부록¶
Mech-Viz를 사용한 충돌 감지¶
XXX/Mech-Center/tool/viz_project/check_collision 파일의 check_collision.viz 프로젝트와 함께 사용하려면 다음 사항에 주의하십시오.
check_collision 프로젝트는 예시 프로젝트일 뿐이며, 프로젝트에 이동 태스크와 관련된 태스크를 제외하고는 다 필요하며 해당 프로젝트의 상대 위치를 삭제하거나 변경할 수 없습니다. 로봇 모델 중 실제 사용하는 모델을 선택하십시오.
이동 태스크와 관련된 태스크는 실제 상황에 따라 추가 또는 삭제될 수 있습니다. 전송된 포즈의 수는 이동 태스크와 관련된 태스크의 수와 일치합니다.
Home 위치가 필요한 경우 로봇 측에서 카메라 트리거 명령을 호출하기 전에 포즈 설정 명령을 한 번 호출할 수 있습니다.
Mech-Viz 빨판 파티션 기능 사용¶
XXX/Mech-Center/tool/viz_project/suction_zone 파일의 Suction_zone.viz 프로젝트와 함께 사용하려면 다음 사항에 주의하십시오.
suction_zone.viz 프로젝트는 샘플 프로젝트로, 프로젝트에 이동 태스크와 관련된 태스크를 제외하고는 다 필요하며, 해당 프로젝트의 상대 위치를 삭제하거나 변경할 수 없습니다. 로봇 모델 중 실제 사용하는 모델을 선택하십시오.
이동 태스크와 관련된 태스크는 실제 상황에 따라 추가 또는 삭제될 수 있습니다. 전송된 포즈의 수는 이동 태스크와 관련된 태스크의 수와 일치합니다.
Home 위치가 필요한 경우 로봇 측에서 카메라 트리거 명령을 호출하기 전에 포즈 설정 명령을 한 번 호출할 수 있습니다.
사용하기 전에 빨판 파일을 구성해야 합니다.
로봇 측에서는 카메라 트리거 명령을 먼저 호출한 다음 DO 신호 리스트 획득하기 명령을 호출해야 합니다.
물체 레이블 식별 기능 보내기¶
로봇에 전송되는 레이블 필드는 레이블 코드(정수 표시)입니다. Mech-Vision 프로젝트에서 레이블 매핑을 설정해야 합니다.
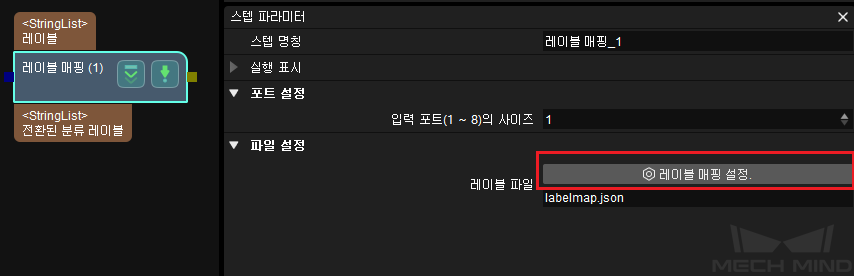
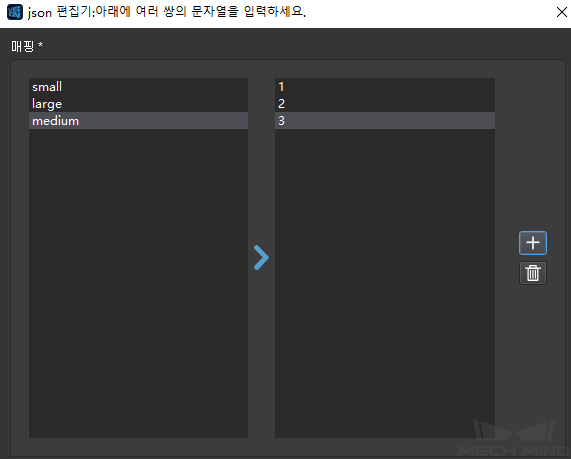
레이블 매핑 파일의 형식은 다음과 같습니다.
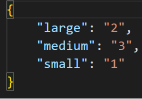
large 、small、medium은 레이블 문자열입니다.
1, 2, 3은 레이블 코드입니다.
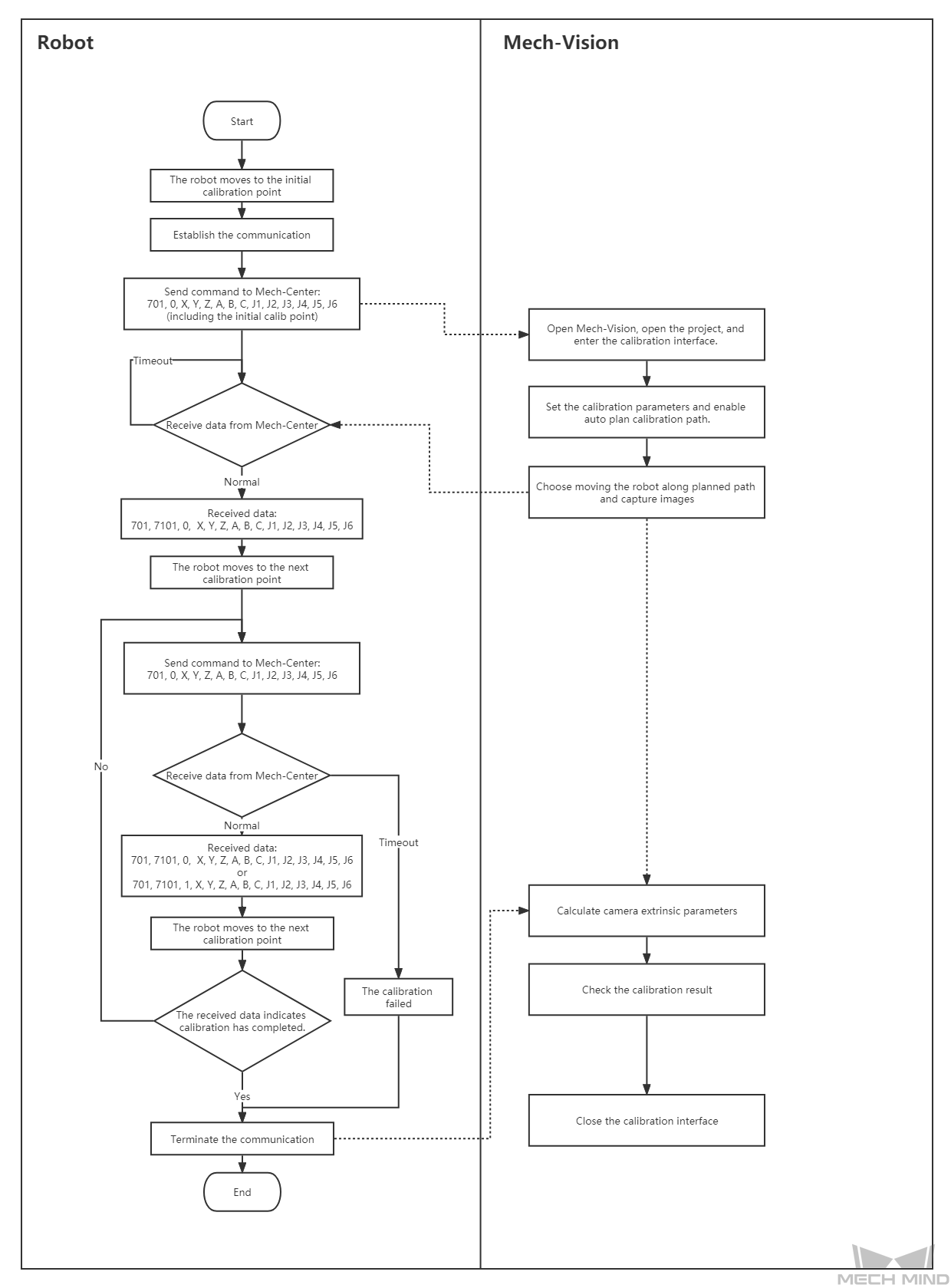
로봇 자동 캘리브레이션 프로그램 흐름¶
카메라 노출 추가 완료¶
PROFINET 및 EtherNet/IP 프로토콜의 표준 인터페이스는 시스템 비트를 최적화하는 데 주로 사용되는 카메라 노출 완료 신호를 제공합니다. Mech-Vision 프로젝트 계산 시간이 긴 경우 로봇은 카메라 노출이 완료된 직후 위치를 이동해야 합니다. 카메라 노출 완료 신호 생성에는 Mech-Vision 프로젝트에서 몇 가지 필요한 설정이 필요합니다.
Mech-Vision 프로젝트에 알림 을 추가해 카메라에서 이미지를 캡처하기 의 제어 흐름에 연결합니다. 카메라에서 이미지를 캡처하기 의 을 True 로 설정합니다.
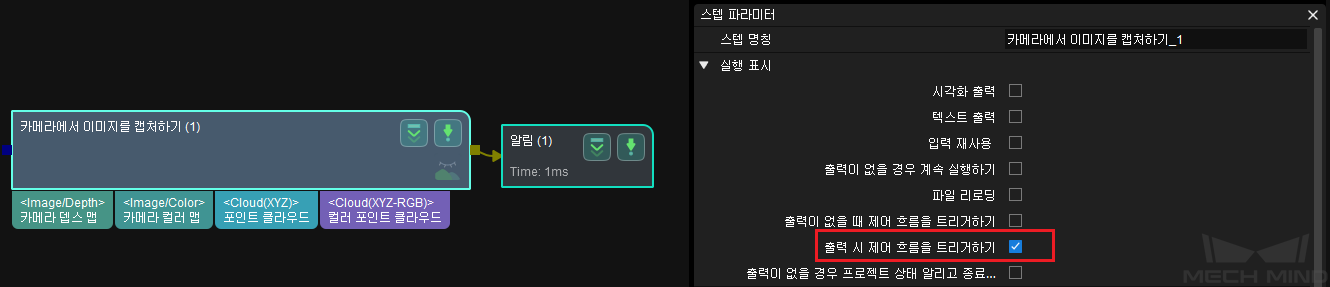
알림 의 서비스 이름을 Standard Interface Notify 로, 메시지 내용을 1001 으로 설정합니다(1001의 메시지 내용은 변경할 수 없습니다).

Mech-Vision 프로젝트를 실행하고 카메라 노출이 완료되면 PLC/로봇 측에서 Exposure_Complete 신호를 수신합니다. Exposure_Complete 신호를 수신한 후 Reset_Exposure 신호를 사용하여 Exposure_Complete 신호를 재설정합니다. 시스템이 10초 이내에 재설정 신호를 수신하지 않으면 Mech-Center 데이터 확인 신호 시간 초과 오류 메시지가 표시됩니다.