ようこそ
最初の応用を始める
ソフトウェアの使用ガイド
ロボットの通信設定
応用ガイド
付録
機能のディスクリプション
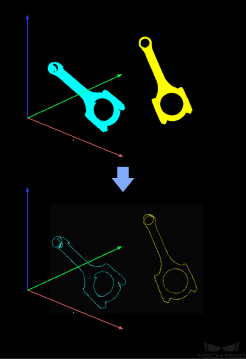
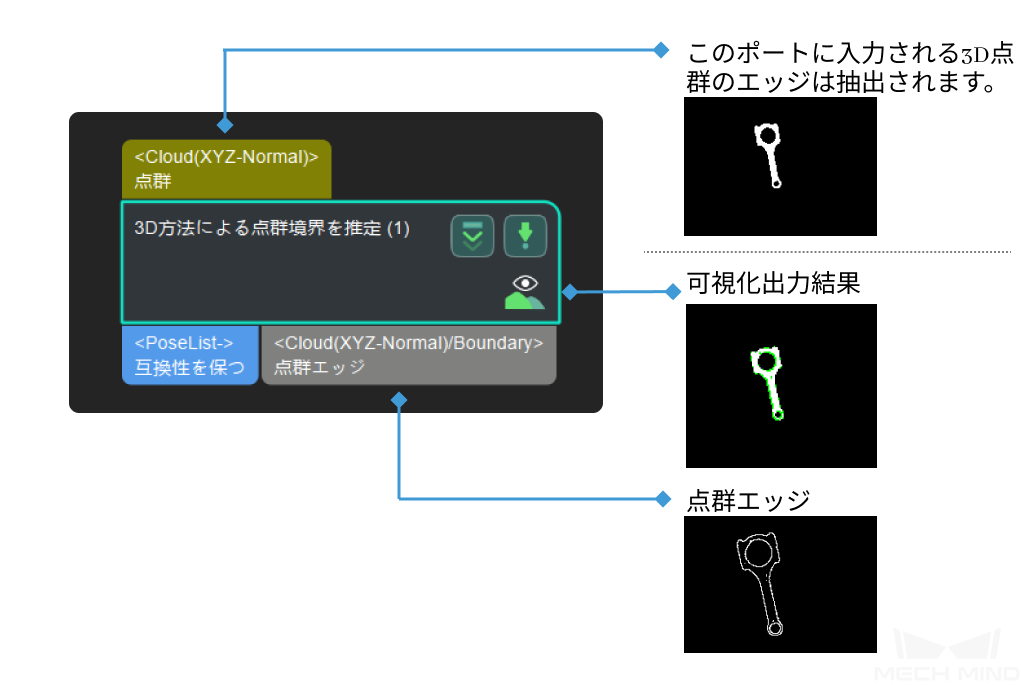
3D点群のエッジを抽出します。
使用シーン
普通、点群のエッジに基づくマッチングに使用され、全部の点群に基づくマッチングより高速です。
入力と出力