2D方法による点群境界を推定¶
機能のディスクリプション
入力点群から点群エッジを抽出します。

使用シーン
このステップは、通常、平面部品の供給シーンに平面部品の点群エッジを取得するために使用されます。よく3D位置姿勢推定の関連ステップと併用されます。このステップの処理速度は、3Dエッジ抽出アルゴリズムよりも高速なので、実行時間が短く、3D点群の干渉が多く、対象物の最も外側の境界点のみを抽出する必要があるシーンに使用することをお薦めします。
入力と出力
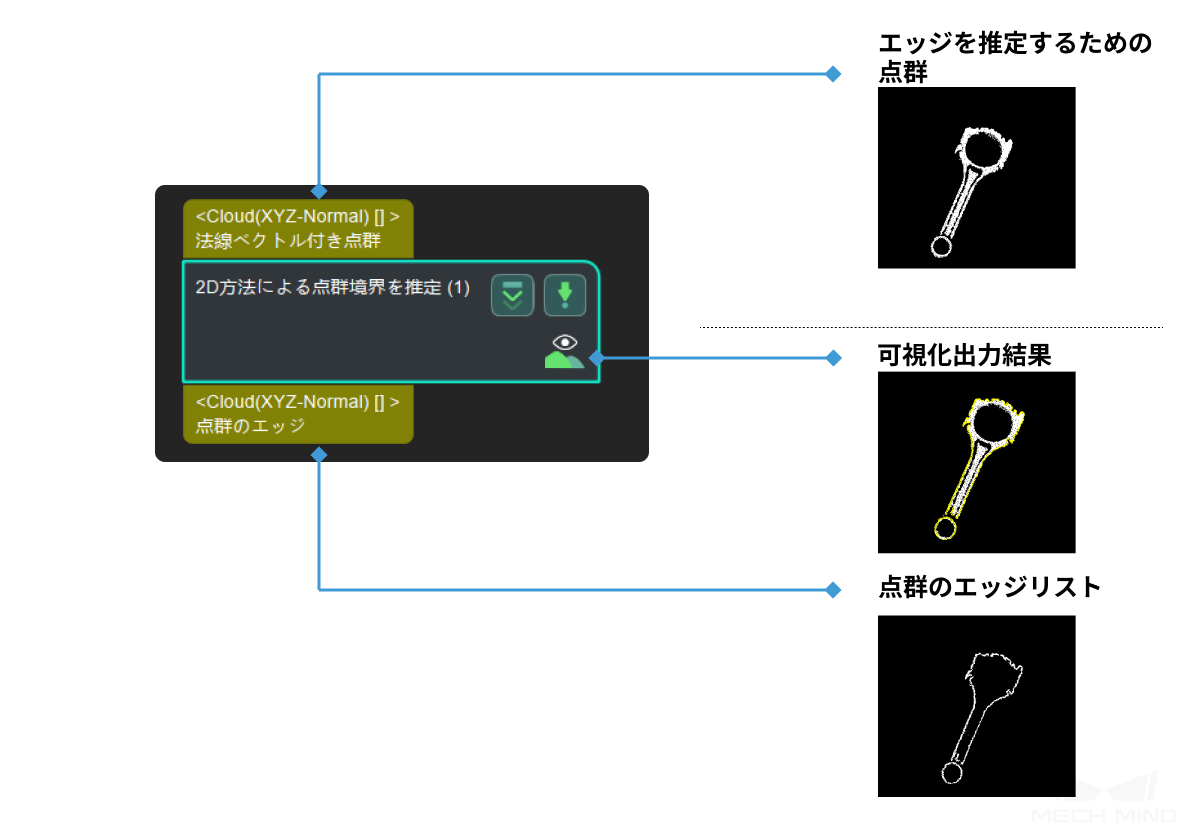
機能のディスクリプション
入力点群から点群エッジを抽出します。
使用シーン
このステップは、通常、平面部品の供給シーンに平面部品の点群エッジを取得するために使用されます。よく3D位置姿勢推定の関連ステップと併用されます。このステップの処理速度は、3Dエッジ抽出アルゴリズムよりも高速なので、実行時間が短く、3D点群の干渉が多く、対象物の最も外側の境界点のみを抽出する必要があるシーンに使用することをお薦めします。
入力と出力