点群形状検出器¶
機能のディスクリプション
平面または円柱形状の点群を検出して出力します。その中、パラメータで必要な形状を選択できます。
使用シーン
平面、円柱形状の物体の検出によく使われます。
円柱点群の把持位置姿勢を計算する場合、ステップ 円柱の把持位置姿勢を計算 もしくは オフセットによって位置姿勢を調整 をこのステップの後につなぐことができます。
入力と出力
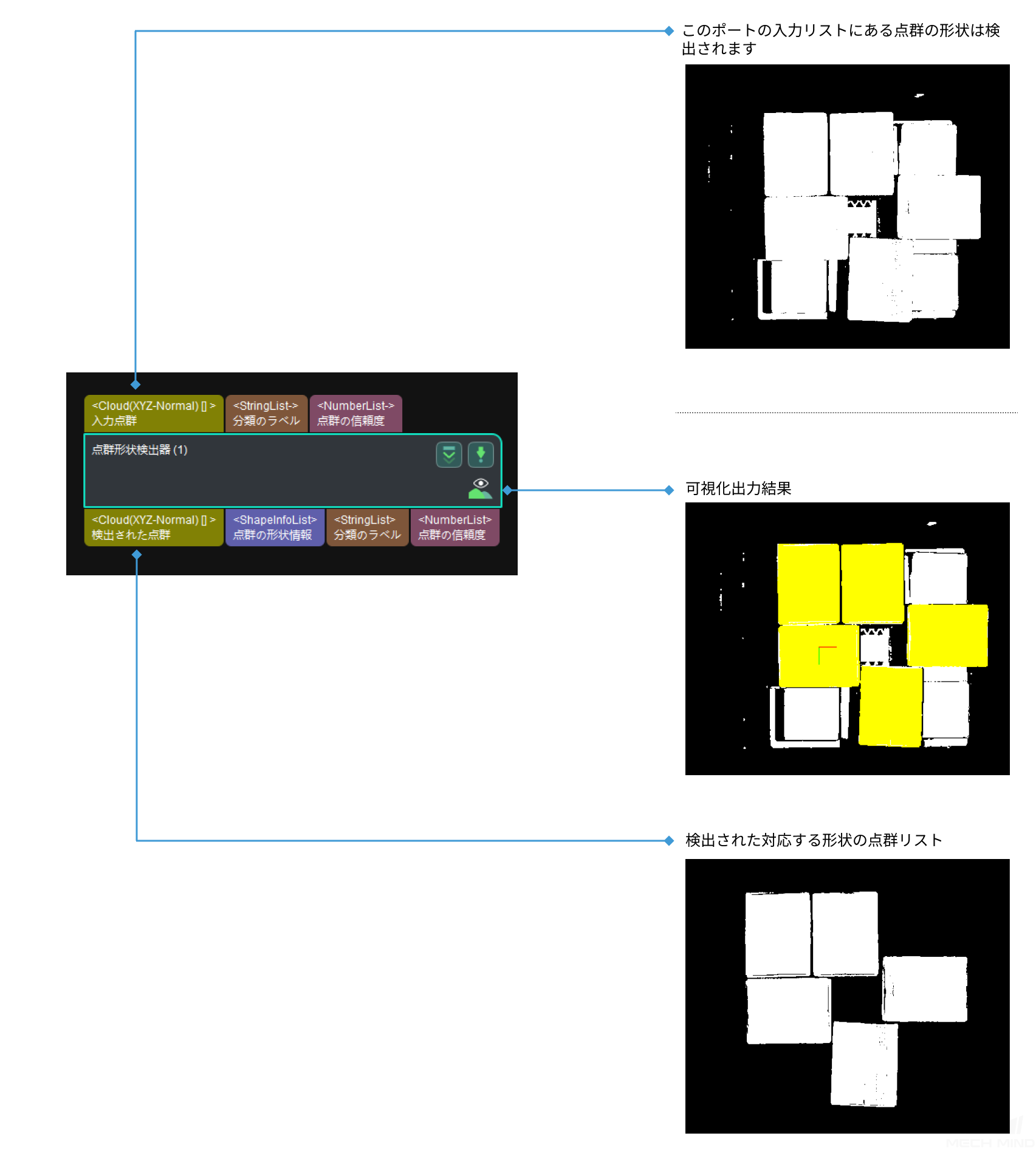
パラメータの説明
形状のタイプ
調整説明:このパラメータは、検出する形状のタイプを選択するために使用されます。平面(plane)、円柱(cylinder)および球(sphere)が選択可能です。初期値:平面推奨値:実際のニーズに応じて設定してください。検出のパラメータ
検出のアルゴリズム
調整説明:このパラメータは、検出中で使用するアルゴリズムを選択するために使用されます。ALGO1とALGO2の二種類が選択可能です(後で最適化されます)。初期値:ALGO1推奨値:ALGO1法線ベクトルの偏差の最大しきい値
調整説明:このパラメータは、実際の画像内の点の法線ベクトルと、投影後の論理的に対応する基準形状上の点に対応する法線ベクトルとの角度偏差の角度偏差の上限を表します。単位は°で、法線ベクトルと理論上の法線ベクトル間の誤差範囲の上限を与えます。初期値:30.0000推奨値:実際のニーズに応じて設定してください。点群変動の誤差
調整説明:このパラメータは、点群変動の誤差の許容範囲を制御するために使用されます。初期値:0.0050推奨値:[0.0030,0.0050]クラスタリングの最小間隔
調整説明:点群の異なる部分は同じクラスであるかどうかを判断するために使用されます。大きくすると、遠くの点群も同じクラスに分類されます。小さくすると、近くの点群の異なるクラスに分類されます。初期値:0.0050推奨値:実際のニーズに応じて設定してください。点群定量化解像度
調整説明:このパラメータは、点の数および密度を制御するために使用されます。これを大きくすると、点群が密になり、計算精度は向上しますが、計算時間は長くなります。これを小さくすると、点群がまばらになり、計算精度が低下する可能性がありますが、計算時間は短縮されます。初期値:0.0050推奨値:計算効果と時間の長さを共に確保する場合は、このパラメータの値を「クラスタリングの最小間隔」の2倍に設定するのが最適です。出力結果の数
調整説明:このパラメータは、各入力点群が最終的に出力結果の数を制御するために使用されます。初期値:1推奨値:実際のニーズに応じて設定してください。点群の数によってソートするか
調整説明:点群の数によってソートするかどうかを決めるために使用されます。初期値:チェックを入れる推奨値:実際のニーズに応じて設定してください。検出の成功率
調整説明:このパラメータは、検出の成功率を調整して、対応する形状を検出するのに十分な成功率があることを確認するために使用されます。初期値:0.9900推奨値:実際のニーズに応じて設定してください。候補点のフィルター
最小被覆率
調整説明:すべて検出された形状のある点の合計数に対する、検出によって得られた形状のある点の数の比率です。このパラメータの設定値よりも小さい場合、対応する形状の点は除去されます。初期値:0.1000推奨値:実際のニーズに応じて設定してください。最小平均距離誤差
調整説明:実際の点と、対応する検出された論理的な形状モデル内の点の間の平均距離誤差(単位はm)です。大きくすると、誤差の大きい点群は除去されません。小さくすると、誤差の小さい点群でも除去されます。初期値:0.0100推奨値:実際のニーズに応じて設定してください。最小平均角度誤差
調整説明:実際の点と、対応する検出された論理的な形状モデル内の点の間の平均角度誤差(単位はm)です。大きくすると、誤差の大きい点群は除去されません。小さくすると、誤差の小さい点群でも除去されます。初期値:45.0000推奨値:実際のニーズに応じて設定してください。円柱のパラメータ
円柱の最小半径
調整説明:このパラメータは、円柱半径の最小値(メートル単位)を設定するために使用されます。半径がこの値よりも小さい円柱はフィルターで除去されます。初期値:0.0100推奨値:実際のニーズに応じて設定してください。円柱の最大半径
調整説明:このパラメータは、円柱半径の最大値(メートル単位)を設定するために使用されます。半径がこの値よりも大きい円柱はフィルターで除去されます。初期値:0.1000推奨値:実際のニーズに応じて設定してください。円柱の面の形状パラメータを最適化するか
調整説明:このパラメータは、円柱形状のパラメータ(中心点と軸)を最適化するかどうかを決定します。初期値:False推奨値:チェックを入れる