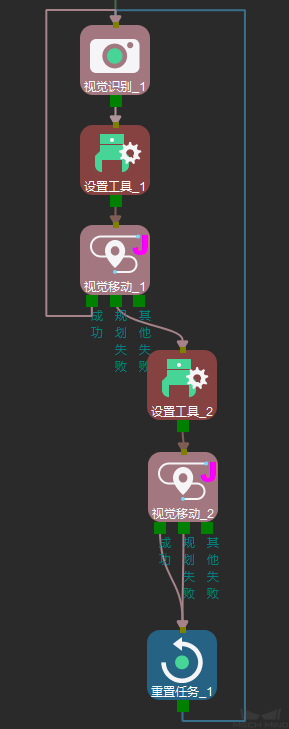
視覚処理による移動¶
功能描述¶
ビジョンサービスから取得した位置姿勢に従って動作します。
出口 |
説明 |
成功 |
経路の計画に成功しました。 |
計画失敗 |
経路の計画に失敗しました。 |
他の失敗 |
経路を計画していないとき、視覚処理による移動に必要なデータはありません(Mech-Visionから位置姿勢が出力されない場合、Mech-Visionから位置姿勢が出力されましたが要件を満たしている結果はない場合を含むが、これに限定されるものではありません)。 |
使用场景¶
普通、ロボット把持に使用されます。
参数说明¶
本節では、
はチェックが外れていること、
はチェックが入っていることを表します。
移動タスクの基本的なパラメータ
詳しくは、 移動タスクの一般パラメータ をお読みください。
重要なプロパティ
- 一度に全ての目標点に到達
- 視覚結果を再使用
- 視覚結果を共有
稼働モード
稼働モードは、次の三つの種類があり、それぞれ異なる調整可能なパラメータがあります。
非パラメータの設定
パラメータ |
説明 |
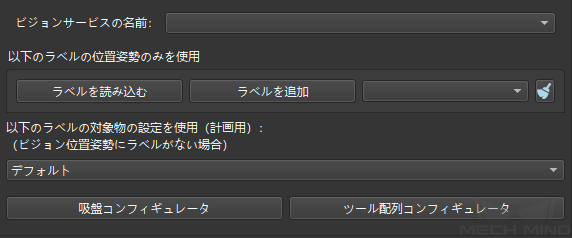
サービス名 |
普通、 视觉识别 と同じMech-Visionプロジェクトを選択します。 |
以下のラベルの位置姿勢のみを使用 |
ビジョンサービスによって提供された視覚結果に異なるラベルを含む可能性があります。 視覚処理による移動 は選択されたラベルの位置姿勢のみを使用します。 |
ラベルを選択:ラベルを選択するには、ラベルを読み込む または ラベルを追加 をクリックします。ラベルを選択したら、それが右のドロップダウンメニューに表示されます。 |
|
ラベルを削除:ラベルを削除するには、 |
|
以下のラベルの対象物の設定を使用(計画用) |
異なるワークに対して、異なる「対象物の設定」を使用し、また異なるラベルに対応します。 |
視覚結果にラベルがないときに デフォルト を選択します。 |
|
視覚結果に対応するレベルがあるときに対応するレベルを選択します。 |
|
吸盤コンフィグレータ |
詳しくは 吸盤コンフィグレータ を読みください。 |
ツール配列コンフィグレータ |
詳しくは ツール配列コンフィグレータ をお読みください。 |