Mech-Eye SDK 2.5.4 更新説明
以下では、Mech-Eye SDK 2.5.4 バージョンの新機能や機能最適化、問題修復について説明します。
Mech-Eye Viewer
ウォームアップツール追加
Mech-Eye Viewer 2.5.2 バージョンにはウォームアップツールを追加しました。この機能により、データ収集の前にカメラをウォームアップしてより安定して高精度なデータを取得できます。
NANO ULTRA:反射物のコーディングモードに値を追加
その中、より速いを選択すれば 2.5.1 バージョンの効果と速度とはほぼ同じです。より完全を選択するとより高品質な深度データ、より完全な深度画像と点群を取得できます。コンテナの側面が多重反射するなど、反射が複雑な現場では、より完全を使用することを推奨します。
NANO ULTRA:反射物のコーディングモードで点群補完対応
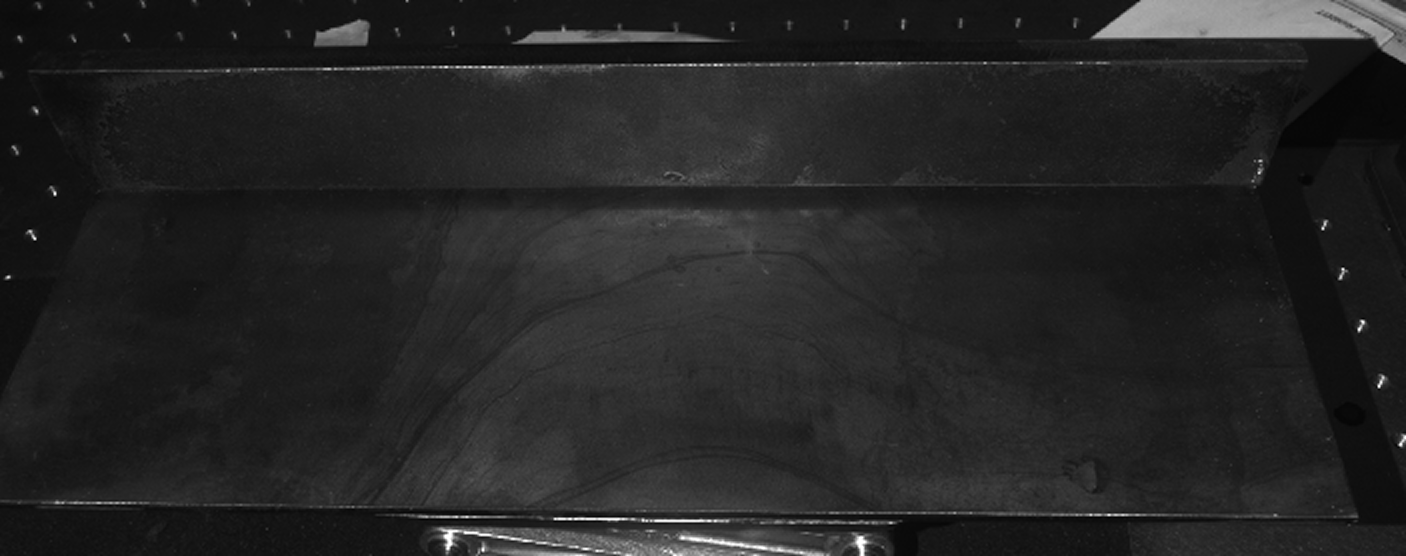
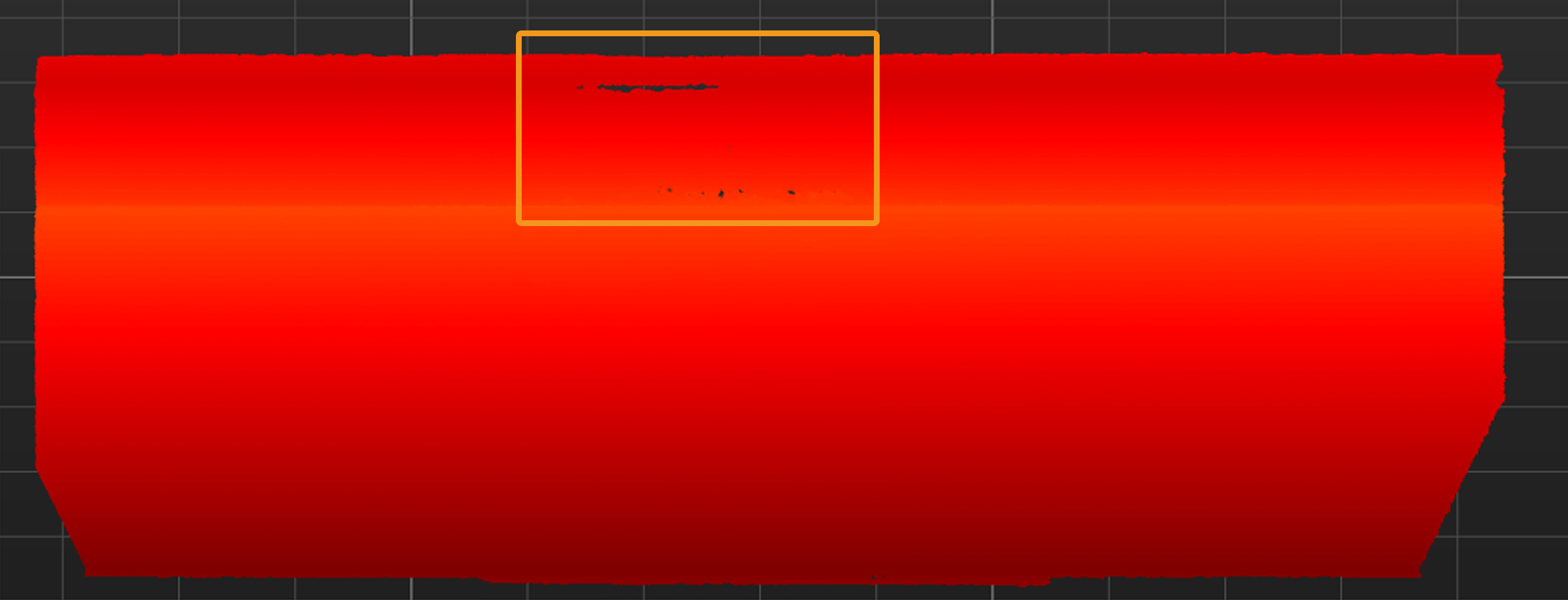
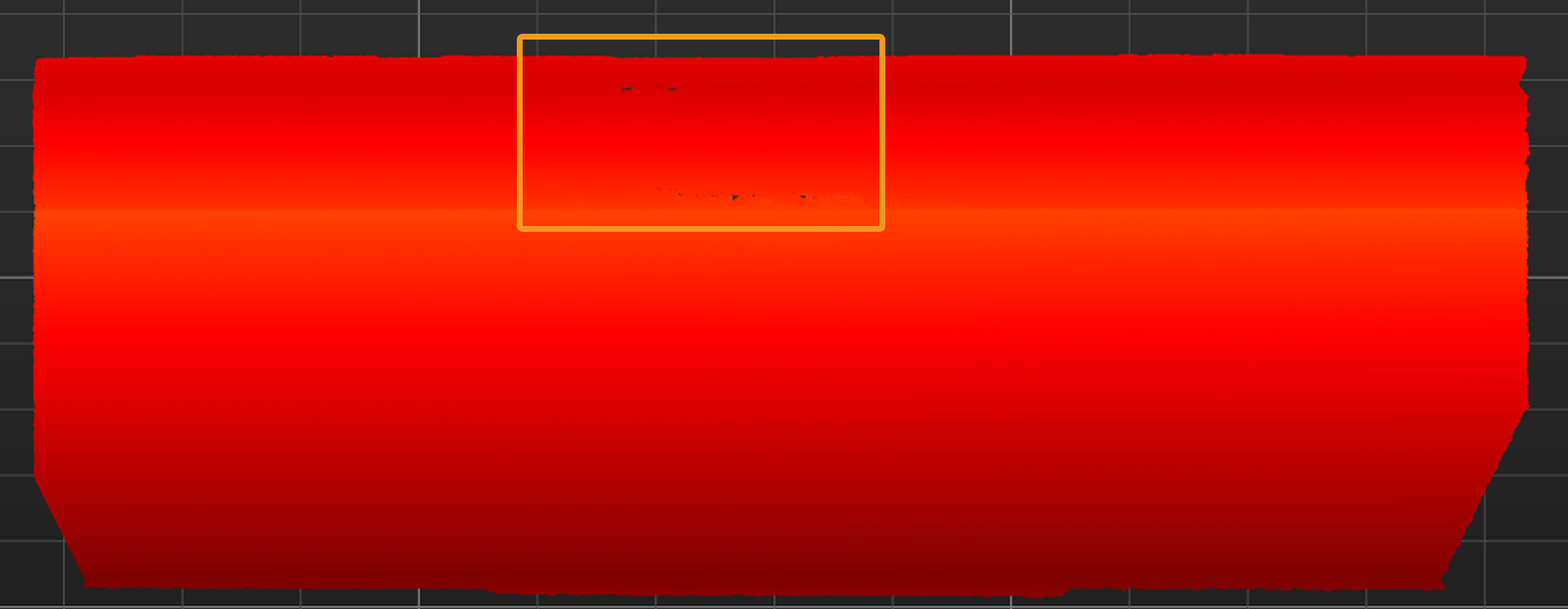
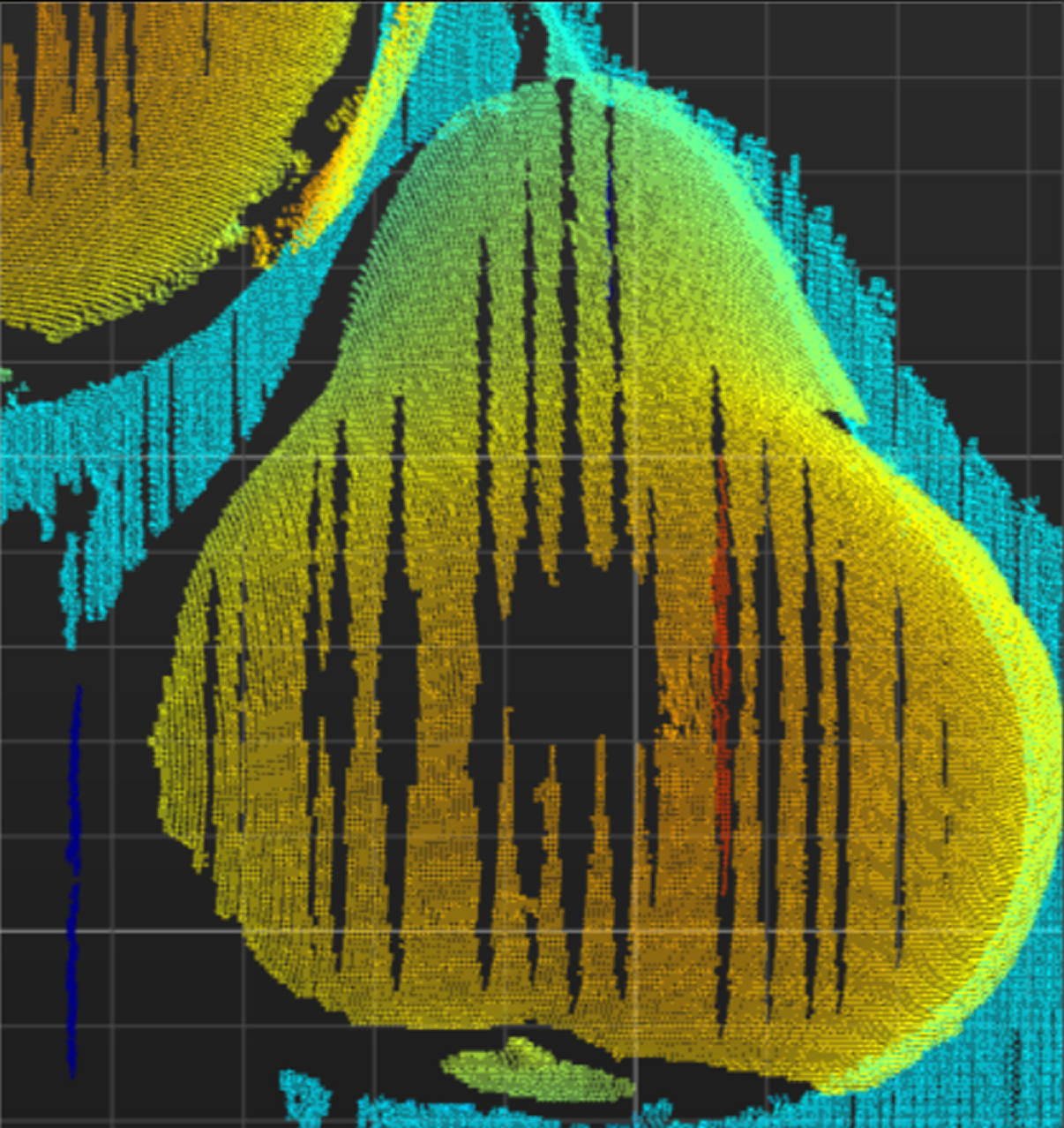
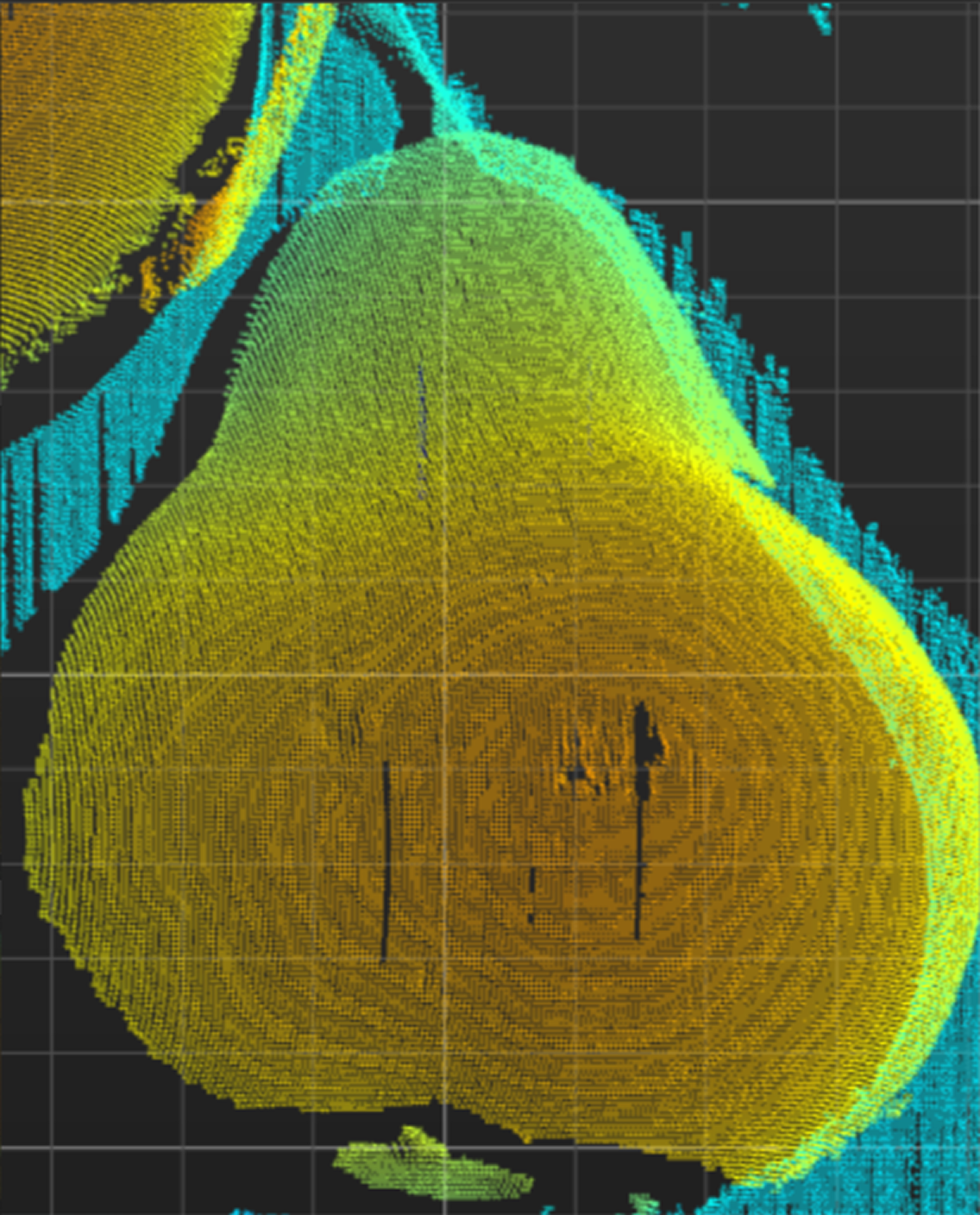
コーディングモードを反射に設定した場合の点群補完を適用パラメータと欠損サイズパラメータを追加しました。これらのパラメータを調整することで点群の欠損を補完してより完全な対象物表面データを取得できます。詳細な説明はパラメータ説明をお読みください。
| 対象物 | 点群補完の前 | 点群補完の後 |
|---|---|---|
|
|
|

PRO S と PRO M カラーカメラ:データ品質向上
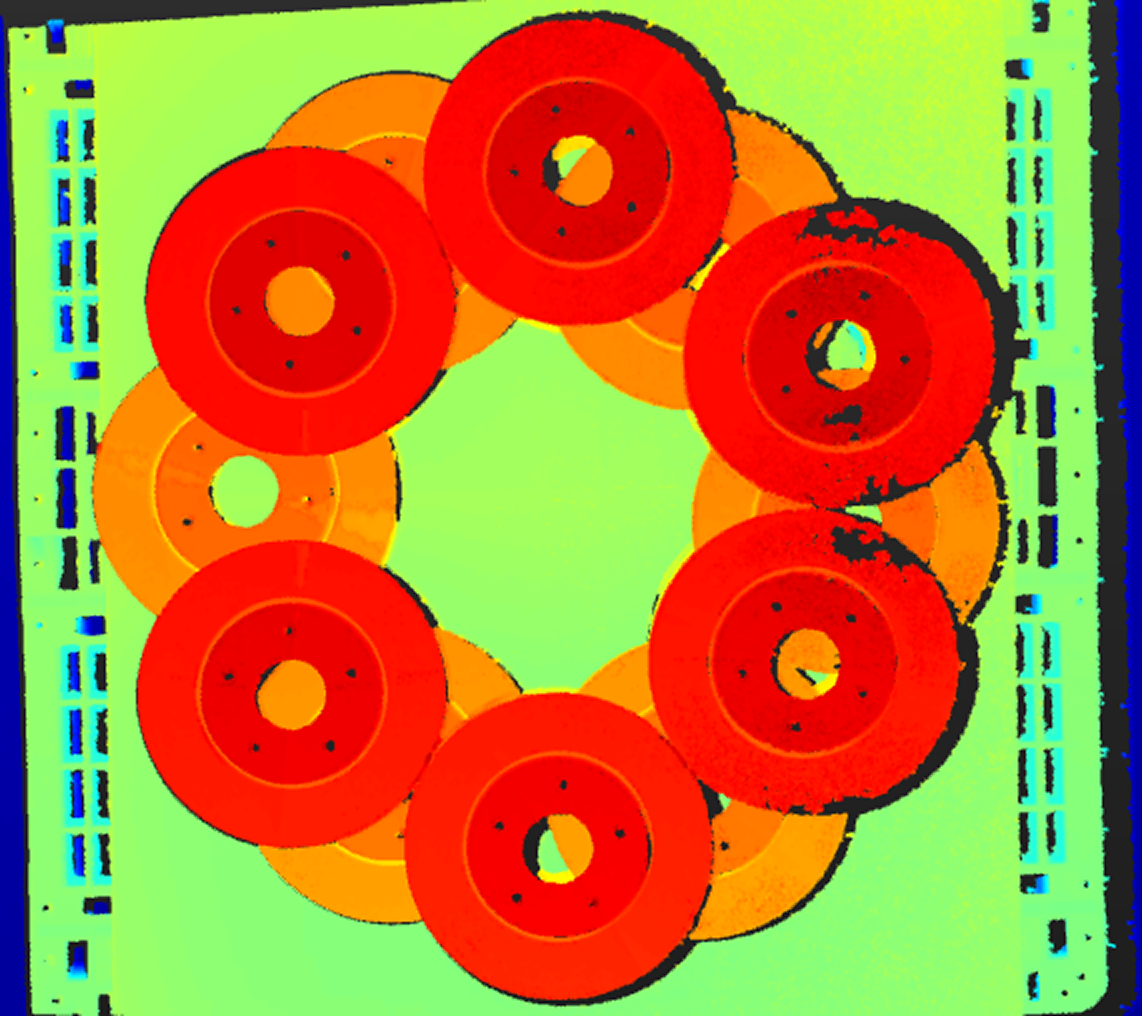
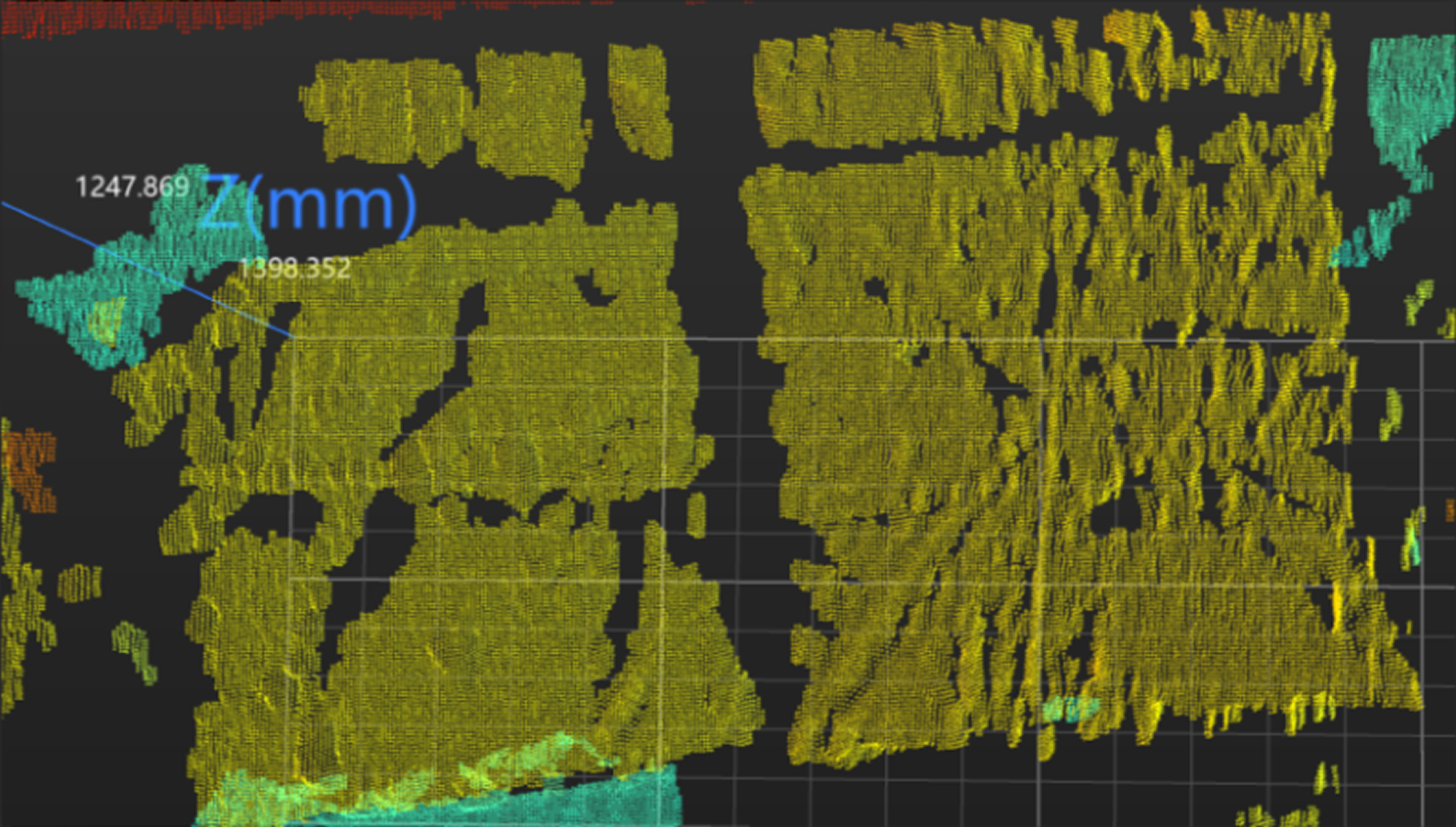
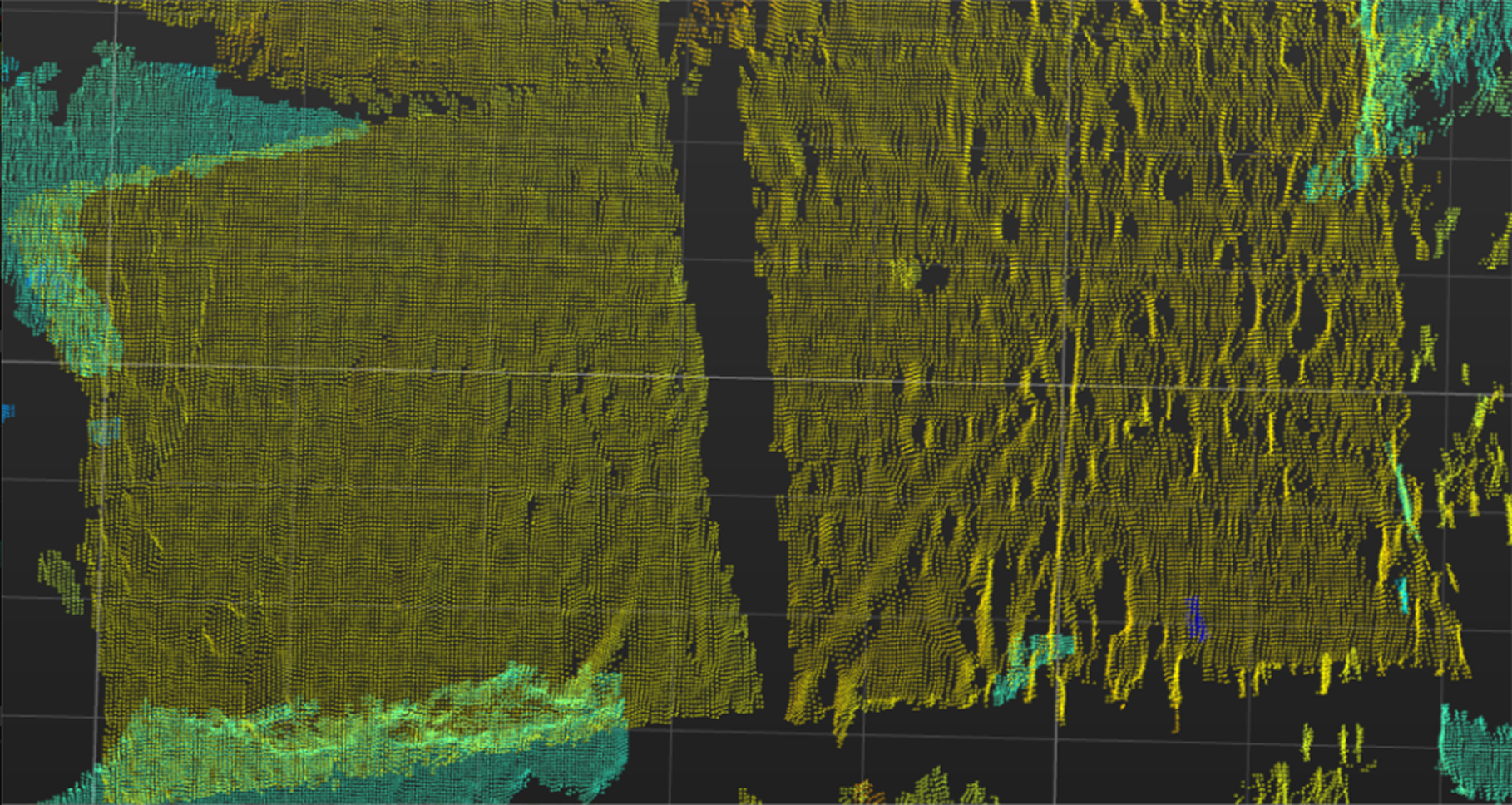
PRO S と PRO M カラーカメラのコーディングモードを高速、精確、反射に設定した時のデータ品質はいずれも向上しました。異なるコーディングモードに設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです:
| 2.5.0 | 2.5.2 | |
|---|---|---|
精確 |
|
|
反射 |
|
|
データを連続的に保存可能
データ保存機能を最適化しました。一回データを収集した後、手動保存を選択してデータをローカルに保存することができます。また、自動保存を選択して毎回収集したデータを自動的に保存することも可能です。
点群 ROI 設定可能
点群表示画面の![]() をクリックすれば点群 ROI 画面が表示されます。点群 ROI を設定することでエリアを指定した点群を確認できます。
をクリックすれば点群 ROI 画面が表示されます。点群 ROI を設定することでエリアを指定した点群を確認できます。
クライアント側のパラメータグループ同期機能の最適化
別のクライアントではパラメータ設定が変更され、またはパラメータグループが切り替えられた時に、使用しているクライアントではその変更は自動的に同期されます。手動で操作する必要がなくてクライアント間の同期を実現します。
一部のカメラ型番に対応不能
Mech-Eye SDK 2.5.2 は PRO XS に対応しなくなりました。このモデルのカメラは、ファームウェアを 2.5.2 以上のバージョンにアップグレードできませんが、2.5.2 以下のファームウェアに対応でき、Mech-Eye SDK にも対応できます。
問題修復
Mech-Eye SDK 2.5.4 バージョンでは以下の問題を修復しました。
-
NANO ULTRA:データ保存機能を使用して保存した画像は2枚とも右図になる問題を修復しました。
-
データ表示エリアでは画像を縮小・拡大、または移動してからデータの種類を切り替えてからまた戻すと調整したスケーリングと移動位置が保存できない問題を修復しました。
-
深度画像グリッドを3 × 3に設定してから Mech-Eye Viewer を終了した後、再度 Mech-Eye Viewer によってカメラを接続すると設定が無効になる問題を修復しました。
-
IPC のインターネット接続を切断すると仮想デバイスが接続できない問題を修復しました。
-
マウスの左ボタンをクリックしたまま点群を回転させ、または点群再生機能を使用する時に回転の中心が点群中心から外れる問題を修復しました。
Mech-Eye API
ウォームアップのためのサンプルプログラム提供
Mech-Eye API 2.5.4 に以下のサンプルプログラムを追加し、デバイスをウォームアップするために使用できます。
C、C++、C# |
WarmUp |
|---|---|
Python |
warm_up |
|
サンプルプログラムは、インストールパスまたは GitHub から入手できます。 各言語の使用ガイドについては、サンプルプログラム使用ガイドをお読みください。 |
NANO ULTRA:Reflective のコーディングモードに値を追加
ProjectorFringeCodingMode(コーディングモード)の Reflective を選択すると新しいパラメータ ProcessingMode(処理モード)が使用できます。
その中、Faster を選択すれば 2.5.1 バージョンの効果と速度とはほとんど変わりませんが、MoreComplete を選択するとより高品質な深度データを取得でき、より完全な深度画像と点群を取得できます。コンテナの側面が多重反射するなど、反射が複雑な現場では、MoreComplete を使用することを推奨します。
NANO ULTRA:Reflective のコーディングモードで点群補完に対応
ProjectorFringeCodingMode(コーディングモード)パラメータを Reflective に設定した場合の EnableGapFilling(点群補完を適用)と GapSize(欠損サイズ)パラメータを追加しました。これらのパラメータを調整することで点群の欠損を補完してより完全な対象物表面データを取得できます。詳細な説明はパラメータ説明をお読みください。
| 対象物 | 点群補完の前 | 点群補完の後 |
|---|---|---|
|
|
|
PRO S と PRO M カラーカメラ:データ品質向上
PRO S と PRO M カラーカメラの ProjectorFringeCodingMode(コーディングモード)パラメータを高速、精確、反射に設定した時のデータ品質はいずれも向上しました。異なるコーディングモードに設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです:
| 2.5.0 | 2.5.2 | |
|---|---|---|
精確 |
|
|
反射 |
|
|
問題修復
Mech-Eye SDK 2.5.4 バージョンでは以下の問題を修復しました。
-
深度画像アナライザーを使用して線を引いて対象物を変えたら右のエリアで表示される深度データが変わらない問題を修復しました。
-
深度範囲を設定ウィンドウで深度範囲を調整してキャンセルをクリックしたあと、メイン画面の深度範囲の下限と上限パラメータ値が変わる問題を修復しました。
-
以下のサンプルプログラムを実行している間にデバイスの接続を切断するとデータ収集が失敗しましたがデータが続けて保存される問題を修復しました。
C++、C#
CapturePeriodically
Python
capture_periodically
GenICam インターフェース
NANO ULTRA:Reflective のコーディングモードに値を追加
ProjectorFringeCodingMode(コーディングモード)の Reflective を選択すると新しいパラメータ ProcessingMode(処理モード)が使用できます。
その中、Faster を選択すれば 2.5.1 バージョンの効果と速度とはほとんど変わりませんが、MoreComplete を選択するとより高品質な深度データを取得でき、より完全な深度画像と点群を取得できます。コンテナの側面が多重反射するなど、反射が複雑な現場では、MoreComplete を使用することを推奨します。
NANO ULTRA:Reflective のコーディングモードで点群補完に対応
ProjectorFringeCodingMode(コーディングモード)パラメータを Reflective に設定した場合の EnableGapFilling(点群補完を適用)と GapSize(欠損サイズ)パラメータを追加しました。これらのパラメータを調整することで点群の欠損を補完してより完全な対象物表面データを取得できます。詳細な説明はパラメータ説明をお読みください。
| 対象物 | 点群補完の前 | 点群補完の後 |
|---|---|---|
|
|
|
PRO S と PRO M カラーカメラ:データ品質向上
PRO S と PRO M カラーカメラの ProjectorFringeCodingMode(コーディングモード)パラメータを高速、精確、反射に設定した時のデータ品質はいずれも向上しました。異なるコーディングモードに設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです:
| 2.5.0 | 2.5.4 | |
|---|---|---|
精確 |
|
|
反射 |
|
|