HYUNDAI 캘리브레이션 작업 프로세스
이 부분에서 HYUNDAI 로봇이 Mech-Mind 비전 시스템과 표준 인터페이스로 통신할 때 캘리브레이션 프로세스를 자동으로 완료하는 방법을 소개하겠습니다.
| 이 부분 내용을 시작하기 전에 HYUNDAI 표준 인터페이스 통신 설정 작업을 완료했는지 확인하십시오. |
캘리브레이션 프로그램 열기
-
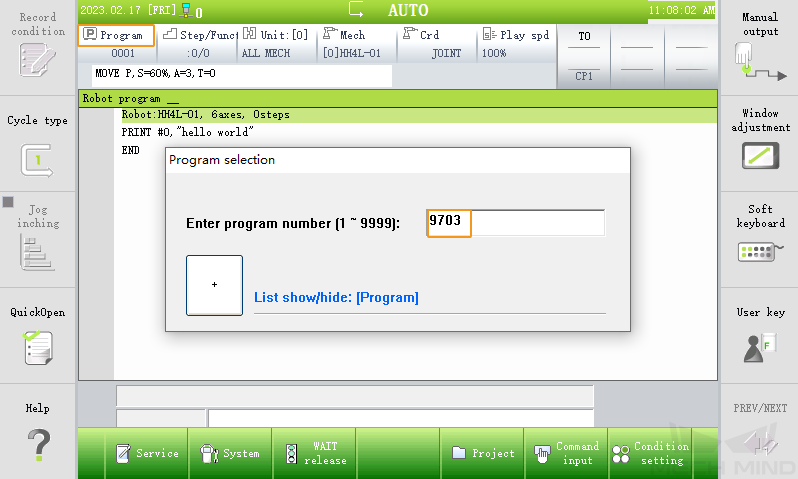
티치 펜던트 화면에서 왼쪽 상단에 있는 Program 구역을 클릭하고 입력 상자에서 9703을 입력하여 9703 캘리브레이션 프로그램을 시작합니다.
-
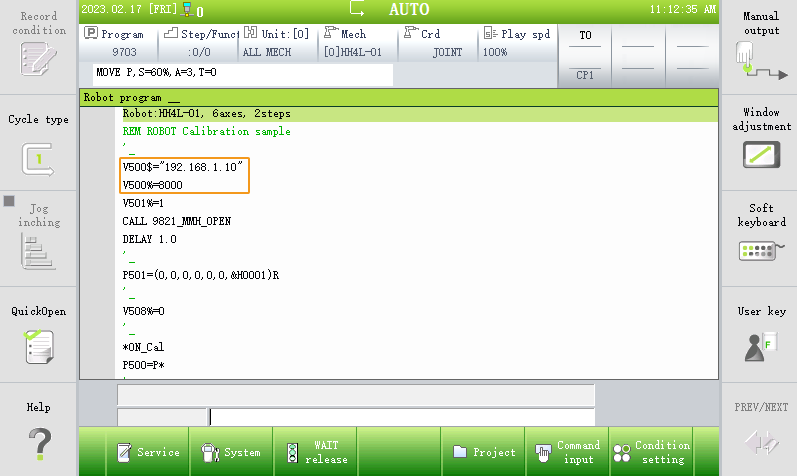
V500$의 값을 IPC의 IP로 수정하고 V500%의 값을 Mech-Vision에서 설정된 포트 번호로 수정합니다.
캘리브레이션 프로그램 실행
-
수동으로 로봇을 캘리브레이션의 시작점으로 이동합니다.
-
노브를 자동 모드로 전환하고 START 버튼을 눌러 로봇 프로그램 9703을 실행합니다. 연결에 성공하면 Mech-Vision 로그 창의 Console 탭 아래에 다음과 같은 내용이 나타납니다: 캘리브레이션 프로세스에 들어갑니다. Mech-Vision에서 캘리브레이션을 시작하십시오.

Mech-Vision에서 캘리브레이션을 수행하기
-
Mech-Vision 소프트웨어를 시작하고 카메라 캘리브레이션(표준) 버튼을 클릭하거나 메뉴 바에서 순서대로 을 클릭하여 캘리브레이션 도구를 엽니다.
-
카메라의 설치 방식에 따라 소프트웨어 프롬프트에 따라 나머지 작업을 완료합니다.
-
카메라 설치 방식이 ETH(Eye to Hand)인 경우 ETH 시나리오에서의 자동 캘리브레이션 프로세스 내용을 참조하십시오.
-
카메라 설치 방식이 EIH(Eye in Hand)인 경우 EIH 시나리오에서의 자동 캘리브레이션 프로세스 내용을 참조하십시오.
-
| 로봇이 60초 이내에 다음 캘리브레이션 포인트 위치에 도달하지 않으면 Mech-Vision 소프트웨어는 시간 초과 오류가 발생합니다. 이때 캘리브레이션 프로그램을 다시 선택하고 실행한 다음 Mech-Vision 소프트웨어의 프롬프트에 따라 캘리브레이션을 다시 시작해야 합니다. |