비전 프로젝트 구성
이 단계에서는 대상 물체의 인식 및 위치 지정을 실현하기 위해 비전 프로젝트(즉 Mech-Vision 프로젝트)의 구성을 완료해야 합니다.

| 프로젝트가 피킹 정확도에 대한 요구 사항이 높으면 프로젝트를 배포할 때 주제: 피킹 정확도 향상 내용을 참조하여 요구 사항을 충족할 수 있도록 피킹 정확도를 향상시켜야 합니다. |
비전 프로젝트에는 이미지 수집부터 시작하여 이미지 데이터에 대한 일련의 알고리즘 프로세스(포인트 클라우드 사전 처리, 포인트 클라우드 후처리, 3D 매칭, 포즈 조정, 딥 러닝 추론 등)를 거쳐 일련의 비전 처리 단계가 포함됩니다. 마지막으로 로봇을 가이드하는데 사용되는 비전 결과(포즈, 레이블 등)를 출력합니다.
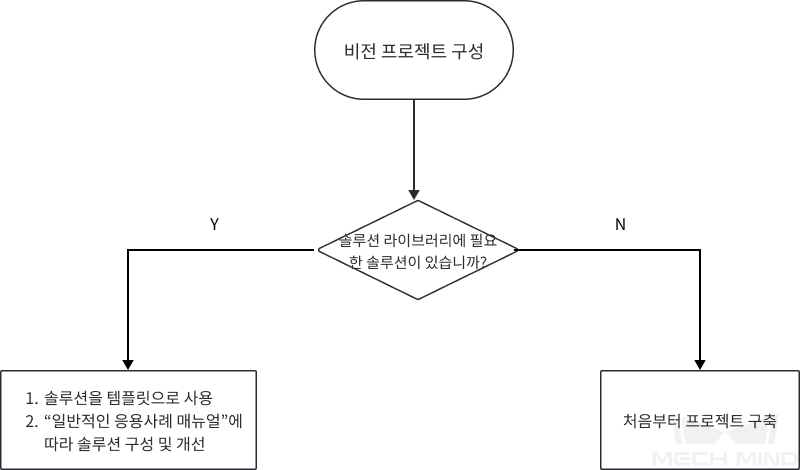
일반적인 응용 시나리오의 경우 비전 프로젝트를 처음부터 구축할 필요가 없습니다. 일반적인 공작물 로딩, 팔레타이징&디팔레타이징, 로케이팅/어셈블리, 구즈 피킹, 품질 검사 및 기타 산업 분야의 일반적인 응용 시나리오에 대해 Mech-Vision 소프트웨어의 "솔루션 라이브러리"는 일반적인 솔루션 프로젝트를 제공합니다. 이러한 솔루션 프로젝트를 프로젝트 템플릿으로 직접 사용하여 비전 프로젝트를 신속하게 생성, 구성 및 조정할 수 있습니다. "3D 비전 시스템의 일반적인 솔루션 사례" 매뉴얼은 비전 프로젝트 구성 및 조정에 대한 자세한 지침을 제공합니다.
솔루션 라이브러리에 포함되지 않은 경우에는 처음부터 프로젝트를 구축하고 구성 및 조정해야 합니다. 비전 프로젝트를 구성하는 방법의 프로세스는 아래 그림에 나와 있습니다.

1 프로젝트 구축 |
간단한 프로젝트를 구축하는 프로세스와 구체적인 방법을 소개합니다. |
|
프로젝트의 일반적인 작업을 소개합니다. |
||
스텝의 일반적인 작업을 소개합니다. 스텝은 프로젝트 구성의 기초이며, 하나의 스텝은 한 알고리즘 처리 단위이며 서로 다른 스텝을 결합하여 서로 다른 알고리즘 처리 프로세스를 구성합니다. |
||
2 파라미터 설정 |
카메라 파라미터 조정을 완료하여 캡처한 2D 이미지와 뎁스 맵의 품질이 요구 사항을 충족하도록 하여 비전 프로젝트의 최종 출력 효과를 보장합니다. |
|
3D 매칭 알고리즘은 포인트 클라우드 모델을 기반으로 대상 물체를 인식합니다. 따라서 비전 프로젝트를 구성할 때 일반적으로 포인트 클라우드 모델을 만들어야 합니다. |
||
예를 들어, 공작물의 반사가 심하거나 포인트 클라우드의 퀄리티가 좋지 않은 복잡한 인식 요구 사항이 있는 시나리오에서는 3D 매칭 알고리즘이 최적의 인식 성능을 달성하지 못할 수 있습니다. 이때 딥 러닝 알고리즘은 더 나은 인식 성능을 촉진할 수 있습니다. 딥 러닝 모델을 훈련하고 배포하려면 이 사용자 가이드 내용을 참조하십시오. |
||
대상 물체가 성공적으로 인식된 후에는 로봇이 쉽게 피킹할 수 있도록 포즈에 대한 일련의 처리를 수행해야 합니다. 포즈 조정 도구를 사용하면 포즈를 빠르게 조정할 수 있습니다. |
||
이 가이드 내용을 참조하여 프로젝트의 각 스텝의 파라미터를 조정합니다. |
||
3 디버그&최적화 |
디버그 출력 창에서 실행 결과를 확인하기 위해 각 스텝을 실행하며 프로젝트에서 출력되는 비전 결과를 확인하기 위해 전체 프로젝트를 실행합니다. |
|
딥 러닝이 사용되는 시나리오에서 추론 결과가 만족스럽지 않으면 딥 러닝 모델을 파인튜닝해야 합니다. |
||
향후 유지 관리를 용이하게 하려면 프로젝트 데이터를 정기적으로 백업해야 합니다. |
||
4 생산&유지 관리 |
비전 솔루션이 생산 라인에 전달되어 사용되기 전에 현장 작업자가 생산 상태를 빠르게 파악하고, 생산 결과를 확인하고, 공작물을 전환하거나, 새 공작물 유형을 추가할 수 있도록 일련의 오퍼레이터 인터페이스를 구성할 수 있어 유지보수 및 문제 해결을 쉽게 수행할 수 있습니다. |
|
현장 오퍼레이더는 이 매뉴얼을 참조하여 오퍼레이터 인터페이스 사용 방법을 빠르게 살펴볼 수 있습니다. |