visual_pallet_pattern¶
Description¶
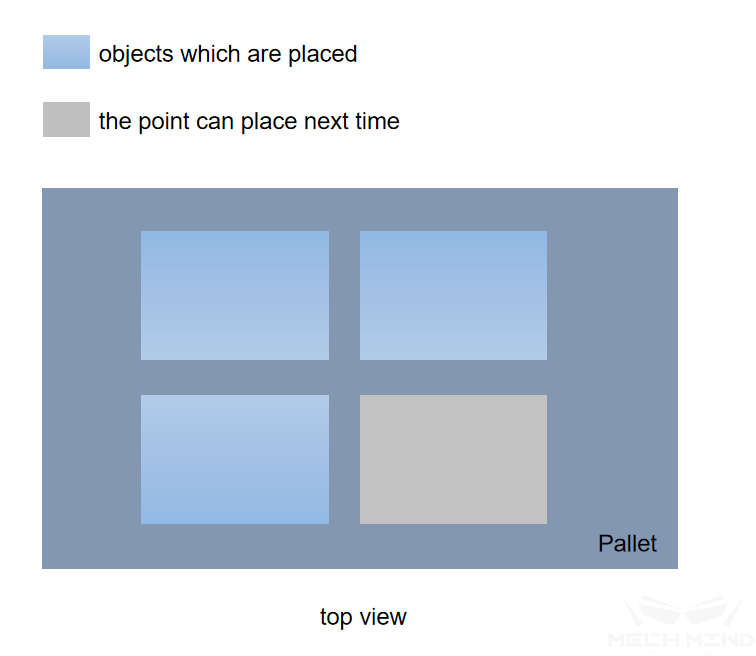
Based on the function of smart_pallet_pattern , visual_pallet_pattern recognizes pose of the uppermost object based on visual recognition, matches it with the known pallet pattern, locates the position of the stack, and obtains the position and entry path to be placed this time.
Parameters¶
Since the function of visual_pallet_pattern is based on smart_pallet_pattern, the setting for pallet pattern parameters see smart_pallet_pattern
xyTolerance Tolerance of x and y directions for visual position and stacked position, unit is m.
zTolerance Tolerance of z directions for visual position and stacked position, unit is m.
rotZTolerance Rotation tolerance value of visual position and stacked position around Z axis, unit is °;
Note
If the above tolerance values are all within the preset range, the pose given by the vision can be seemed same as the stacked pose
visionName It is used to identify the vision project name for the stack. The default is vision3d, which can be manually modified.
needCapture True is selected by default. When the program proceed to this Task, it will take a picture to identify the pallet pattern, and it will be automatically set to False after recognition; the principle is as follows:
When the camera takes a picture of the stacked object (half stack), set this item to False, at this time, identify the pose of uppermost and match the pallet pattern, calculate the pose to be stacked based on the known pose, and set this item back to True.
Therefore, if a new half stack is changed during the process, it is required to be manually set to True for the picture recognition.