스캔된 데이터의 Y축 해상도
스캔된 데이터의 Y축 해상도는 대상 물체의 이동 방향을 따라 인접한 두 데이터 포인트 사이의 거리입니다. 이는 인접한 두 프로필 사이의 거리와 같습니다. Y축 해상도는 스캔된 데이터의 정밀도뿐만 아니라 광도 이미지와 뎁스 맵의 종횡비를 결정합니다.
스캔이 트리거되는 속도는 인접한 두 프로필 사이의 거리를 결정하므로 스캔된 데이터의 Y축 해상도를 결정합니다.
라인 스캔 트리거 소스가 다르면 스캔이 트리거되는 속도에 영향을 주는 파라미터도 달라집니다.
-
스캔이 고정된 속도로 트리거되는 경우: 트리거 빈도는 스캔이 트리거되는 속도를 결정합니다.
-
엔코더에 의해 스캔이 트리거되는 경우:트리거 신호 계산 모드 및 트리거 간격이 함께 스캔이 트리거되는 속도를 결정합니다.
파라미터를 통해 Y축 해상도 조정
스캔된 데이터의 Y축 해상도에 대한 특정 요구 사항이 있는 경우 위 파라미터를 조정하여 Y축 해상도를 변경할 수 있습니다.
트리거 빈도
고정 속도로 스캔을 트리거하는 경우, 다음 방정식을 참조하여 필요한 Y축 해상도를 달성하기 위한 트리거 빈도 파라미터의 값을 계산할 수 있습니다.
Y축 해상도(μm) = 레이저 프로파일러를 기준으로 대상 물체의 이동 속도(μm/s) ÷ 트리거 빈도
트리거 신호 계산 모드 및 트리거 간격
엔코더를 사용하여 스캔 과정을 트리거하는 경우, 다음 방정식을 참조하여 필요한 Y축 해상도를 달성하기 위한 트리거 신호 계산 모드 및 트리거 간격 파라미터의 값을 계산할 수 있습니다.
Y축 해상도(μm) = 엔코더 분해능(μm) × 트리거 간격 ÷ 트리거 신호 계산 모드 × 4
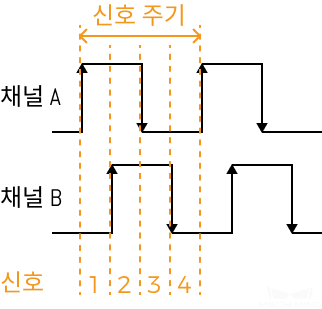
엔코더 분해능은 레이저 프로파일러를 기준으로 아래 그림 속의 각 신호에 해당하는 대상 물체의 이동 거리(단위: μm)입니다.
계산 예시
엔코더 분해능이 4μm이고 필요한 Y축 해상도가 20μm인 경우,
20 = 4 × 트리거 간격 ÷ 트리거 신호 계산 모드 × 4
위의 방정식을 단순화하면 다음을 얻을 수 있습니다. 1.25 × 트리거 신호 계산 모드 = 트리거 간격.
따라서 다음 파라미터 값은 기본적으로 Y축 해상도 요구 사항을 충족할 수 있습니다.
| 트리거 신호 계산 모드 | 트리거 간격 |
|---|---|
1× |
1.25 (1 또는 2로 반올림) |
2× |
2.5(2 또는 3으로 반올림) |
4× |
5 |