パレタイジングステップの共通パラメータ¶
インデックス
- 開始インデックス
説明:これから配置する箱のインデックス。
値:整数にしか設定できません。初期値は 0。
使用方法:空のパレットの場合に 0 に設定します。パレタイジングを継続するとき、N 個の箱を配置した場合に値をN に設置します。これで N+1 個目の箱からパレタイジングを継続します。
- 現在のインデックス
箱の位置を表示します。値が N であれば、N+1 個目に配置する箱を表示します。
値:整数。自動的に読み取ります。外部コマンドを受信した場合、コマンドに従って更新します。
パレットパターンの基本設定
- 経路を非表示
:初期値、箱の進入経路を表示します。
:箱の進入経路を非表示します。
- 対象物の数
パレット上の配置可能な対象物の数。編集できません。
動作制御
- 開始段階の強制関節運動
- 進入/調整/配置段階の強制関節運動
- 加速度・速度のスケーリング比例
調整範囲:0~100%。初期値: 100%。
使用シーン:ロボットがパレットに近づく時と箱を配置する時の速度が異なる場合に使用します。
説明:箱を配置する時の加速度・速度。
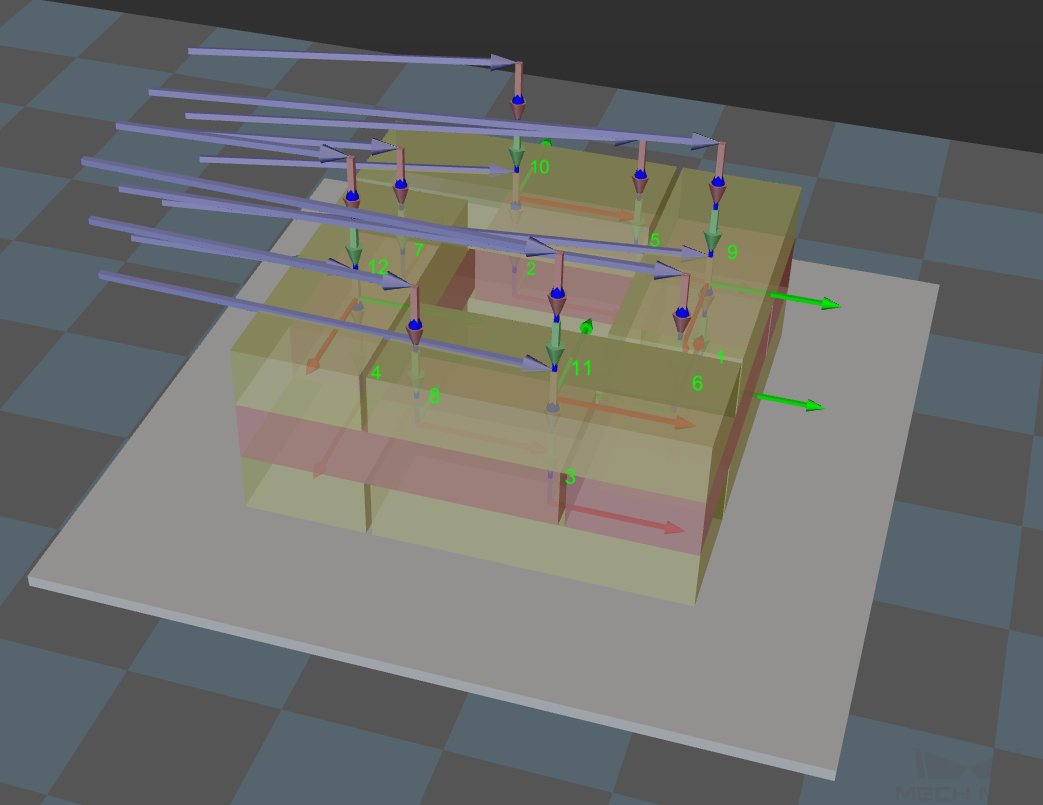
パレットに近づく 3つの段階:
一段階目:紫(パレットに近づく)二段階目:ピンク(箱を配置)三段階目:緑(箱を配置)パレットに近づく速度と加速度は 基本的な移動設定 で指定されたあと、二、三段階目の速度/加速度は 加速度・速度 × 加速度・速度のスケーリング比例。
進入と調整
調整説明:3つのパラメートを設定して箱がパレットに進入する経路を指定します。箱が配置済みの箱の山に近づいてから垂直方向に沿って配置するような進入経路を調整します。これによって他の箱との衝突を回避できます。
箱にはパレットに進入する位置は 4つあります。このパラメータはその中の entry と adjust、place の 3つを調整します。
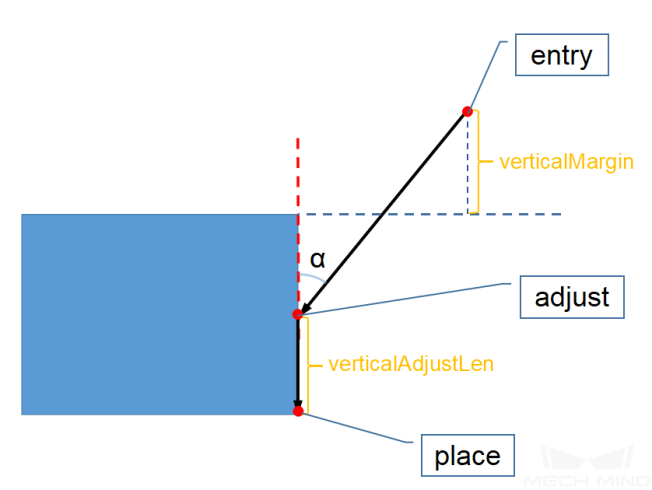
- 垂直方向に長さの比例を調整
説明:調整する点(adjust)の位置を影響します。
値 = verticalAdjustLen / 箱の高さ
調整範囲:0~1
推奨値: 0.5
- 垂直方向の範囲
説明:進入点(entry)の位置を指定します。
値 = 高さの範囲。
調整範囲:0 ~ 無限大、単位:mm。
- Z 方向の進入角度
説明:
調整範囲:-80°~80°
推奨値:30°~45°
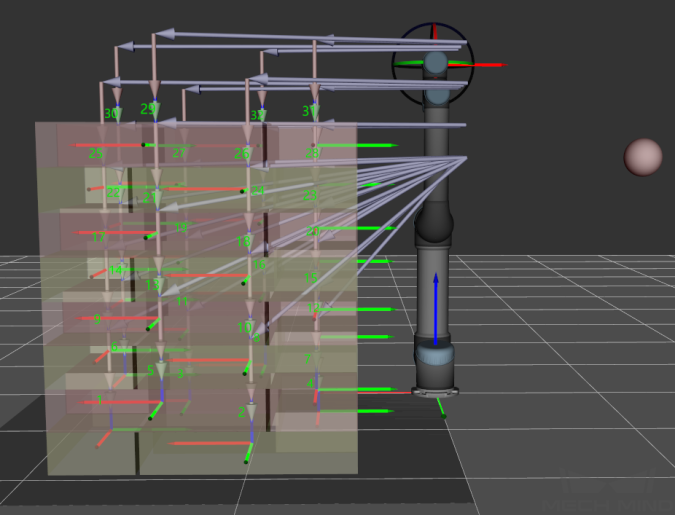
自動中間点
- X/Y
ロボットベース座標系におけるピンクのボールの位置 x と y を指定します。この位置によって適切な中間点座標が算出されます。
- 最小 Z 高さ
ロボットがパレットに進入する(紫の経路)時に Z 方向の最小絶対高さ(Z 方向高さはこの段の高さの差)。
- 垂直な中間点の進入経路
- 進入段階の延長距離
使用シーン:グリッパが大きくて、進入段階が長いほど衝突発生確率は高くなる恐れがある現場に使用できます。
注意
自動中間点 はパレットに進入する方向だけを指定し、ロボットが到達する目標点を指定しないので、できるだけピンクのボールをパレットから遠ざけてください。
ビジョン処理によるパレットの位置を調整
説明:ビジョン処理による認識 を使用してパレットの位置を調整します。
- ビジョン処理を使用してパレット位置を調整します。
- ビジョンサービス名
パレット位置を認識する Mech-Vision プロジェクト名( ビジョン処理による認識 )を選択します。

ヒント
パラメータは外部設定(adapter)による調整も可能です。