캘리브레이션 유형, 방법, 시나리오¶
이 부분에서는 주로 핸드-아이 캘리브레이션의 유형, 방법 및 시나리오를 소개합니다.
캘리브레이션 유형¶
카메라의 설치 방법에 따라 핸드-아이 캘리브레이션은 다음과 같이 나눌 수 있습니다.
ETH(Eye To Hand) 캘리브레이션 : 이 유형은 카메라 광학 중심과 로봇 기준 좌표 간의 포즈 관계를 캘리브레이션하는 데 사용됩니다.
EIH(Eye In Hand) 캘리브레이션 : 이 유형은 카메라 광학 중심과 로봇 말단 플랜지 중심 사이의 포즈 관계를 캘리브레이션하는 데 사용됩니다.
주의
ETH 캘리브레이션 방식의 경우 로봇 베이스 좌표나 카메라가 움직이면 해당 외부 파라미터가 같이 변경되며 이때 다시 캘리브레이션해야 합니다.
ETH 캘리브레이션 방식의 경우 로봇 말단 플랜지의 중심 좌표를 기준으로 카메라가 움직이면 그에 따라 해당 외부 파라미터가 변경되며 이때 다시 캘리브레이션해야 합니다.
로봇이 비전 시스템에 의해 제어되는지 여부에 따라 핸드-아이 캘리브레이션은 다음과 같이 나눌 수 있습니다.
자동 캘리브레이션(권장) : 로봇이 비전 시스템에 연결되고 비전 시스템이 로봇을 컨트롤하여 계획된 경로에 따라 자동으로 이동하고 자동으로 사진을 찍어 특징 포인트를 수집합니다.
수동 캘리브레이션 : 로봇을 비전 시스템에 연결할 수 없습니다. 특징 포인트를 수집하기 위해 사진을 찍고 로봇 포즈를 수동으로 입력하려면 티칭 머신을 통해 로봇을 수동으로 움직여야 합니다.
캘리브레이션 방식¶
캘리브레이션 방식은 핸드-아이 캘리브레이션을 위한 캘리브레이션 포인트를 추가하는 방식을 말합니다. 이 소프트웨어는 두 가지 캘리브레이션 방법을 제공합니다.
다수의 랜덤 캘리브레이션 보드 포즈(권장)
소프트웨어에서 자동으로 생성된 경로 포인트(평행이동량 및 회전량에 사용되는 캘리브레이션 경로 포함)를 사용하거나 수동으로 추가된 여러 포즈를 사용하여 각 경로의 경로 지점에서 사진을 찍고 캘리브레이션 보드의 구석점을 식별합니다. 그리고 마지막으로 캘리브레이션 포인트 열이 형성되고 캘리브레이션 보드, 카메라 및 로봇 간의 관계가 형성됩니다. 이 방법은 절차가 간단하고 캘리브레이션 정확도가 높습니다. 이 방법은 6축 또는 4축 로봇에 사용하는 것을 권장합니다.
TCP 첨점 터치
3점 방법을 사용하여 캘리브레이션 보드의 자세를 결정한 후 캘리브레이션 보드, 카메라 및 로봇 간의 관계가 설정됩니다. 이 방법은 로봇 활동 공간이 제한되어 있고 캘리브레이션 보드를 설치할 수 없는 상황에 적합합니다. 이 방법은 5축 또는 기타 로봇에 사용하는 것을 권장합니다.
팁
실제 응용 시나리오에서는 카메라 설치 방식, 로봇 종류, 로봇 활동 공간에 따라 캘리브레이션 방식을 결정하시기 바랍니다.
캘리브레이션 시나리오¶
이 부분에서는 캘리브레이션 시나리오와 그 원리를 설명합니다.
다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 ETH 캘리브레이션 시나리오¶

그림 1 캘리브레이션 보드 위치(다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 ETH 캘리브레이션 시나리오)¶
로봇의 말단은 알려진 사이즈의 캘리브레이션 보드에 플랜지를 통해 연결되고, 로봇 베이스 좌표(Base)를 기준으로 캘리브레이션 보드 위의 각 표시점의 좌표 A를 얻을 수 있습니다. 캘리브레이션 보드에 있는 각 포인트의 이미지는 카메라로 사진을 찍어서 얻고, 캘리브레이션 보드의 각 표시점에 대한 카메라 광학 중심의 좌표 B를 얻을 수 있습니다. 카메라의 광학 중심과 로봇의 기본 좌표 사이의 포즈 관계 X는 계산해야 되는 양입니다. A, B, X는 닫힌 루프를 형성하여 미지의 X를 풀 수 있는 방정식을 형성합니다. 캘리브레이션 보드와 플랜지 말단의 위치 관계 C는 미지이며 캘리브레이션 과정에서 캘리브레이션 보드의 일련의 상대 이동을 통해 캘리브레이션 보드와 플랜지 말단 사이의 위치 관계는 수치 계산법으로 계산되 이로써 A가 계산됩니다. 로봇 이동하는 것 을 통해 카메라에 대한 캘리브레이션 보드의 자세를 변환함으로써 여러 방정식 세트를 얻을 수 있으며 이러한 방정식의 값을 피팅하고 최적화하여 최적의 X 값을 얻을 수 있습니다. 포즈 관계는 아래의 그림과 같습니다.

그림 2 다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 ETH 캘리브레이션 시나리오¶
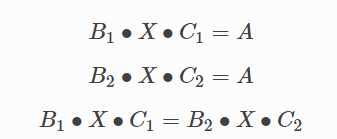
그림 3 카메라 좌표계와 로봇 좌표계의 대응 관계를 계산하는 공식¶
다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 EIH 캘리브레이션 시나리오¶

그림 4 캘리브레이션 보드 위치(다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 EIH 캘리브레이션 시나리오)¶
카메라는 고정 프레임을 통해 로봇의 말단에 고정되는데 이때 로봇 말단의 플랜지 중심과 카메라의 광학 중심 사이의 포즈는 상대적으로 고정되어 있습니다. 즉 아래의 그림 중의 알 수 없는 변수 X입니다. 로봇 베이스 좌표계(Base)에 대한 로봇 말단 플랜지 중심의 자세는 알려진 양 B입니다. 캘리브레이션 보드의 사진을 찍음으로써 카메라는 카메라의 광학 중심과 캘리브레이션 보드의 각 점 사이의 포즈 관계를 얻고 알려진 양 C를 얻을 수 있습니다. 캘리브레이션 보드는 카메라 시야의 도달 가능한 영역에 평평하게 배치되며 로봇의 기본 좌표에 대한 포즈 관계는 고정 값 A입니다. 이러한 방식으로 변수 A, B, C 및 X는 폐쇄 루프 관계를 형성합니다. 다음 방정식에서 A는 고정 값이므로 처음 두 방정식을 결합하고 X만 새로 얻은 방정식에서 풀어야 할 미지의 양입니다. 로봇 말단 포즈를 변환하고 다양한 각도에서 사진을 찍어 A, B, C 값의 여러 세트를 얻고 이 값을 사용하여 최적의 X 값을 얻기 위한 피팅 계산을 수행합니다.

그림 5 다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 EIH 캘리브레이션 시나리오¶
카메라 좌표계와 로봇 좌표계의 대응 관계 계산식은 위의 그림 3을 참조하십시오.
TCP 첨점 터치를 사용한 ETH 캘리브레이션 시나리오¶

그림 6 캘리브레이션 보드 위치(다수의 랜덤 캘리브레이션 보드 포즈를 사용하는 ETH 캘리브레이션 시나리오)¶
TCP 터치 방법을 캘리브레이션에 사용하는 경우 캘리브레이션 보드를 작업면에 놓고 로봇 말단에 이미 알려진 크기의 첨점을 설치하여 캘리브레이션 보드의 원점에 닿게 하는 방식으로 원리는 아래 그림과 같습니다. 그림과 같이 A와 B가 알려진 곳에서 X의 값을 풉니다. 캘리브레이션 보드와 로봇 말단은 고정되어 있지 않으며, A 값은 알려진 TCP 좌표의 첨점으로 캘리브레이션 보드의 마크 포인트를 터치하여 계산됩니다.

그림 7 TCP 첨점 터치를 사용한 ETH 캘리브레이션 시나리오¶
카메라 좌표계와 로봇 좌표계의 대응 관계 계산식은 위의 그림 3을 참조하십시오.
TCP 첨점 터치를 사용한 EIH 캘리브레이션 시나리오¶

그림 8 캘리브레이션 보드 위치(TCP 첨점 터치를 사용한 EIH 캘리브레이션 시나리오)¶
TCP 터치 방법을 사용하여 캘리브레이션할 때 캘리브레이션 보드를 작업면에 놓고 로봇 말단에 알려진 크기의 TCP 첨점을 설치하고 캘리브레이션 보드의 원점을 터치합니다. 원리는 아래의 그림과 같습니다. 여기서 A, B 및 C를 알고 있으면 X 값도 얻을 수 있습니다.
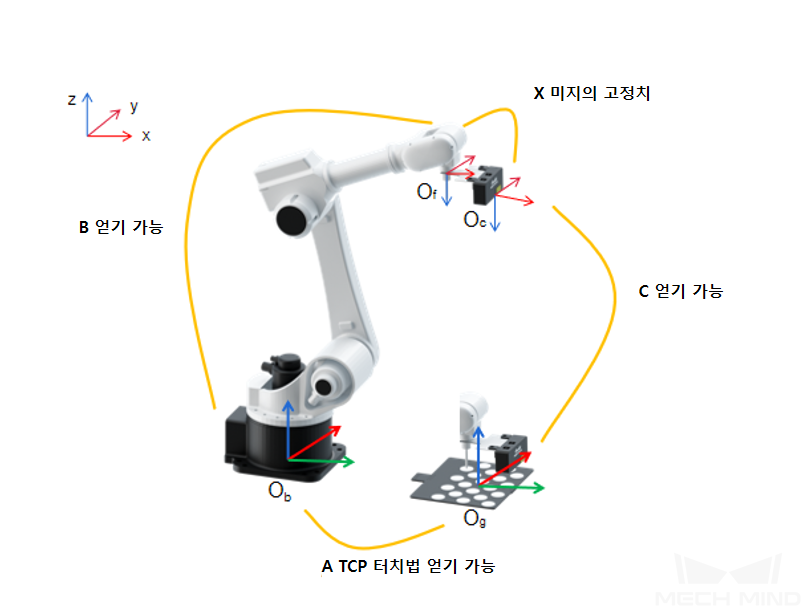
그림 7 TCP 첨점 터치를 사용한 EIH 캘리브레이션 시나리오¶
카메라 좌표계와 로봇 좌표계의 대응 관계 계산식은 위의 그림 3을 참조하십시오.