Robot Configurations¶
Axes |
Six |
Six |
|||
Types of Configuration |
Name |
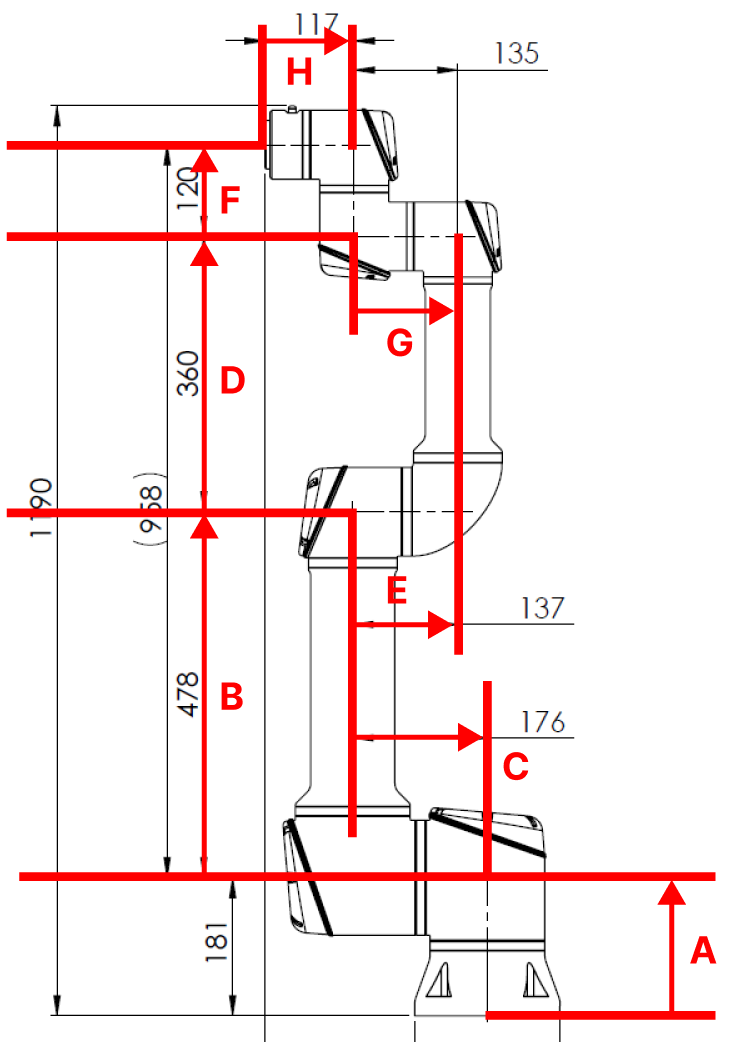
UR_UR5_Like |
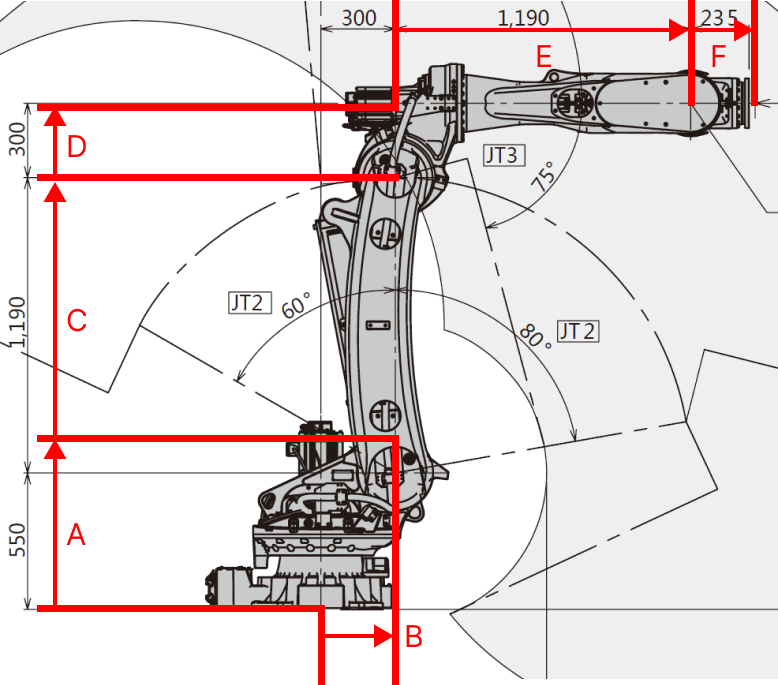
SphericalWrist_SixAxis |
||
Description |
6 axis collaborative robot |
Common split-ball type wrist industrial robot |
|||
Illustrations |
DH Specification |
|
|
||
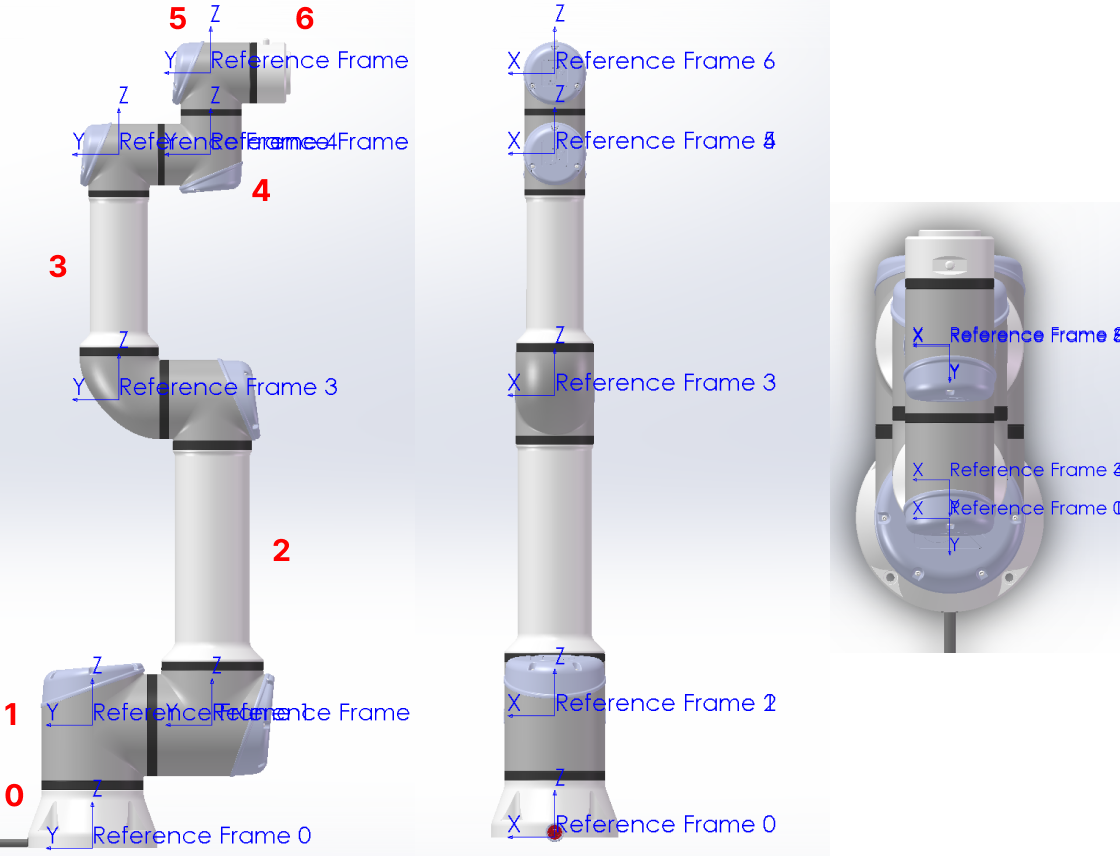
Reference frame and axis No. |
|

|
|||
Interpretation |
0: Reference frame 10; 1: Reference frame 10; 2: Reference frame 2; 3: Reference frame 3; |
4: Reference frame 4; 5: Reference frame 5; 6: Reference frame 6; |
0: Reference frame 10; 1: Reference frame 10; 2: Reference frame 2; 3: Reference frame 3; |
4: Reference frame 4; 5: Reference frame 5; 6: Reference frame 6; |
|
[robot]_algo example |
{
"algo_type": "UR_UR5_Like",
"robot_type": "UR_16E",
"dh": [ A, B, D, G, F, H ],
"shoulder_offset": C,
"elbow_offset": E,
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
{
"algo_type": "SphericalWrist_SixAxis",
"robot_type": "KAWASAKI_CX110L",
"dh": [ A, B, C, D, E, F ],
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
|||