빠른 캘리브레이션¶
카메라를 바꾸는 시간 및 작업 공간에 대한 제한이 있거나 클램프를 설치, 분해할 때 불편을 많이 받는 경우에 사용자가 빠른 캘리브레이션을 통해 더 빠르고 편리하게 같은 모델의 카메라를 바꿀 수 있습니다.
카메라를 바꾸기 전의 준비¶
빠른 캘리브레이션을 사용하여 카메라에 대해 캘리브레이션을 하기 전에 사용자들이 주의해야 할 것:
이전에 사용했던 카메라 및 해당 카메라가 외부 파라미터 캘리브레이션 표준 모드 하에 획득한 카메라 파라미터 그룹을 준비하세요.
카메라에 맞춰 캘리브레이션 보드를 선택하여 이를 카메라 시야 범위에 있는 정상적인 작업에 영향을 주지 않으며 사용 편리한 위치에 고정시킵니다.(이 캘리브레이션이 이동하거나 고장이 나면 안됨)
Eye In Hand 경우에는: 로봇을 적당한 자리에 이동하고 Mech-Viz 프로젝트 혹은 제3자 풀 컨트롤 프로그램을 통해 이 포즈를 기록하며 “특징점을 기록할 때의 포즈” 및 “새로운 카메라가 이미지를 캡처할 때의 포즈” 가 일치해야 합니다.
특징점을 기록하기¶
를 클릭하여 빠른 캘리브레이션 모드에 들어갑니다. Mech-Vision에서 프로젝트가 이미 열려 있으며 기록한 특징점의 데이터가 해당 프로젝트 경로 아래에 저장될 것이며 프로젝트가 열리지 않은 경우에는 수동으로 경로를 선택해야 합니다. 이 프로젝트가 특징점을 기록한 적이 없으면 그림1에 표시하는 바와 같은 페이지로 들어가게 될 것입니다.
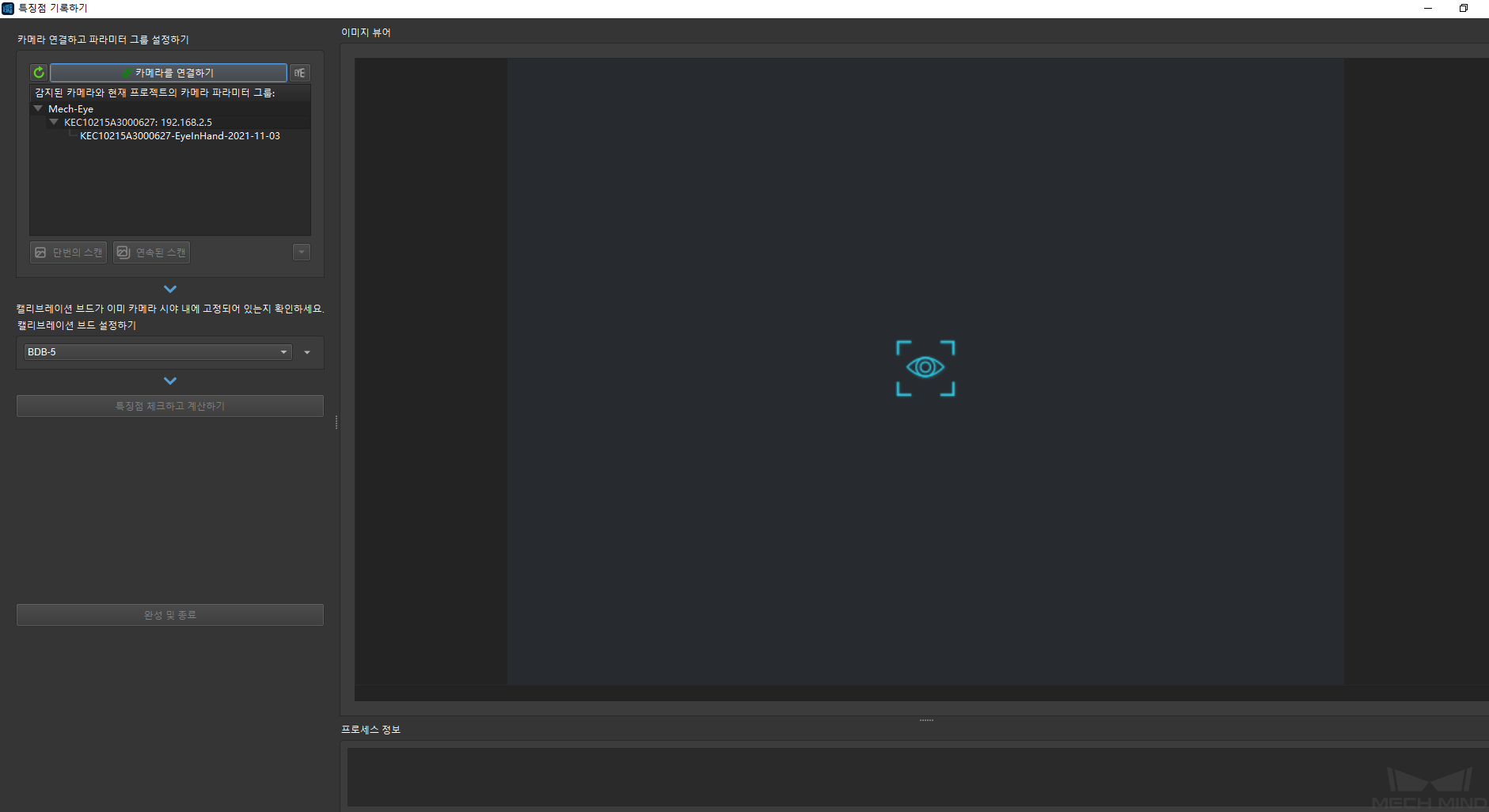
그림1 특징점을 기록하는 페이지¶
이 프로젝트가 특징점을 기록한 적이 있으면 그림2에 표시하는 바와 같은 팝업창이 나타날 것입니다. 새로운 카메라를 사용하기 전에 외부 파라미터 갱신하는 경우, 캘리브에리션 보드가 이동하거나 고장나는 경우, 로봇의 포즈가 변하는 경우에 고정 특징점을 다시 기록합니다 를 선택하세요.
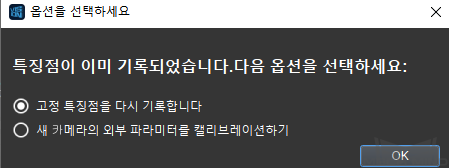
그림2 고정 특징점을 다시 기록하거나 새로운 카메라에 대해 캘리브레이션을 시작하기¶
특징점을 기록하는 페이지에 들어간 후 카메라를 먼저 연결하고 대응하는 외부 파라미터 그룹을 선택하세요. 카메라 파라미터 그룹이 하나만 있는 경우 수동으로 선택할 필요가 없습니다.
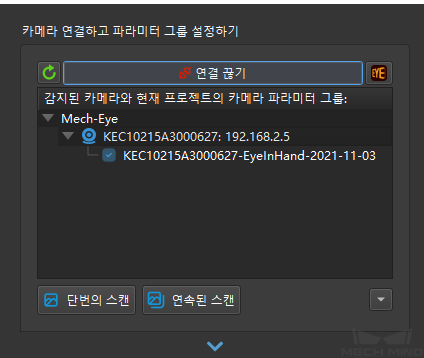
그림3 카메라를 연결하고 외부 파라미터 그룹을 선택하기¶
다음으로 사용할 캘리브레이션 보드 유형을 선택하세요. 설정이 다 끝난 후 특징점을 체크하고 계산하기 를 클릭하여 특징점을 기록하기 시작합니다. 완성 및 종료 버튼이 밝아지면 특징점 기록이 완성됐다는 뜻입니다. 이때 완성 및 종료 를 클릭하면 됩니다.
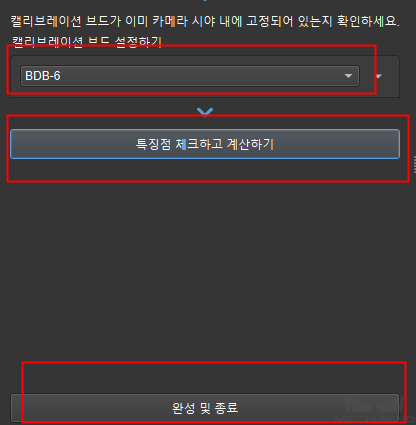
그림4 캘리브레이션 보드 유형을 설정하고 특징점을 계산하기¶
기록이 완성되면 프로젝트 파일 내 특징점 파일이 생긴 것을 볼 수 있습니다. 새로운 카메라를 바꾸면 이 프로젝트를 사용하여 직접 빠른 캘리브레이션을 시작할 수 있습니다.

그림5 특징점 파일¶
새로운 카메라의 빠른 캘리브레이션¶
빠른 캘리브레이션 페이지에 들어간 후 그림6에 표시하는 바와 같은 팝업창에서 새 카메라의 외부 파라미터를 캘리브레이션하기 .
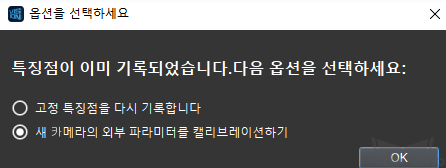
그림6 고정 특징점을 다시 기록하거나 새로운 카메라에 대해 캘리브레이션을 시작하기¶
새 카메라의 외부 파라미터를 캘리브레이션하기 를 클릭하면 그림7에 표시하는 바와 같은 빠른 캘리브레이션 페이지에 들어가게 됩니다. 먼저 새 카메라를 선택하여 연결합니다. 그 다음에 특징점을 체크하고 계산하기 를 클릭합니다. 마지막으로 완성 및 종료 를 클릭합니다. 알림 표시줄에 현재 진행 상황을 실시간으로 표시합니다.
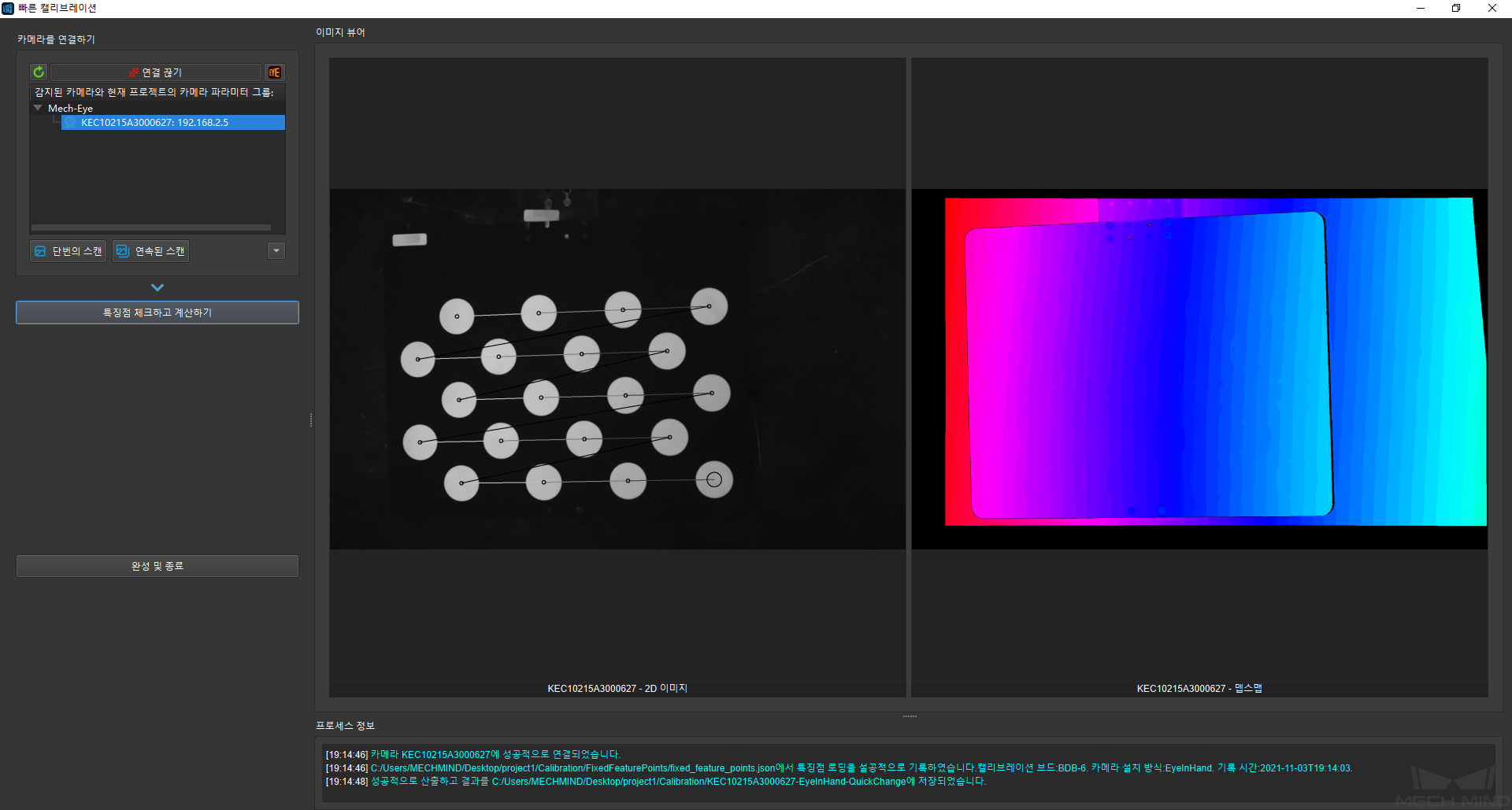
그림7 새 카메라 캘리브레이션¶
캘리브레이션이 끝난 후 vision 프로젝트에서 카메라와 파라미터 그룹을 전환할 수 있습니다. 빠른 캘리브레이션을 통해 얻은 새 카메라의 파라미터 그룹 파일의 위치는 그림8에 표시하는 바와 같습니다.
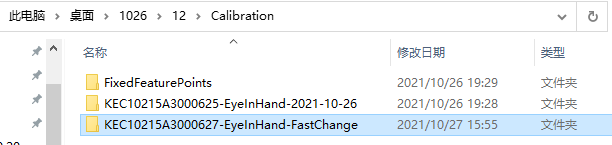
그림8 새 카메라 파라미터 그룹 파일¶