更新被抓物体¶
功能描述
更新被抓物体的位姿和尺寸。
使用场景
被抓物体需要跟随机器人进行碰撞规避。
提示
仅支持被抓物体是长方体;位姿默认在上表面正中心,不可调整。
该功能会打断规划。
参数说明
- 非移动任务基本参数:
详见 非移动任务基本属性 。
- 修正方式——修正信息来源:
分为 从参数设置 与 从视觉服务 两种。
从参数设置:
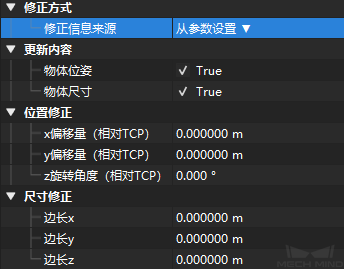 通过设定数值,在指定位置设置被抓长方体的尺寸和其在TCP坐标系下的位置。
通过设定数值,在指定位置设置被抓长方体的尺寸和其在TCP坐标系下的位置。物体位姿:
False:默认值。不调节物体位姿。
True:调节物体位姿,通过调节 位置修正 中的参数值更新。
物体尺寸:
False:默认值。不调节物体尺寸。
True:调节物体尺寸,通过调节 尺寸修正 中的参数值更新。
从视觉服务:
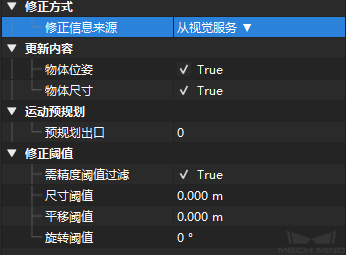 通过二次拍照的形式,重新估计机器人抓取的长方体的尺寸和在 TCP 坐标系下的位置。更新被抓物体位置时,视觉工程需要给出 TCP 坐标系下的坐标。通过视觉服务更新被抓物体,可以与 分类 和 混合码垛 中特定功能配合使用。
通过二次拍照的形式,重新估计机器人抓取的长方体的尺寸和在 TCP 坐标系下的位置。更新被抓物体位置时,视觉工程需要给出 TCP 坐标系下的坐标。通过视觉服务更新被抓物体,可以与 分类 和 混合码垛 中特定功能配合使用。更新内容:
物体位姿:
False:不调节 TCP 坐标。
True:默认值。如机器人识别 TCP 坐标有更新,自动更新至工程中。
物体尺寸:
False:不调节长方体尺寸。
True:默认值。如机器人识别抓取的长方体尺寸有更新,自动更新至工程中。
运行预规划:
预规划出口:
0:如果二次拍照得出的结果偏差小于限定的修正阈值,走 无需更新 输出出口,按照预规划的路径完成任务。
1:如果结果偏差大于修正阈值,则软件会根据新的结果重新规划,走 更新 输出出口。
2:如果视觉异常,走 异常 输出出口。
修正阈值:
需精度阈值过滤:
TRUE:默认值。设置精度过滤值,通过 尺寸阈值 、 平移阈值 与 旋转阈值 共同确认。
False:不设置精度阈值过滤。