ツール配列¶
ツール配列は、単列複数エンドツールのみをサポートしています。ツール配列モードでは、調整可能なパラメータは次の通りです。
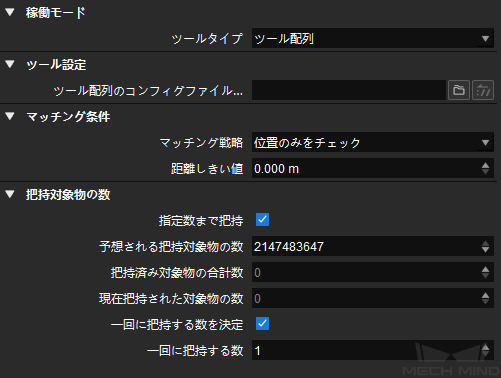
エンドツールの設定
- ツール配列のコンフィグファイルパス
 をクリックしてツール配列のコンフィグファイルを選択します。ツール配列コンフィグレータ を使用すればツール配列を設定し、jsonファイルをエクスポートすることができます。
をクリックしてツール配列のコンフィグファイルを選択します。ツール配列コンフィグレータ を使用すればツール配列を設定し、jsonファイルをエクスポートすることができます。
マッチング条件
- マッチング戦略
「位置のみをチェック」を選択したら、「距離しきい値」しか調整できません。「位置と方向をチェック」を選択したら、「距離しきい値」と「角度しきい値」を調整できます。
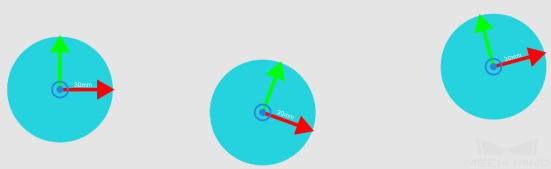
- 距離しきい値
- 調整説明:位置姿勢を円心に、距離しきい値を半径をとして円を描いて把持位置とします。調整の例:
距離しきい値を30mmに設定すれば、把持位置は下図に示します。
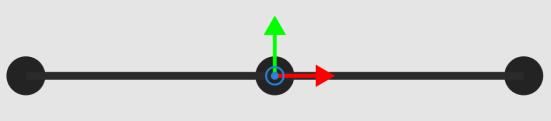
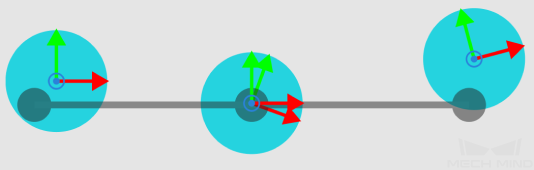
三つのエンドがあるツール配列。エンド間の距離は100mmです。下図に示します。

把持の動作を計画する際に、ソフトウェアでは、ツールの三つのエンドを把持の位置(下図の水色の円)に入れるように位置を見つけます。
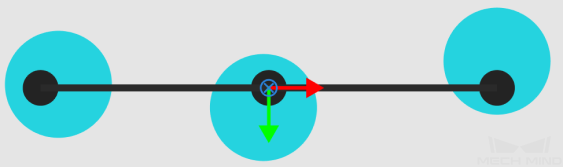
三つのエンドを全部マッチングできない場合、二つのエンドをマッチングします。
- 角度しきい値
- 調整説明:把持点とツール位置姿勢との角度を調整します。調整の例:
TCPの座標をTCPのX軸を中心に180°回転させてZ軸を上向きにし、把持点の位置姿勢の向きと一致させます。
把持点の位置姿勢とTCPの各軸との角度を確認します。角度が「角度しきい値」内であれば、把持に成功すると判断され、「角度しきい値」を超えたら失敗すると判断されます。
このモードでは、組合せに物体のロスが発生し、かつこの組合せは回転対称性がなくても構いません。例えば、四つのエンドがあるツール配列の場合に、エンドの番号をそれぞれ0、1、2、3とします。三つの物体があり、位置はOOXOであれば、エンド0、1、3をオンにする必要があります。OOXOを 180°回転させて OXOOにしたら、回転対称性はありません。
把持対象物の数
此参数组用于抓取计数,并自动计算剩余的抓取数量。如 目标抓取数量 中输入订单数量,即可实现订单抓取数量计数与订单剩余数量自动计算。
- 予想される把持対象物の数
把持する対象物の最大値。
- 把持済み対象物の合計数
把持した対象物の合計数です。ソフトウェアでは自動的に計算するので、手動で変更することはできません。
- 現在把持された対象物の数
現在ロボットが把持した対象物の数です。ソフトウェアでは自動的に計算するので、手動で変更することはできません。