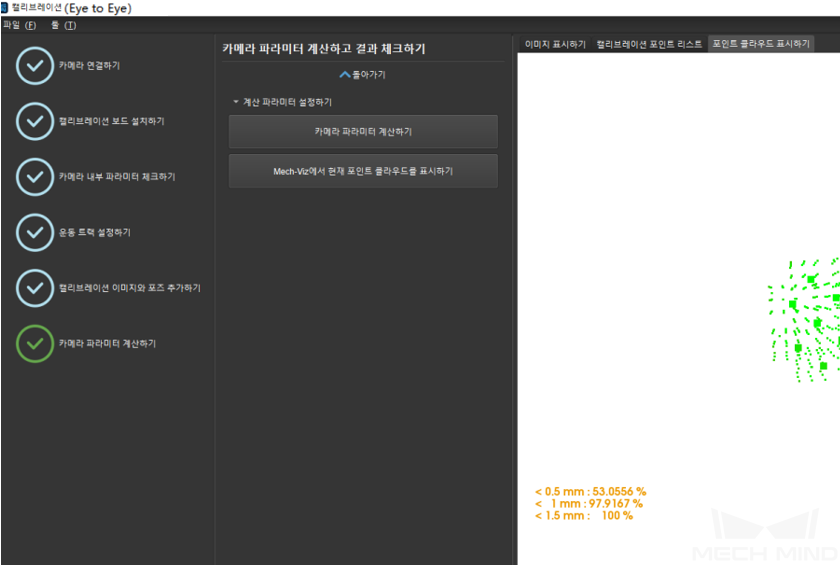
그림 5 포인트 클라우드를 보기¶
Mech-Vision 중에 구축된 프로젝트를 통해 듀얼 카메라 캘리브레이션의 융합 효과를 보기
프로젝트 구축은 그림 6과 같습니다. ”출력이 없을 때 제어 흐름을 촉발하기” 나 ”출력이 있을 때 제어 흐름을 촉발하기”를 체크하세요.
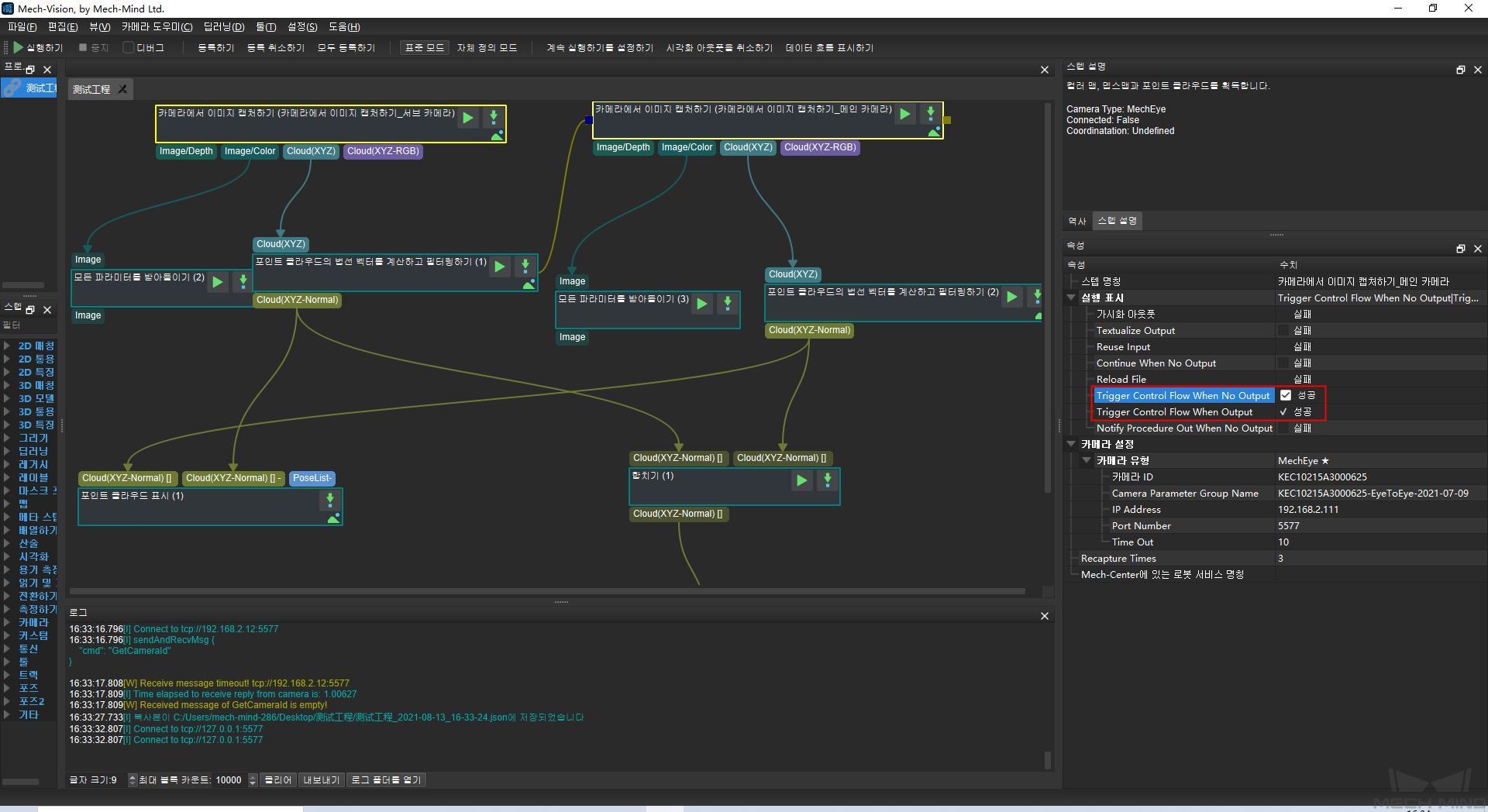
그림 6 프로젝트를 구축하기¶
“데이터를 합치기“를 한 번 실행하고 융합된 포인트 클라우드를 표시합니다. 합친 후에 출력된 포인트 클라우드는 융합된 전체 포인트 클라우드입니다. 그림7과 같습니다. 동시에 왼쪽 위에 있는 View as Whole| 1 | 2 를 클릭하면 포인트 클라우드를 스위치할 수 있습니다.
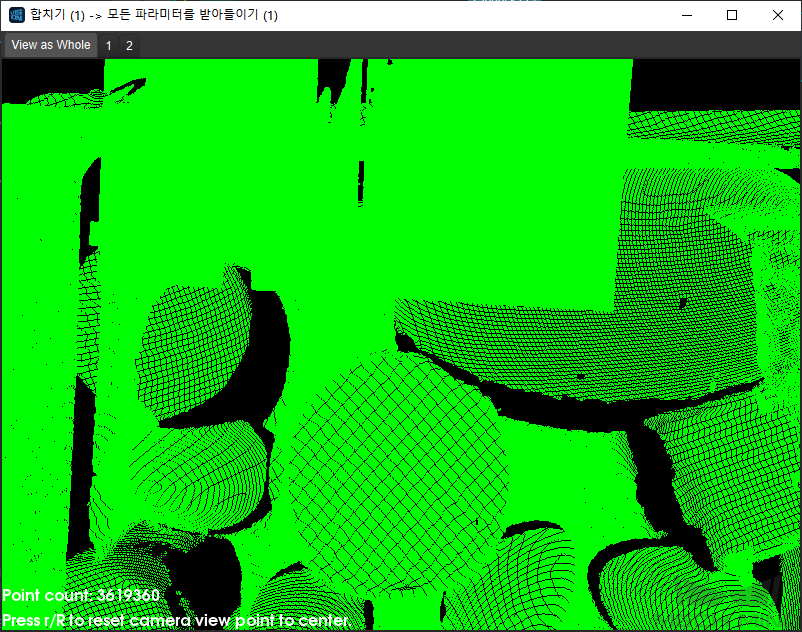
그림 7 융합된 포인트 클라우드¶