Notes for OBJ Collision Models¶
Table 1
Source of the OBJ Model |
Output using the STL to OBJ script |
Export by the Model Editor |
Legality (Whether it is an assembly of convex polyhedra) |
Legal |
Legal |
Identifier in the file |
None |
mmind_convex 1.6.1 |
How to use models from Mech-Viz project 1.6.0 in 1.6.1 |
Re-import |
Run the project directly |
How to use models from Mech-Viz of versions before 1.6.0 in 1.6.1 |
Re-import |
NA (There is no model editor in Mech-Viz of versions before 1.6.0) |
Table 2
Source of the OBJ Model |
OBJ file converting tool |
Export by other software |
Legality (Whether it is an assembly of convex polyhedra) |
May not be legal |
May not be legal |
Identifier in the file |
mmind_convex script |
None |
How to use models from Mech-Viz project 1.6.0 in 1.6.1 |
Re-import |
Re-import |
How to use models from Mech-Viz of versions before 1.6.0 in 1.6.1 |
NA (Models of this source were not used in Mech-Viz of versions before 1.6.0) |
Re-import |
Note
“Re-import” refers to adding the collision detection model again in and convert the OBJ model following the instructions in the pop-up window.
The shape of the model may change after re-importing. In this case, please use Blender or Model Editor in Mech-Viz to edit the models that are not entirely composed of convex polyhedra before importing to make sure that they can meet the requirement.
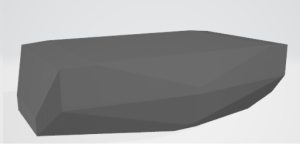
Original Model
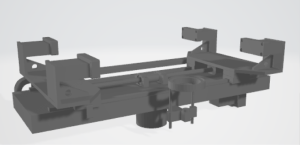
Converted Model