ようこそ
最初の応用を始める
ソフトウェアの使用ガイド
ロボットの通信設定
応用ガイド
付録
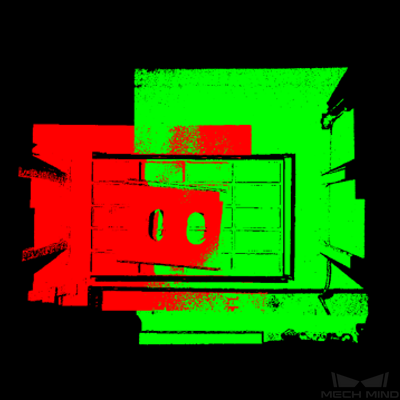
点のフィルタリング
▶
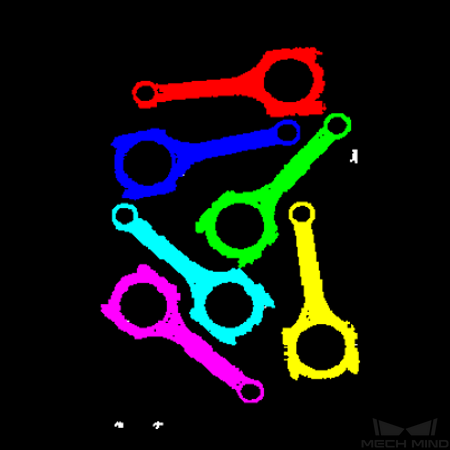
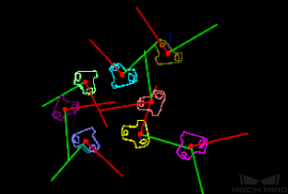
点群クラスタリング
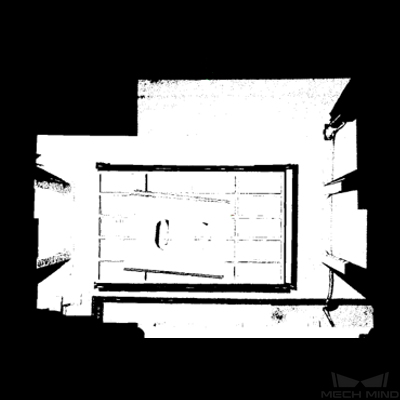
点群をマージ
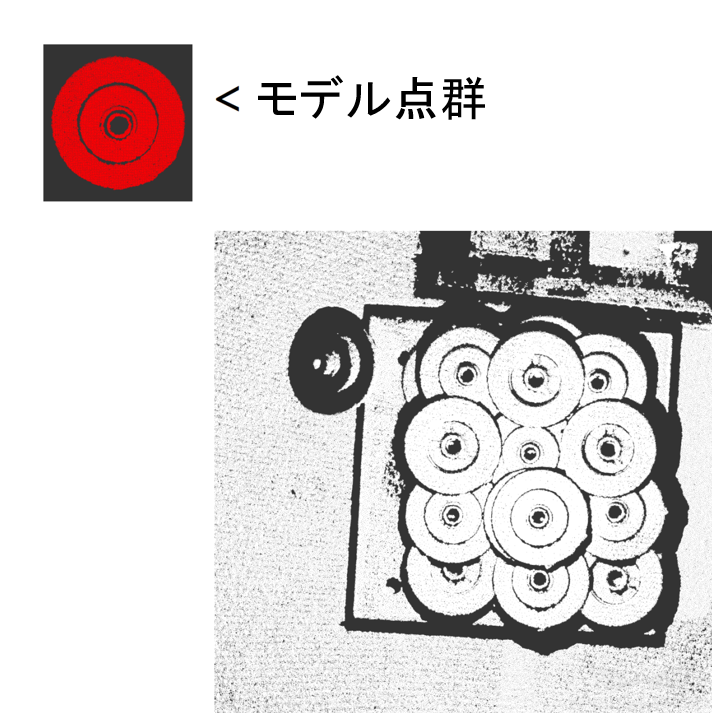
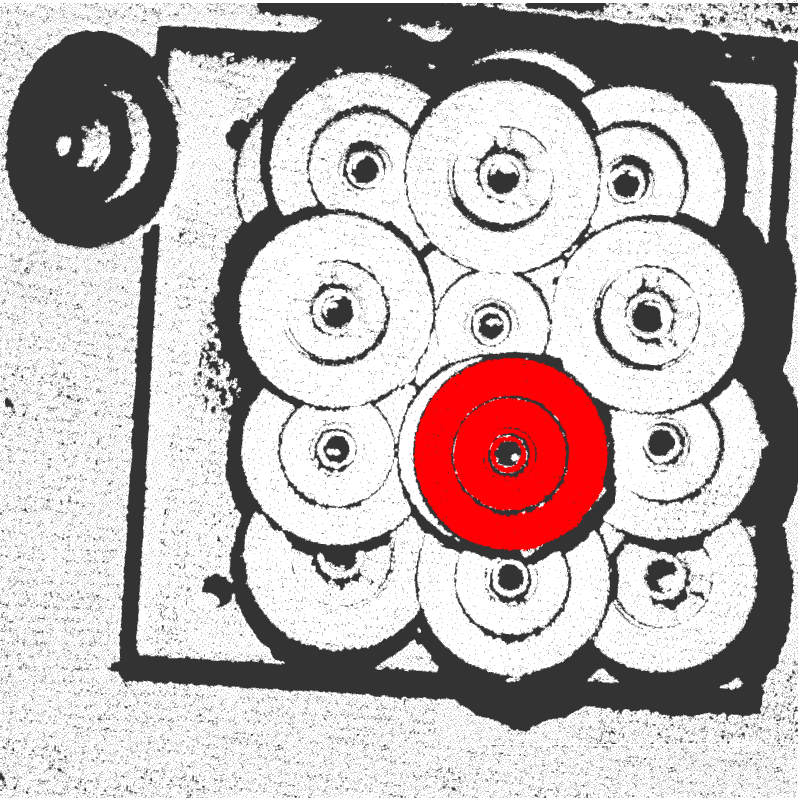
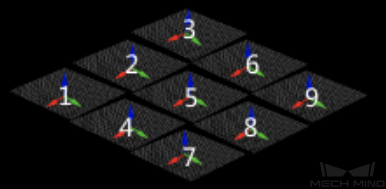
3D位置姿勢推定
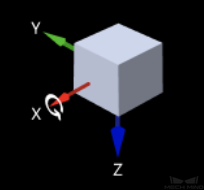
位置姿勢の座標軸方向を反転
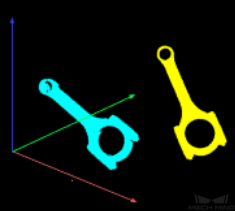
位置姿勢を変換
2D方法による点群境界を推定
3D方法による点群境界を推定
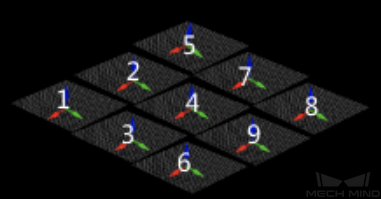
3D位置姿勢をソート
点群と位置姿勢を表示