ビジョン処理による継続パレタイジング¶
機能¶
ビジョン処理による認識 ステップによってパレットに配置された箱を確認し、事前計画したパレットパターンに基づいて続けてパレタイジングします。
ヒント
事前計画パレットパターン 、カスタマイズのパレットパターン ステップと合わせて使用します。混載パレットパターン と合わせて使用することができません。
使用シーン¶
対象物を一部配置しましたがまだ終わっていないパレットに使用します。
パラメータ¶
- 移動ステップの共通パラメータ
詳しくは 移動ステップの共通パラメータ をお読みください。
- 指定されたパレットパターン
パレットパターンを生成する 事前計画パレットパターン または カスタマイズのパレットパターン ステップを選択します。
すると ビジョン処理による継続パレタイジング ステップは上記のステップによって生成されたパレットパターンを使用します。
ビジョン処理の結果によるマッチング
- 物体XYオフセットのしきい値
事前計画パレットパターンの箱とビジョンサービスによって認識された箱が XY 方向に沿うオフセットの最大値です。
- 対象物Z方向に沿う偏差距離
事前計画パレットパターンの箱とビジョンサービスによって認識された箱が Z 方向に沿うオフセットの最大値です。
- 対象物がZ軸を中心に回転するしきい値
事前計画パレットパターンの箱とビジョンサービスによって認識された箱が Z 方向に回転するオフセットの最大値です。
- 対称性マッチング
ビジョンサービスから提供された箱の位置姿勢の向きとマッチングするパレットパターンの箱の向きが一致しないために失敗する問題を解決できます。
自動:初期値。
対称性無し:対称性を使用しません。
2回対称:長方形に使用します。
4回対称:正方形に使用します。
位置姿勢の補正
- 位置姿勢補正設定
ビジョン処理の結果によるマッチング 実行後、箱の平均偏差に基づいてパレットパターンを補正します。
全てを補正:並進と回転をともに補正します。
並進だけを補正
回転だけを補正
判断条件
- 物体のラベル
ビジョンサービスから受信した箱のラベルによって物体をフィルタリングします。指定したラベルの物体にのみ ビジョン処理の結果によるマッチング を実行します。
ラベルを設定しないと、ビジョンサービスによって認識された箱は全部パレットパターンのマッチングに使用されます。
- 配置された対象物の順序をチェック
デフォルトではチェックが入っています。継続パレタイジングを実行する時に配置済み箱の順序をチェックします。
継続パレタイジング番号:連続する番号でなければなりません。また、番号 1 は空ではありません。要件を満たさない時にプロンプトメッセージが表示されます。
例:下図に示すように、10 個の箱がある段に対し、把持する順番を計算します。
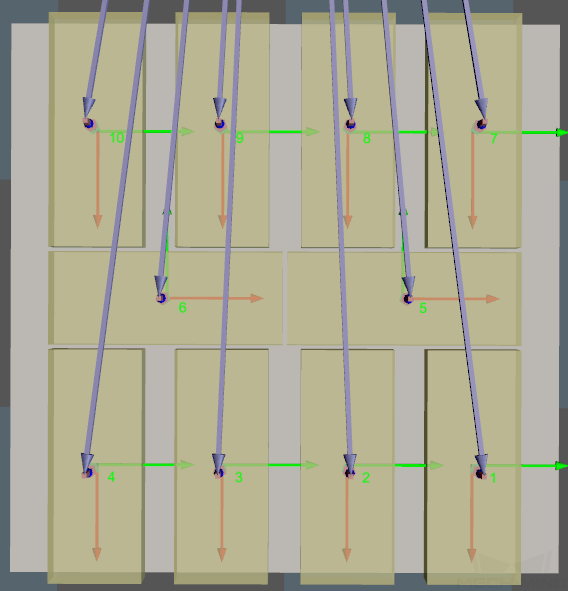
番号 1 に箱がまだ配置されず、2 と 3 には箱が配置されています。するとプロンプトメッセージが表示されます。
番号 1、2、3、4、6 に箱が配置され、5 には箱が配置されていません。するとプロンプトメッセージが表示されます。
番号 1 から箱が連続して配置されている場合に正常に実行できます。