视觉结果用尽¶
功能描述
检查所选的 视觉移动 中的视觉结果是否用完,仅起检查作用。
提示
视觉移动 参数中的的 复用视觉结果 勾选为 True 时才可使用。
使用场景
为节省机器人节拍,且 视觉移动 中有多个结果时,机器人根据 视觉移动 结果,实现重复抓取动作。
此时使用该技能,检查视觉结果是否用完,判断机器人接下来的动作。
参数说明
应用示例
拆垛流程中通常拍照一次,抓取整层纸箱,通过 视觉结果用尽 判断 视觉移动 中的结果是否用完。示例效果如下。
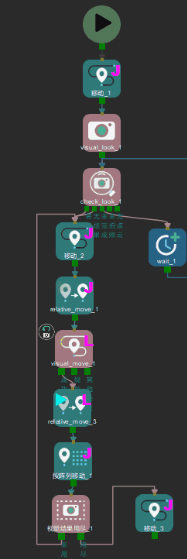
视觉结果 未用尽:重复抓取动作,
移动_2 → relative_move_1 → visual_move_1 → relative_move_3 → 按阵列移动_1 → 视觉结果用尽。视觉结果 用尽:机器人走 用尽 出口。