PRO S と PRO M パラメータ
本節では、PRO S と PRO M カメラのパラメータについて説明します。これらのパラメータを調整することで 2D 画像と深度画像、点群の品質を向上させます。
概要
2D 画像や深度画像、点群の品質に影響するパラメータグループは以下に示します。
| パラメータグループ | 2D 画像 | 深度画像 | 点群 |
|---|---|---|---|
|
|||
(1) |
|
|
|
|
|||
|
|
||
|
|
(1) 3D パラメータグループのカメラのゲインは、2D 画像の品質に影響する恐れがあります。
パラメータ調整の目的は、より高品質の 2D 画像と深度画像、点群を取得することです。データの標準は以下の通りです。
-
2D 画像の輝度が適切で、対象物の表面のディテールがはっきり見えるようにします。
カラーカメラで撮影する場合、現場の照明などの影響で実際の画像の色と大きく異なる場合は、ホワイトバランスを調整してください。詳しくはホワイトバランス調整をお読みください。 -
深度画像と点群:データが完全でなければなりません。
必要なデータの範囲を決めておいてください。例えば、上向きに配置された金属ボウルの端をつかむ場合、金属ボウルの端のデータを取得すればいいです。
1. 2D パラメータ
1.1. 露出モード
パラメータ説明 |
2D 画像を撮影するときに使用する露出モードを設定する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
|
調整説明 |
露出モードを指定すると、2D パラメータには異なるパラメータが表示される
|
1.1.1. Timed:露出時間
パラメータ説明 |
画像の輝度に影響を与える
|
|---|---|
可視性 |
初級、専門、グル |
オプション |
0.1~999ms |
調整説明 |
2D 画像の品質に応じて調整する。2D 画像の輝度が適切で、対象物の表面のディテールがはっきり見えるようにする
|
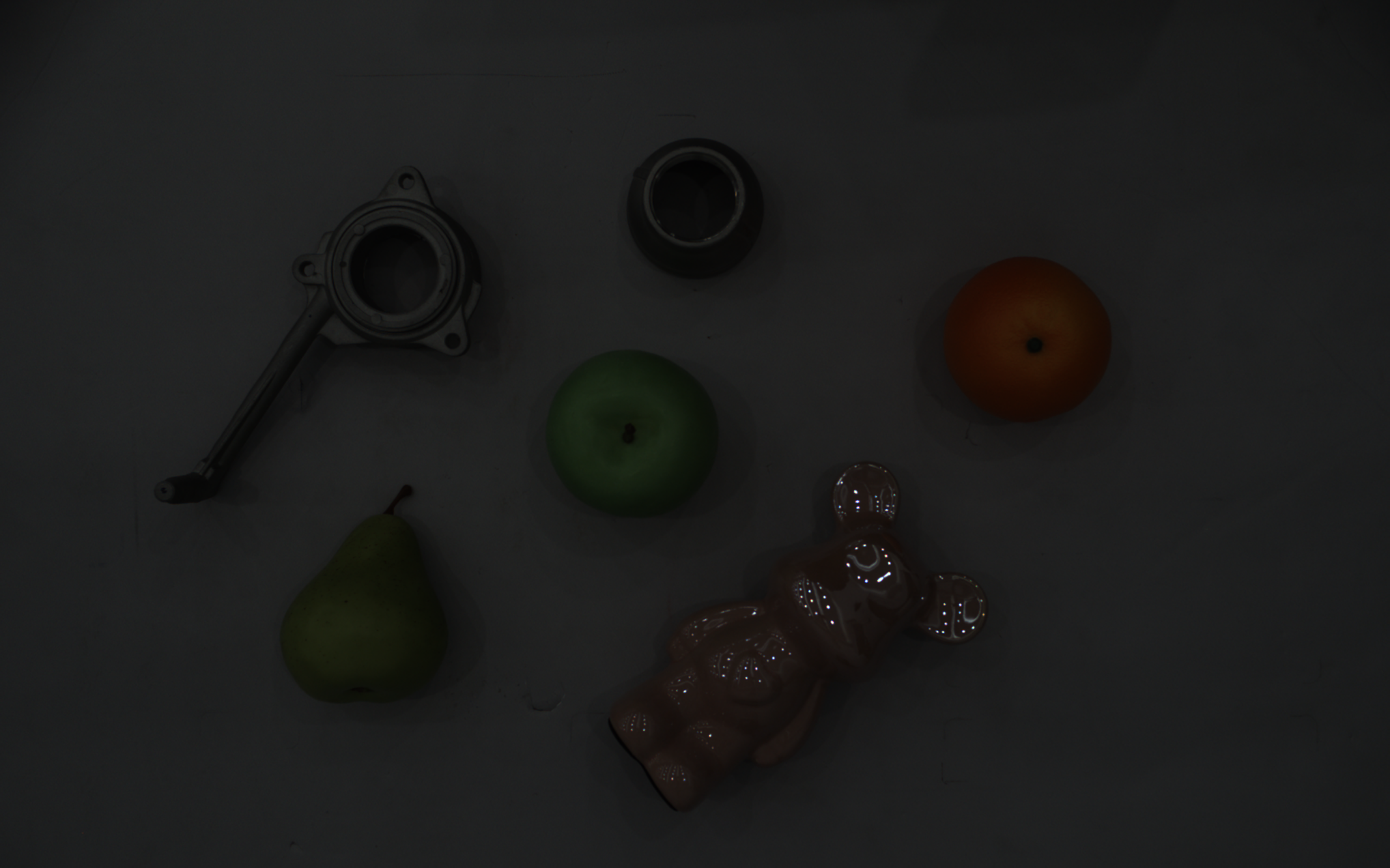
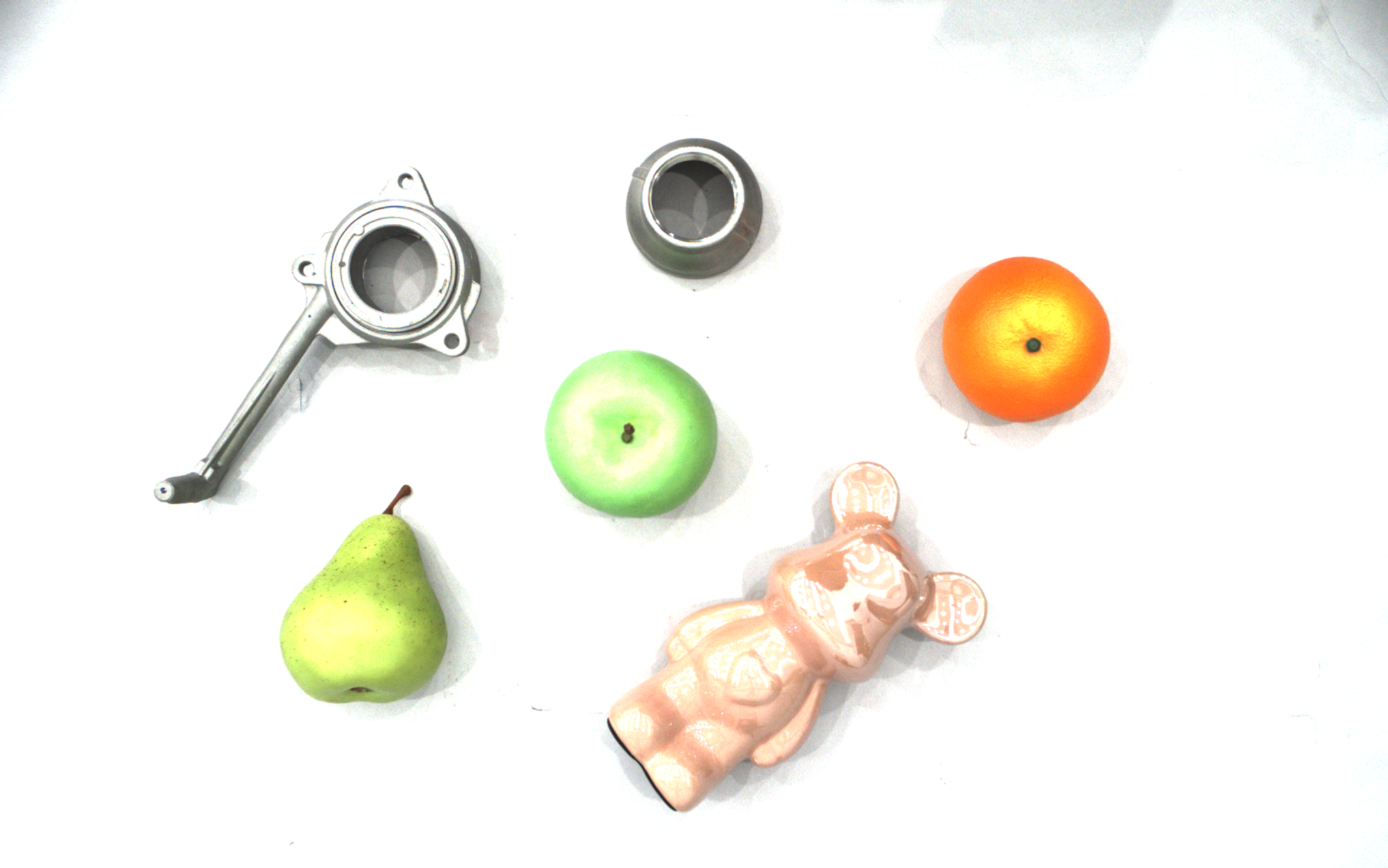
異なる露出時間に設定した(その他のパラメータは同じ)ときに取得した 2D 画像は以下のようです:
| 5ms | 90ms | 500ms |
|---|---|---|
|
|
|

1.1.2. Auto:諧調値
パラメータ説明 |
輝度に影響を与える。小さくすれば画像の輝度が低くなり、大きくすれば画像の輝度が高くなる |
|---|---|
可視性 |
初級、専門、グル |
オプション |
0~255 |
調整説明 |
なし |
異なる諧調値に設定した(その他のパラメータは同じ)ときに取得した 2D 画像は以下のようです:
| 50 | 100 | 150 |
|---|---|---|
|
|
|



| モノクロ画像の諧調値は画像の輝度のことで、カラー画像の諧調値は各カラーチャンネルの輝度のことです。 |
1.1.3. Auto:自動露出 ROI
パラメータ説明 |
|
|---|---|
可視性 |
初級、専門、グル |
オプション |
なし |
調整説明 |
自動露出 ROI 設定をご参照ください |
異なる自動露出 ROI に設定した(その他のパラメータは同じ)ときに取得した 2D 画像は以下のようです:
| 自動露出 ROI | 2D 画像 |
|---|---|
|
|
|
|
|
|




自動露出 ROI 設定
-
自動露出 ROI 設定の右の編集をクリックして ROI 設定ウィンドウを開きます。
-
ROI を選択して調整します。ROI をドラッグすることで移動できます。アンカーポイントをドラッグすることでを ROI 調整できします。
-
適用をクリックします。
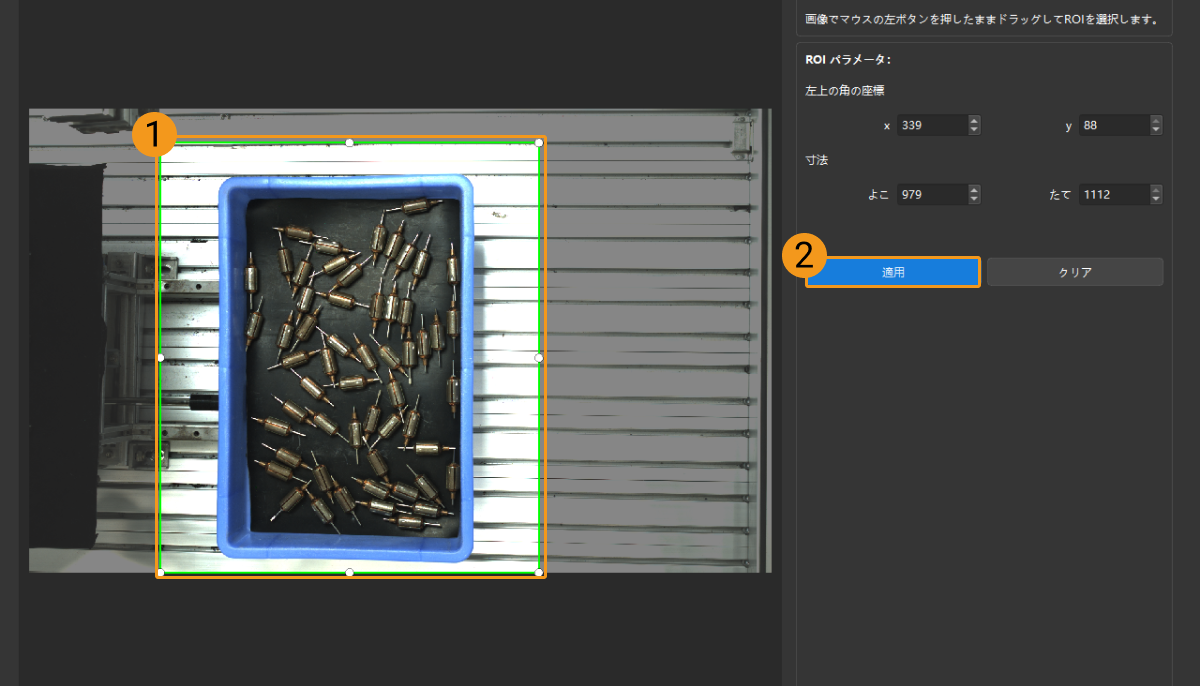
クリアをクリックすると設定をクリアできます。 -
画像を再度撮影し、2D 画像を表示して自動露出の効果を確認します。
1.1.4. HDR:トーンマッピング
パラメータ説明 |
画像を自然に見えるようにする。2D 画像と実際の対象物の間に大きな違いがある場合に使用する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
トーンマッピング:
|
トーンマッピングを True と False にした効果の比較は以下の通りです。
| オフ | オン |
|---|---|
|
|


1.1.5. HDR 露出時間シーケンス
パラメータ説明 |
複数の露出時間を設定し、異なる露出時間で撮影した画像を組み合わせて、暗い部分と明るい部分のディテールがより完全な 2D 画像を一枚取得する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
なし |
||
調整説明 |
|
一つの露出時間:
| 500ms | 700ms | 900ms |
|---|---|---|
|
|
|



複数の露出時間:
| 500ms & 900ms | 500ms & 700ms & 900ms |
|---|---|
|
|


1.1.6. Flash:Flash 収集モード
パラメータ説明 |
プロジェクターを使用する時の 2D 画像収集モードを選択する詳細な説明は2D Flash 露出モードをお読みください。 |
|---|---|
可視性 |
専門、グル |
オプション |
|
調整説明 |
現場での収集速度と連続キャプチャする時の 2D 画像の更新頻度の要求に応じて調整してください。 リアルタイムを選択した時、Flash 露出時間パラメータが調整可能です。 |
1.1.7. Flash:Flash 露出時間
パラメータ説明 |
Flash モードをリアルタイムに設定した時に 2D 画像収集時の露出時間を設定する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
設定範囲 |
0.1~99ms |
||
調整説明 |
暗い現場では露出時間を長く設定し、明るい現場では短く設定してください。
|

2. 3D パラメータ
このグループのパラメータは、深度データの計算に使用される画像に影響を与えるため、深度画像と点群の品質に影響します。
露出アシスタントを使用すれば推奨された露出パラメータが使用できます。3D パラメータの右の自動的設定をクリックして露出アシスタントウィンドウを開きます。
2.1. 露出回数
パラメータ説明 |
露出時間の数を設定する |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
設定範囲 |
1~3 |
||
調整説明 |
|
|
3D パラメータクラスのコーディングモードを反射に設定すると露出回数は設定できません。 |
2.2. 露出時間
パラメータ説明 |
深度データを取得する時の露出時間を設定します。設定する露出時間の数は露出回数の数によって決まる |
||
|---|---|---|---|
可視性 |
初級、専門、グル |
||
オプション |
|
||
調整説明 |
|
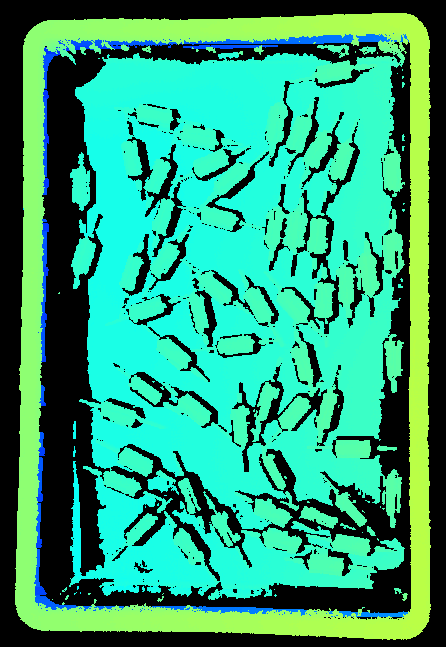
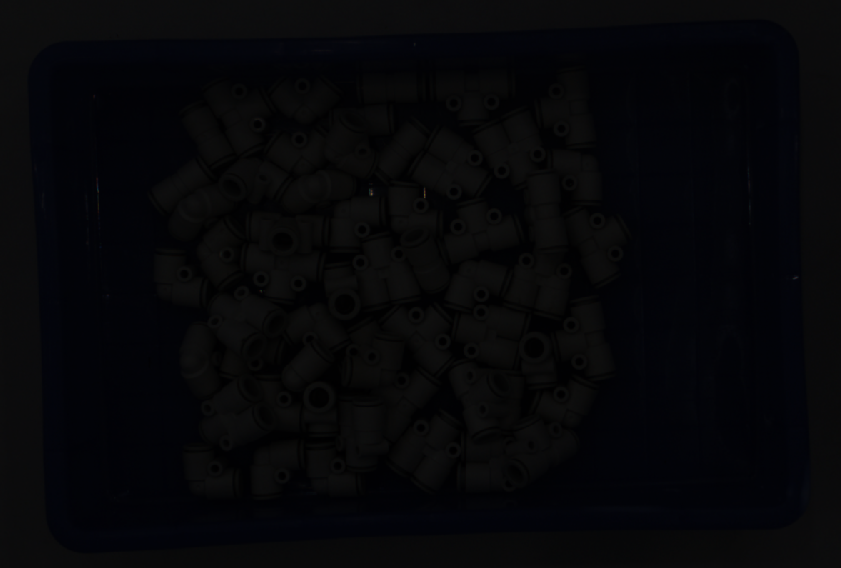
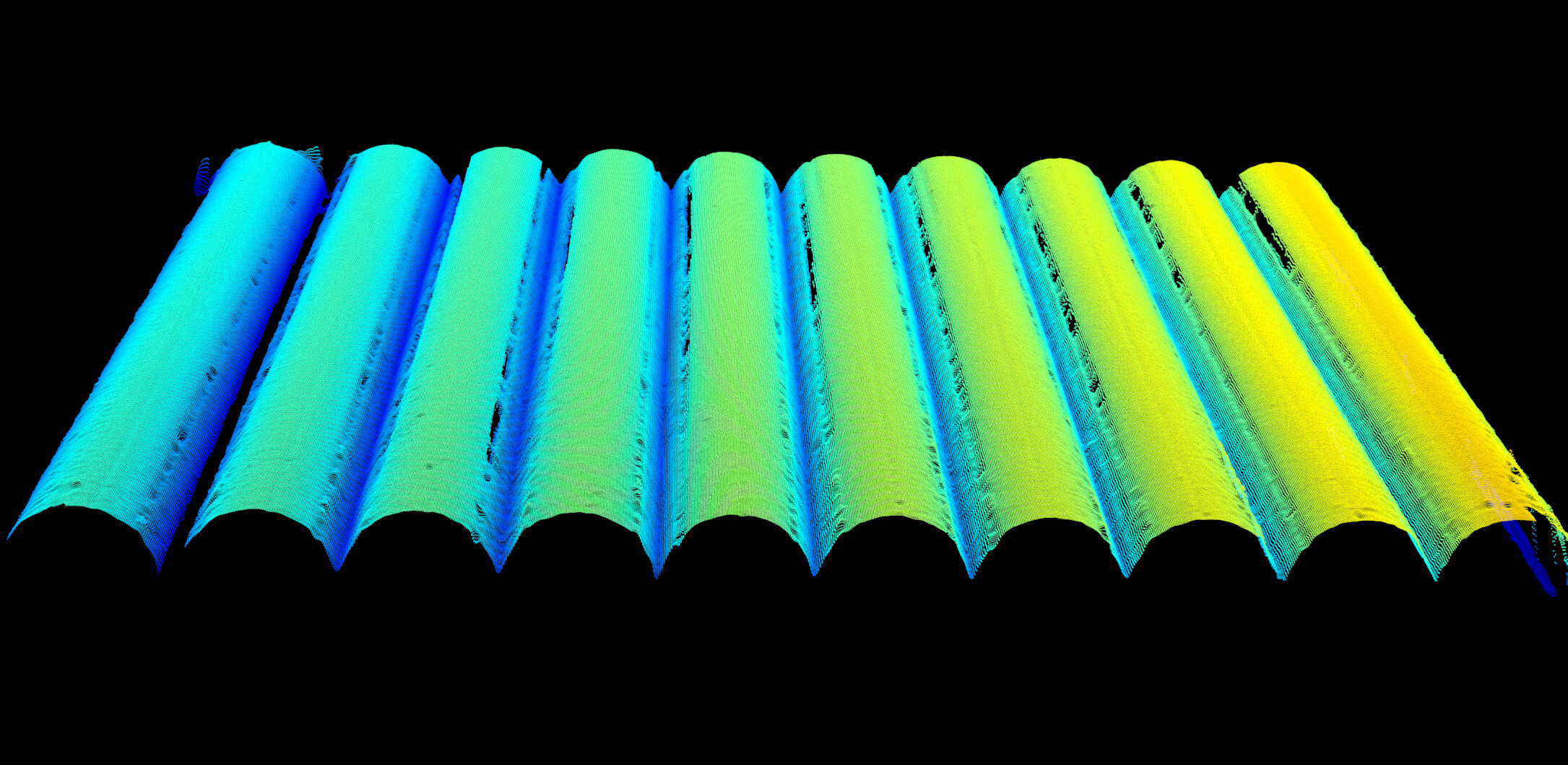
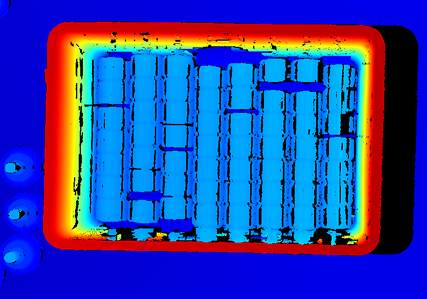
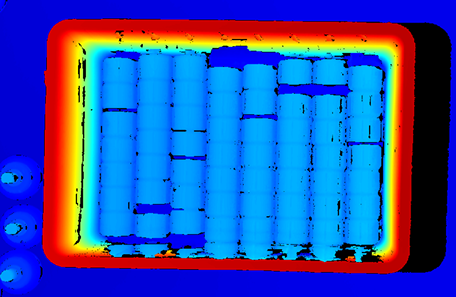
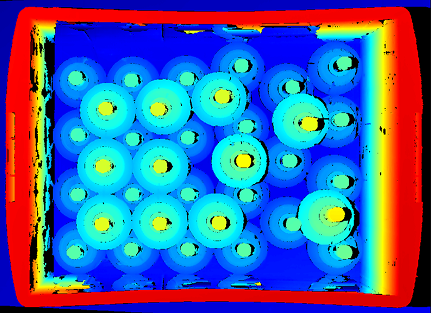
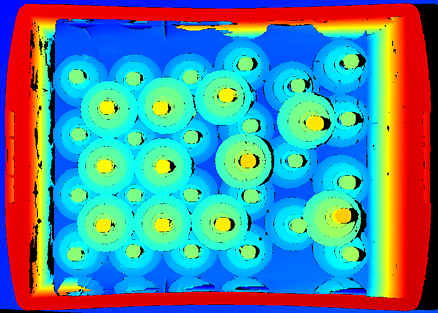
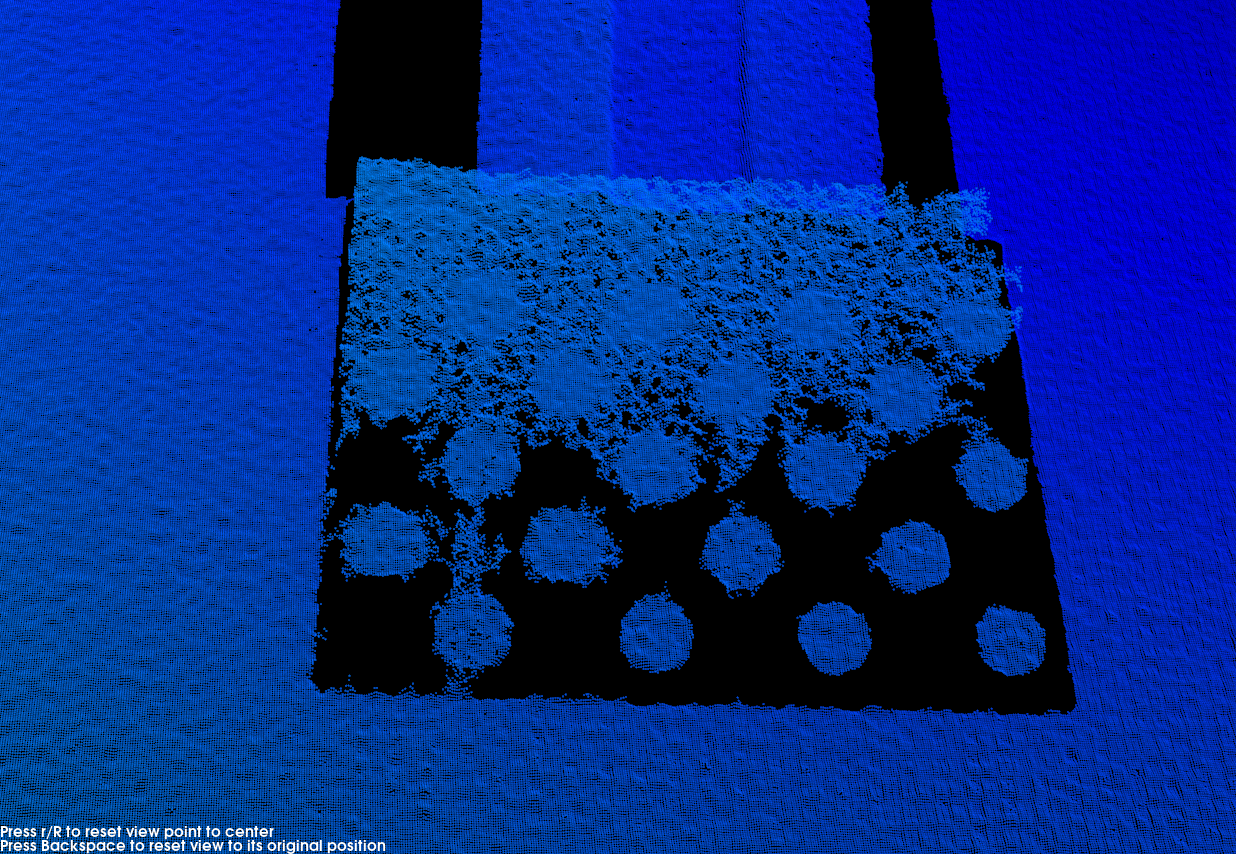
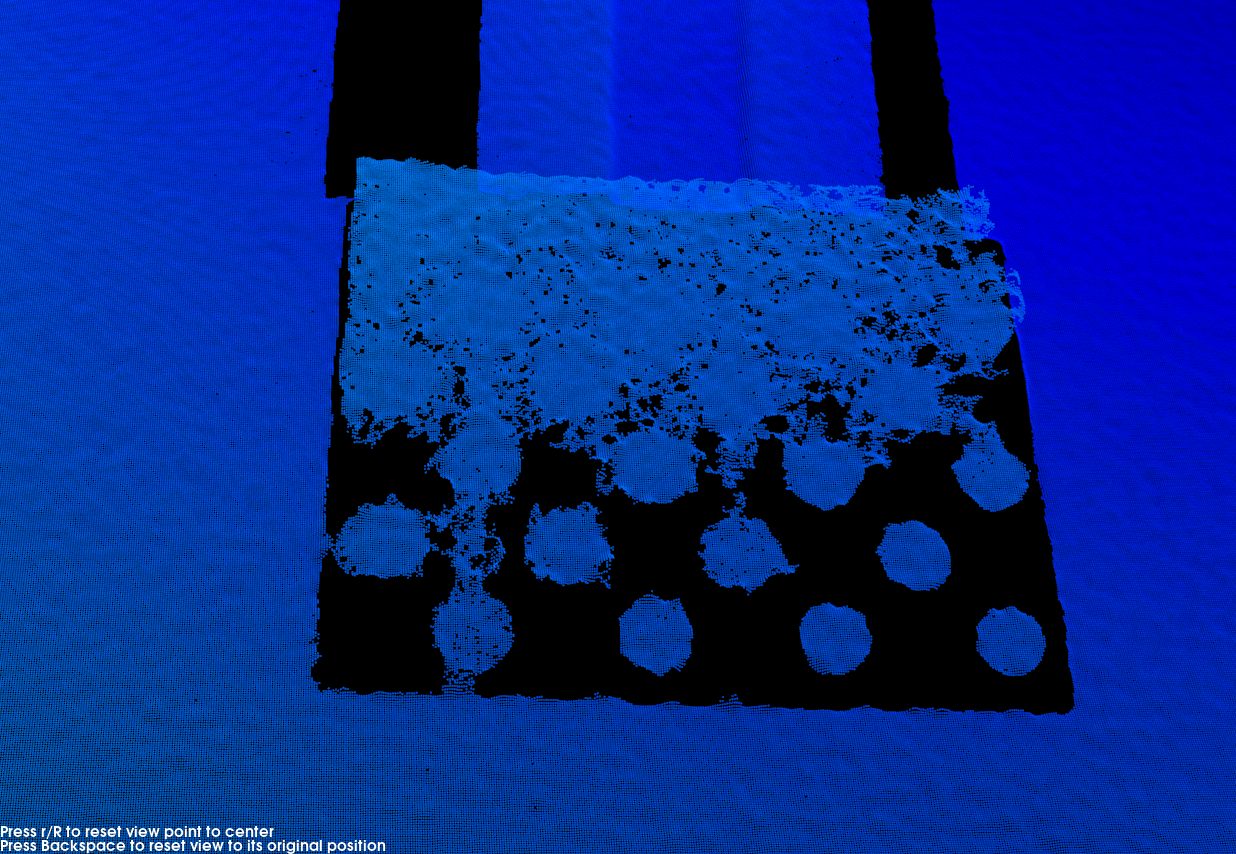
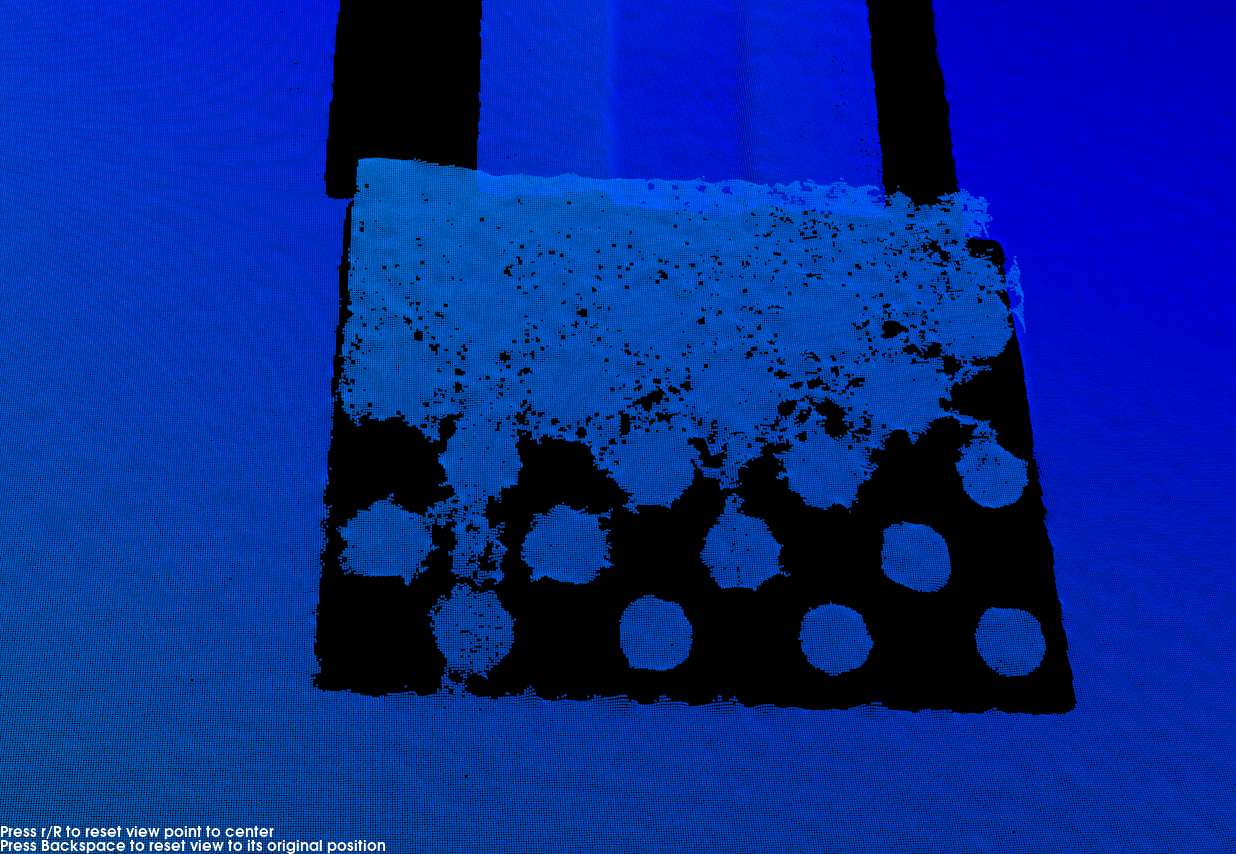
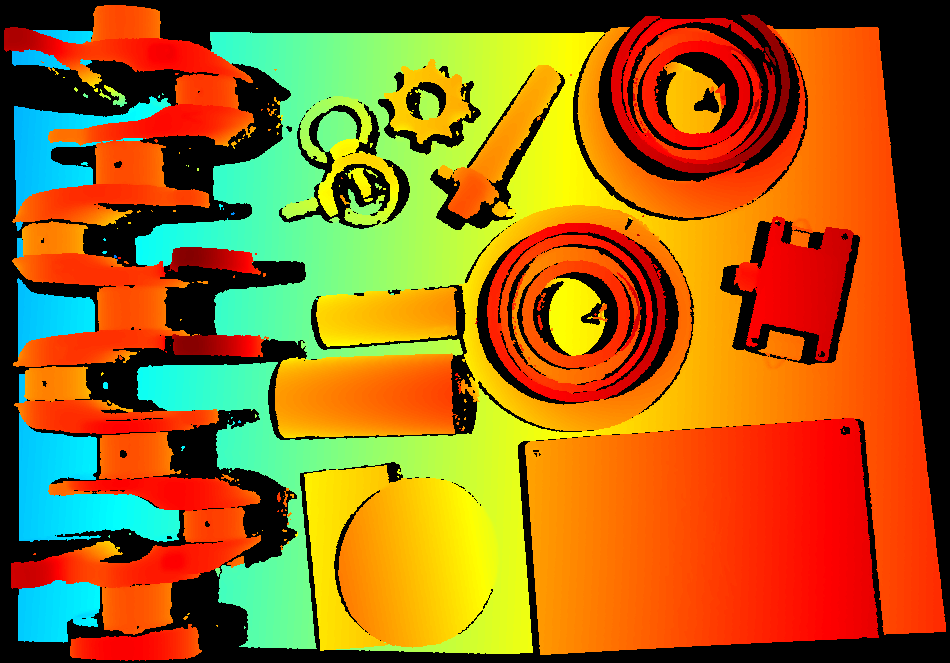
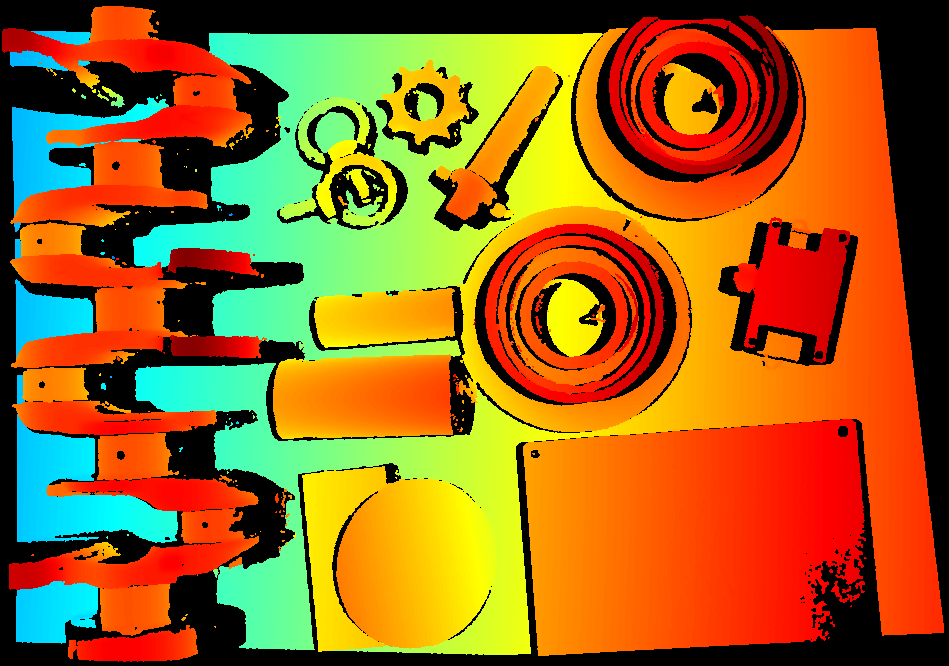
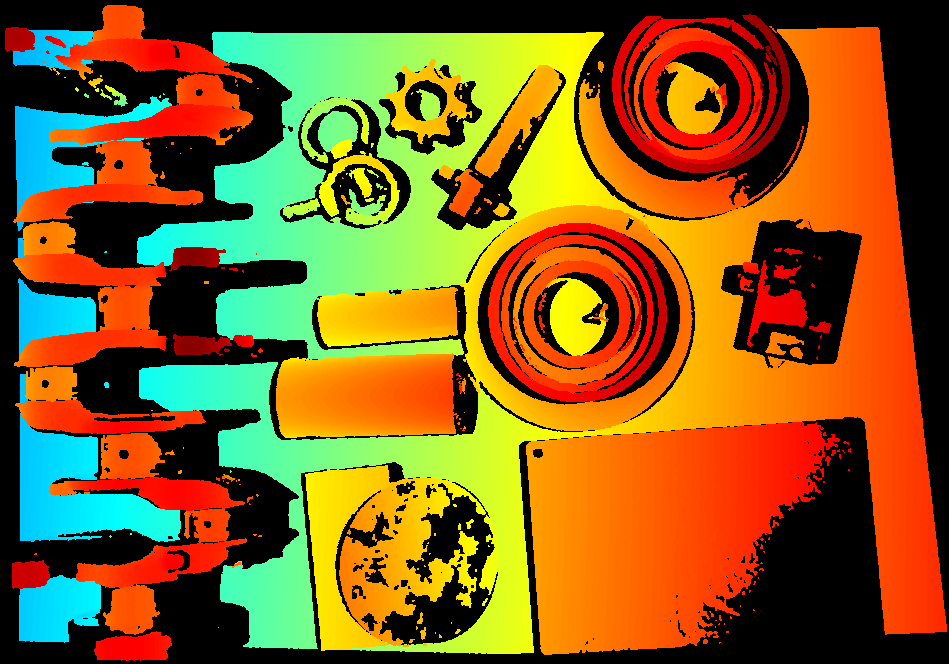
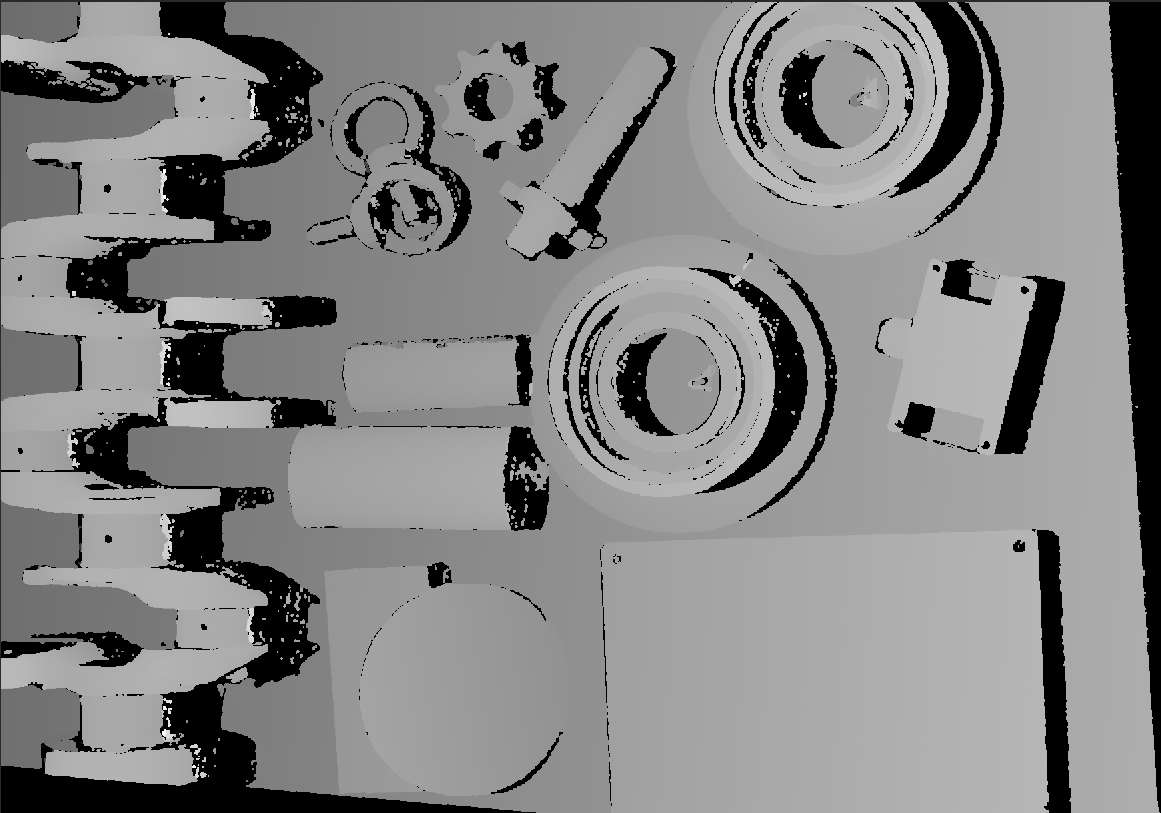
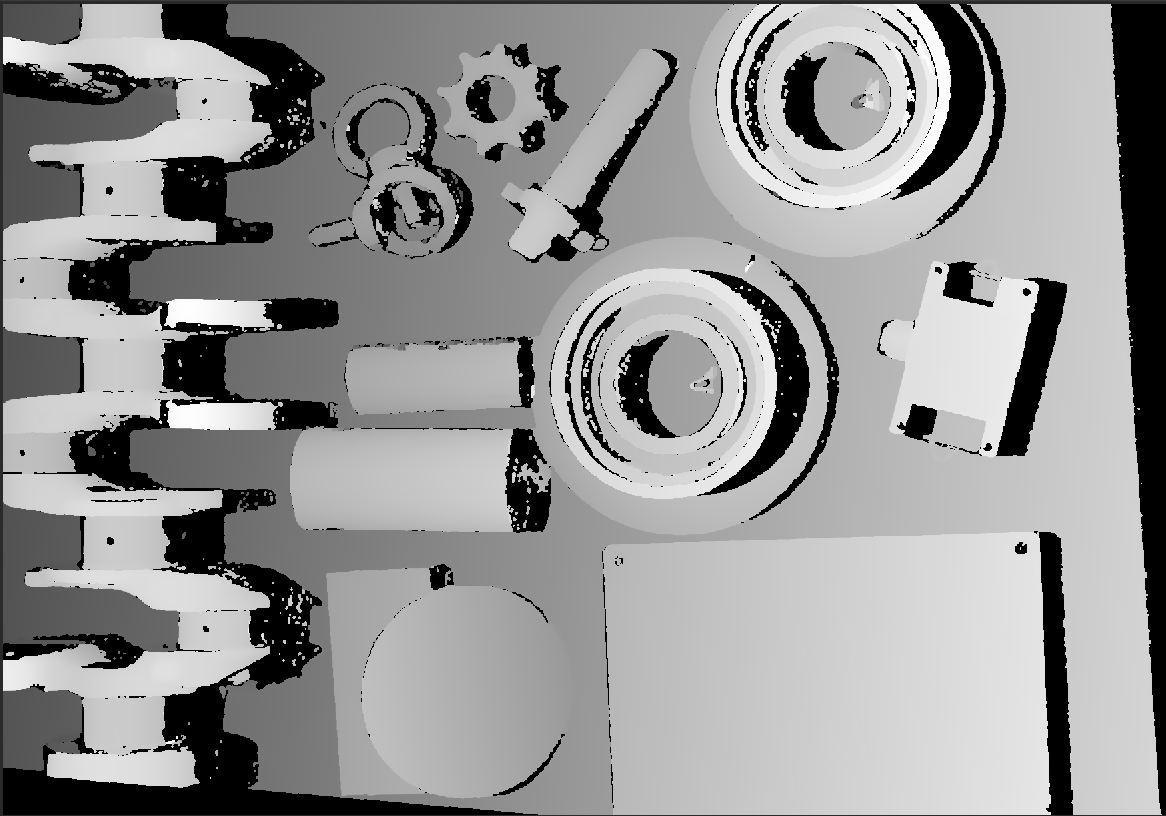
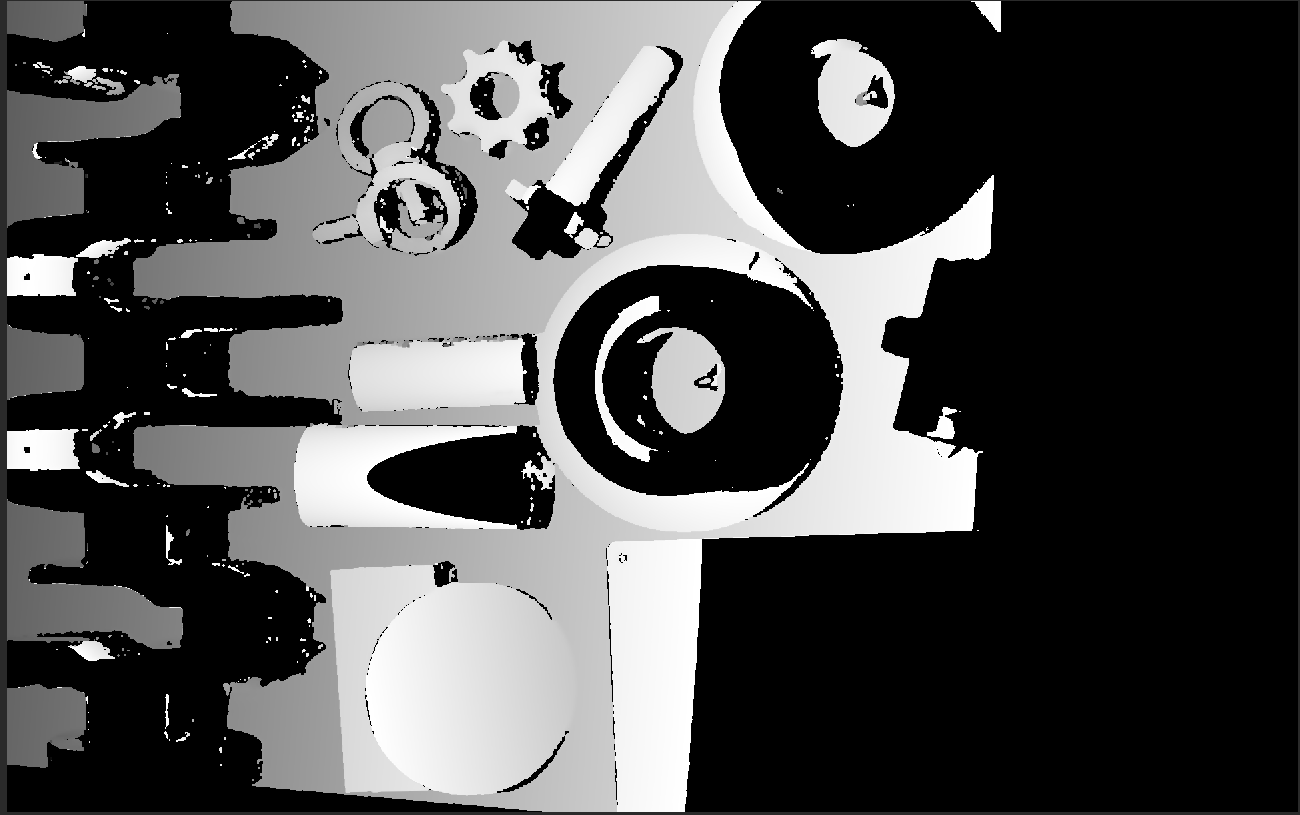
異なる露出時間で取得した画像は以下の通りです:
| 1ms | 4ms | 10ms | 50ms |
|---|---|---|---|
|
|
|
|
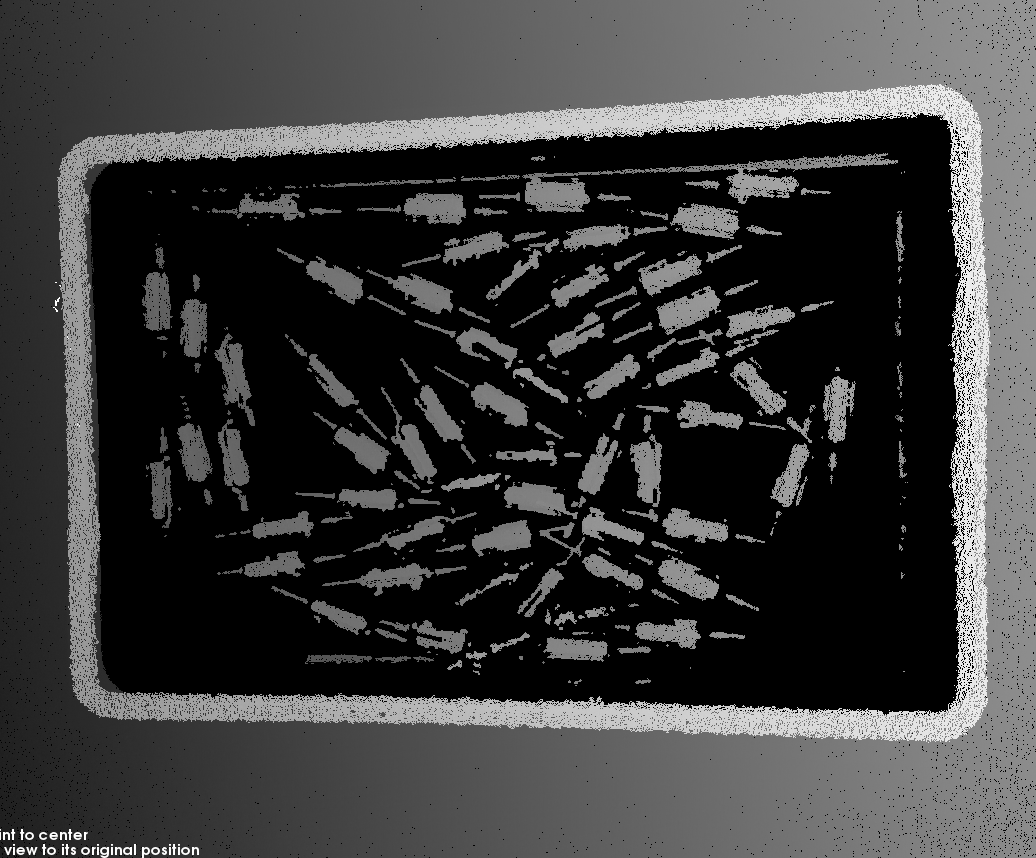
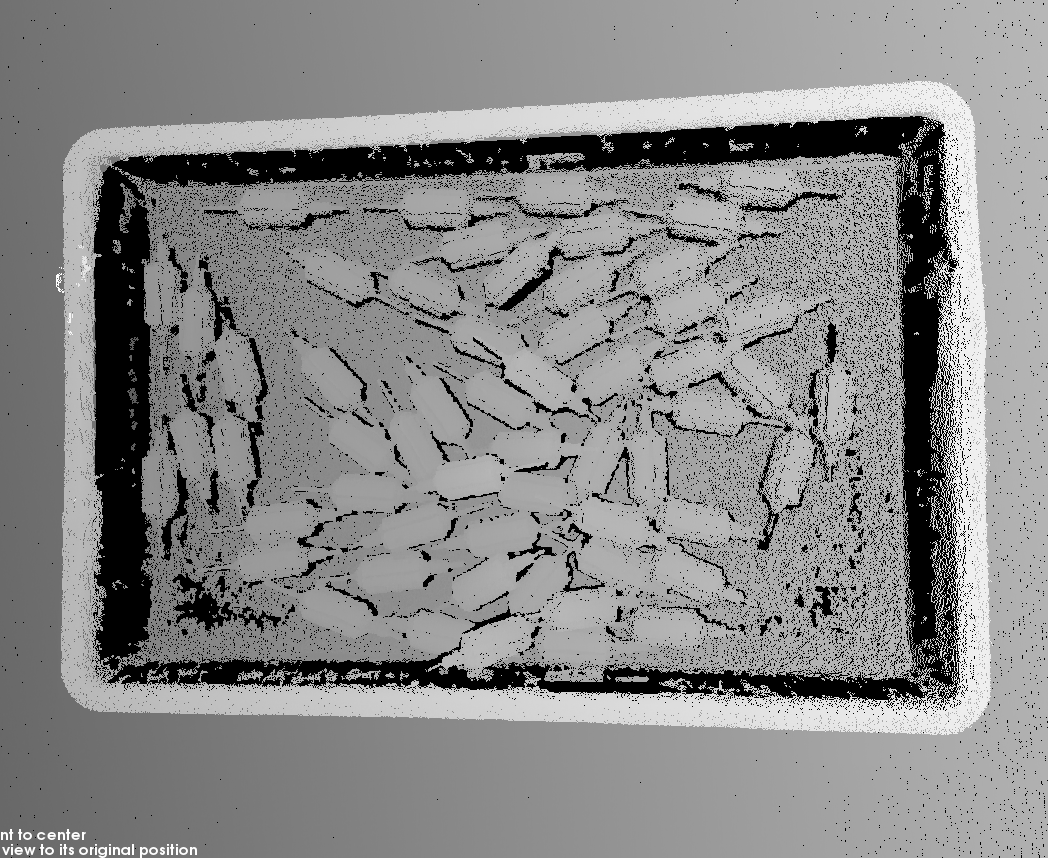
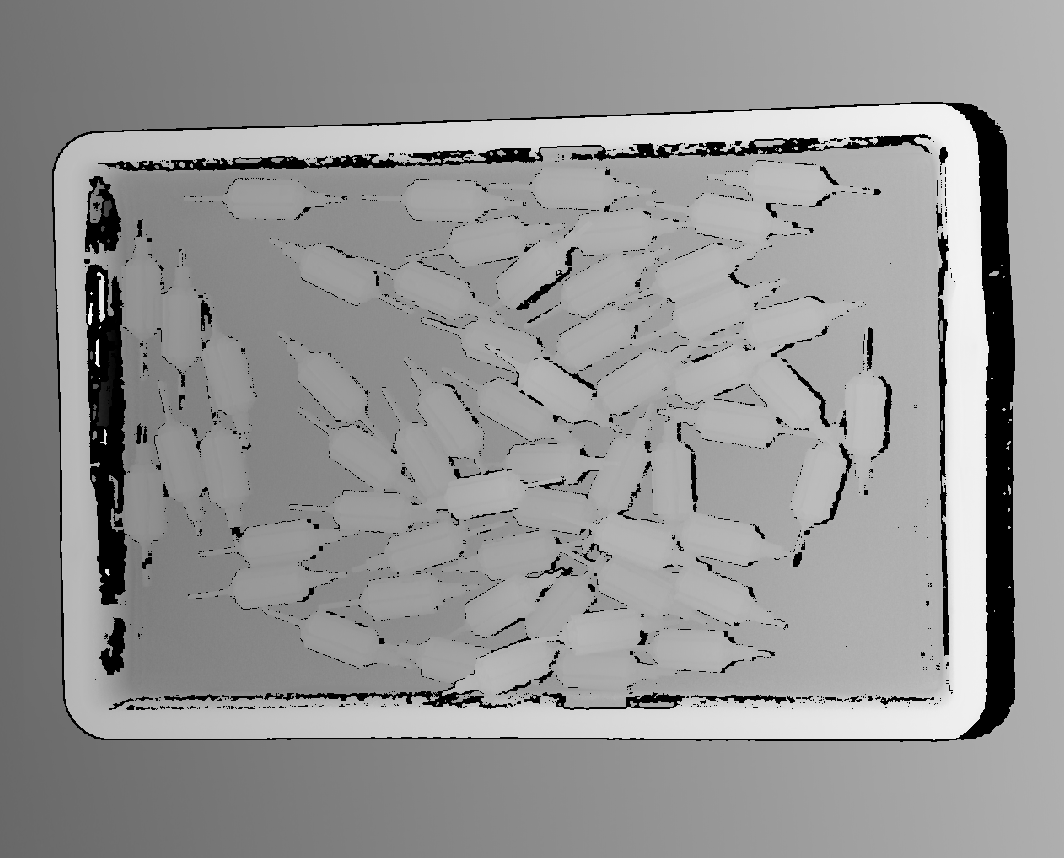
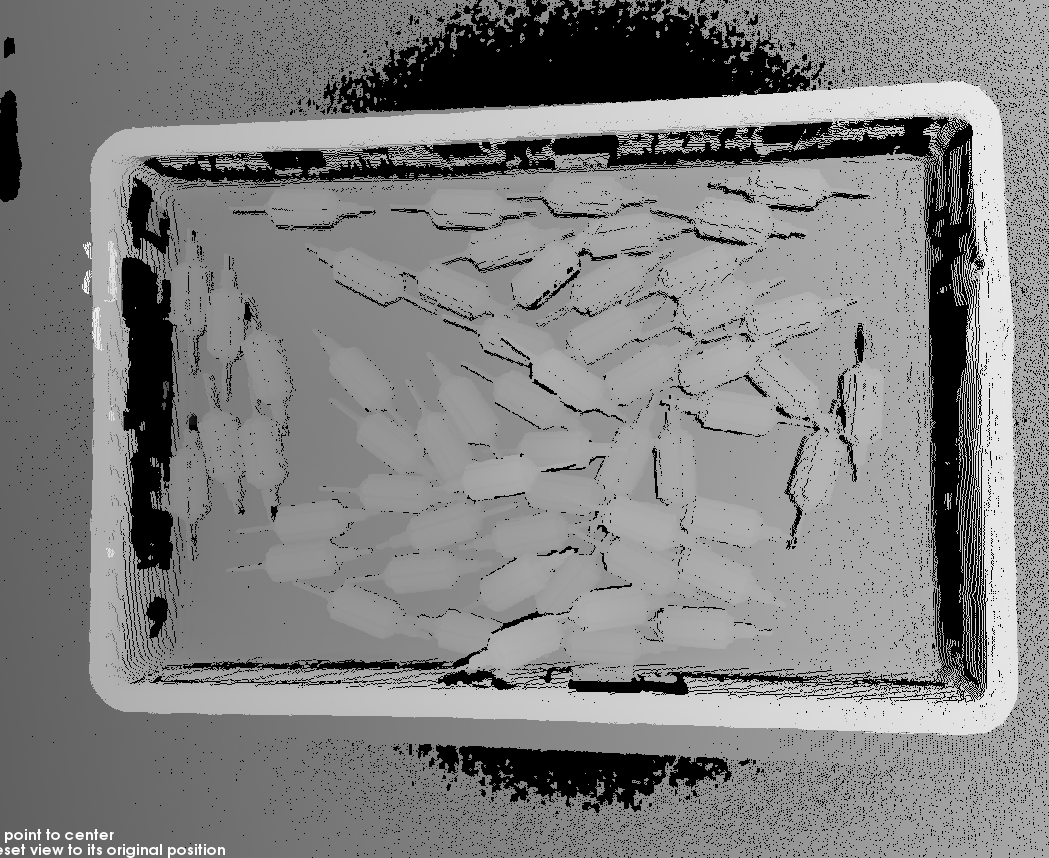
| 画像の黒い部分は点群のロスです。 |
2.3. カメラのゲイン
パラメータ説明 |
深度画像を明るくするために使用します。ただ、ノイズが発生する恐れがあります。
|
||
|---|---|---|---|
可視性 |
専門、グル |
||
オプション |
0~16dB |
||
調整説明 |
露出時間を調整しても輝度を改善できない場合に使用する
|
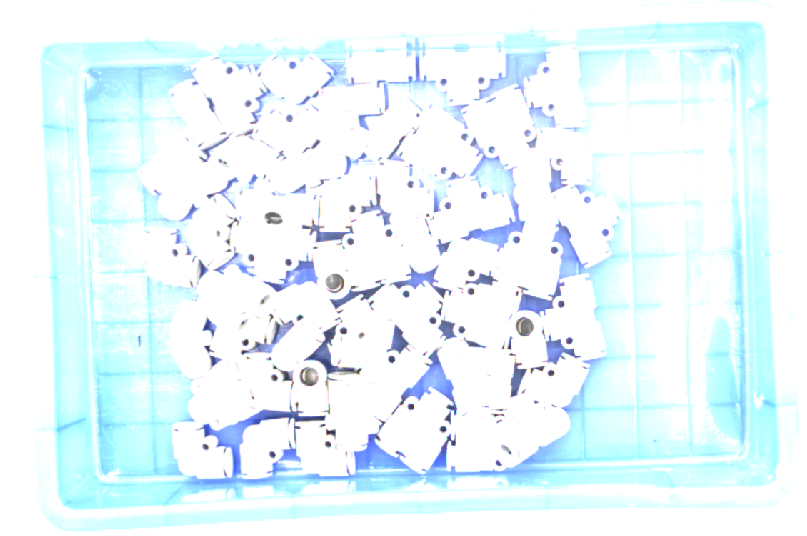
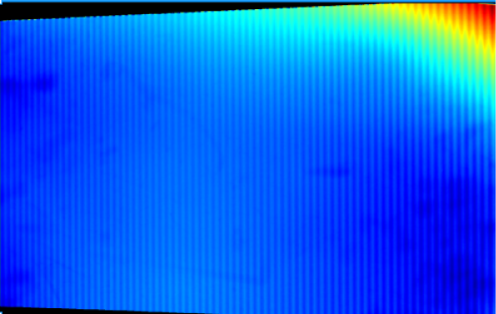
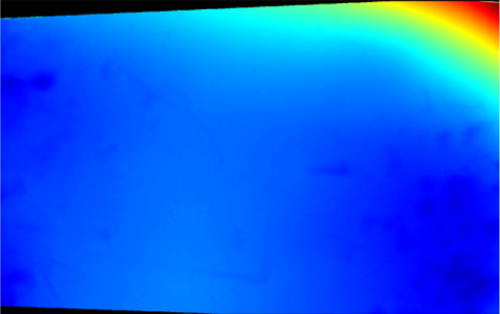
異なるカメラのゲインに設定した(その他のパラメータは同じ)ときに取得した画像は以下のようです:
| 0 | 5 | 10 | |
|---|---|---|---|
2D 画像(深度ソース) |
|
|
|
深度画像 |
|
|
|


2.4. 投影
2.4.1. 投影光の輝度
パラメータ説明 |
プロジェクターによる構造化光の輝度を調整する |
|---|---|
可視性 |
専門、グル |
オプション |
|
調整説明 |
対象物に応じて調整してください |
2.4.2. コーディングモード
パラメータ説明 |
投光する構造化光のパターンを選択する |
|---|---|
可視性 |
専門、グル |
オプション |
|
調整説明 |
実際のニーズに応じて調整してください |
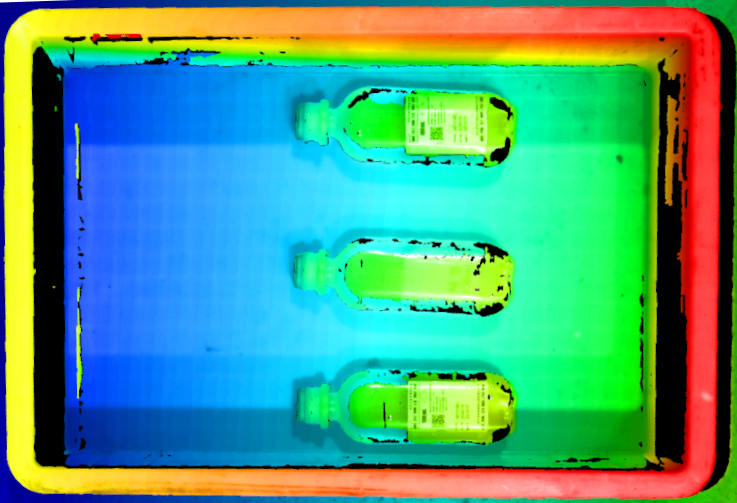
透明 を使用すると、透明物体の深度データ品質を改善できます。以下のような物体に適用できます。
-
生理食塩液バッグ
-
マットプラスチック試験管
-
商品のプラスチック包装(ビニール、ビン、ボルト、ケースなど)
ただし、透明 を選択すると以下のことにご注意ください。
-
完全透明物体(普通のプラスチック試験管など)のデータを大幅に改善できません。
-
物体の曲がりが激しい部分のデータを大幅に改善できません。
-
積み重ねられている透明物体のデータを大幅に改善できません。
-
背景が明るい、または背景が反射する場合にデータを大幅に改善できません。
-
環境の照明が強い、または激しく変化する場合にデータを大幅に改善できません。
-
2D モノクロカメラを使用するとき、青色の構造化光を投光するため、透明物体に青色の物体がある場合にデータを大幅に改善できません。
-
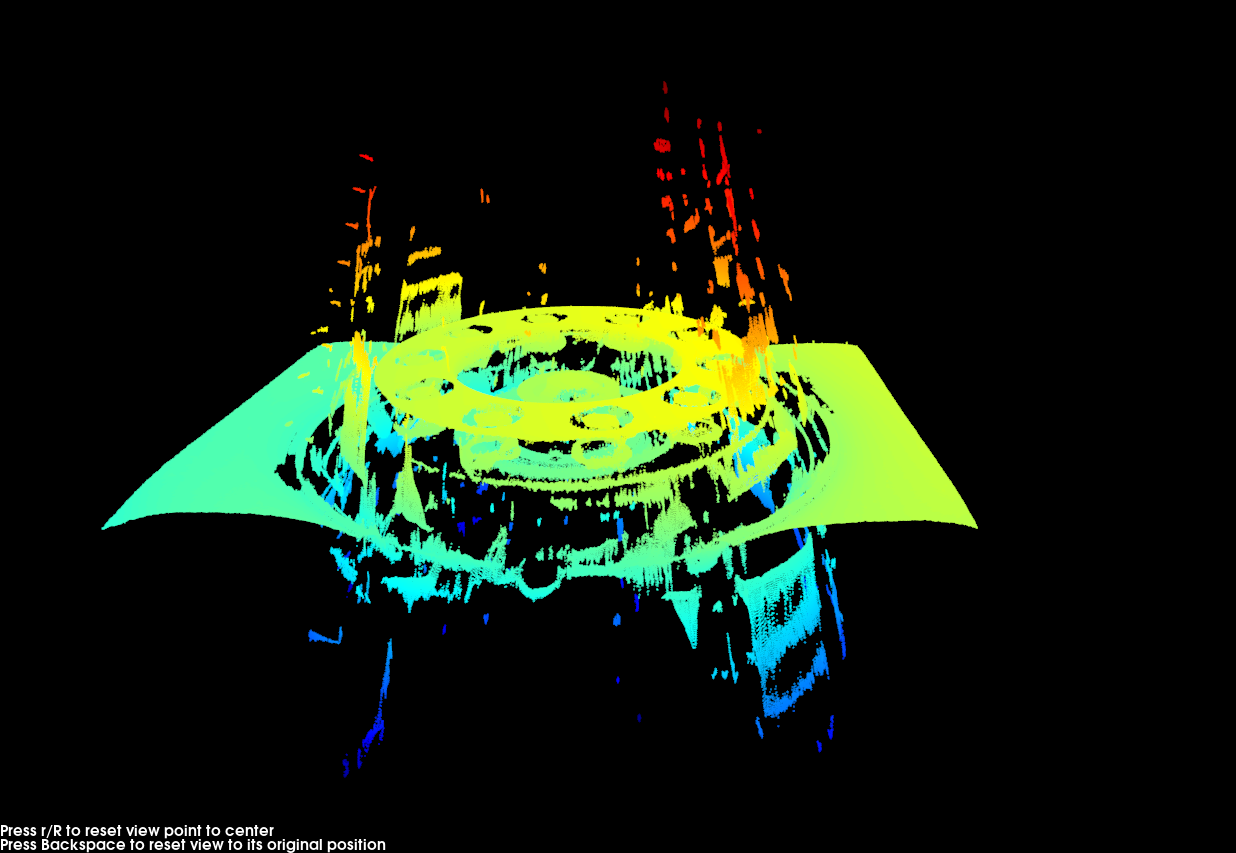
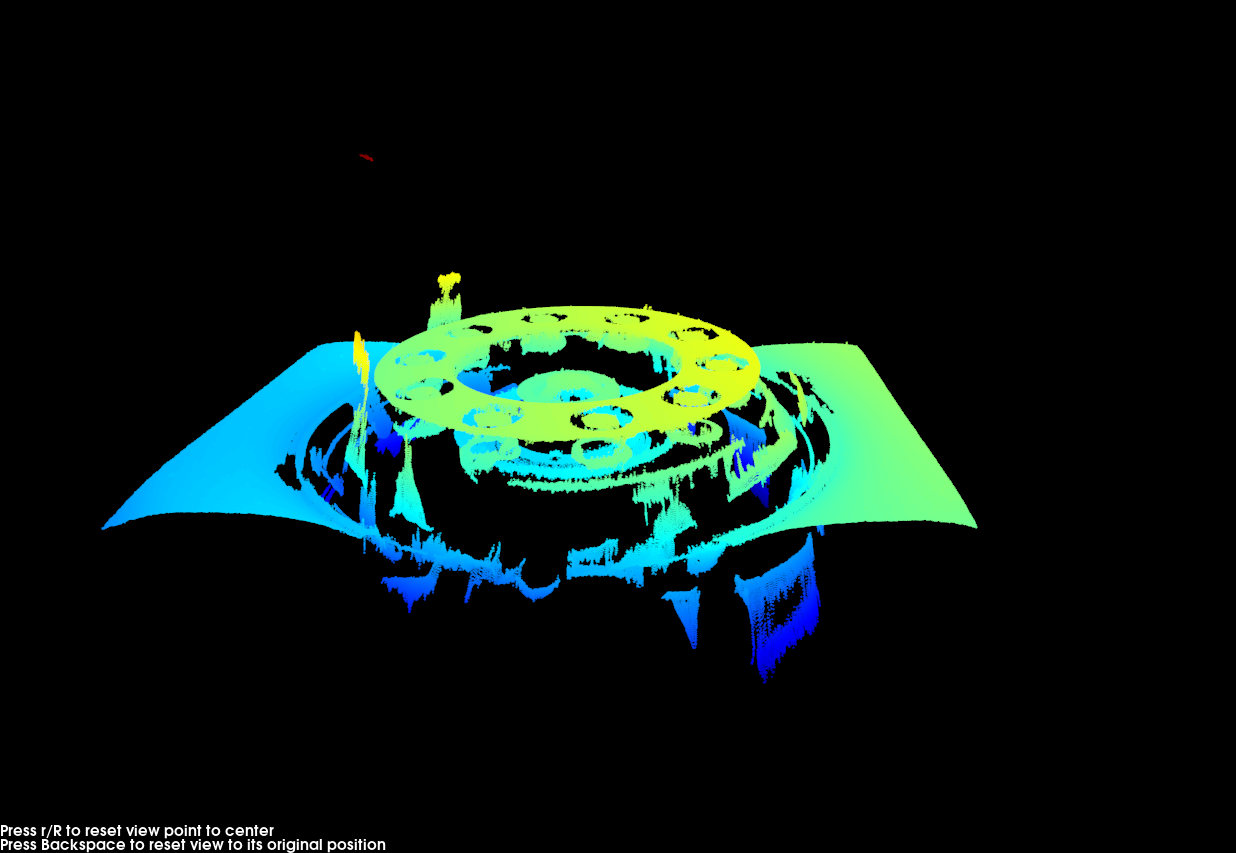
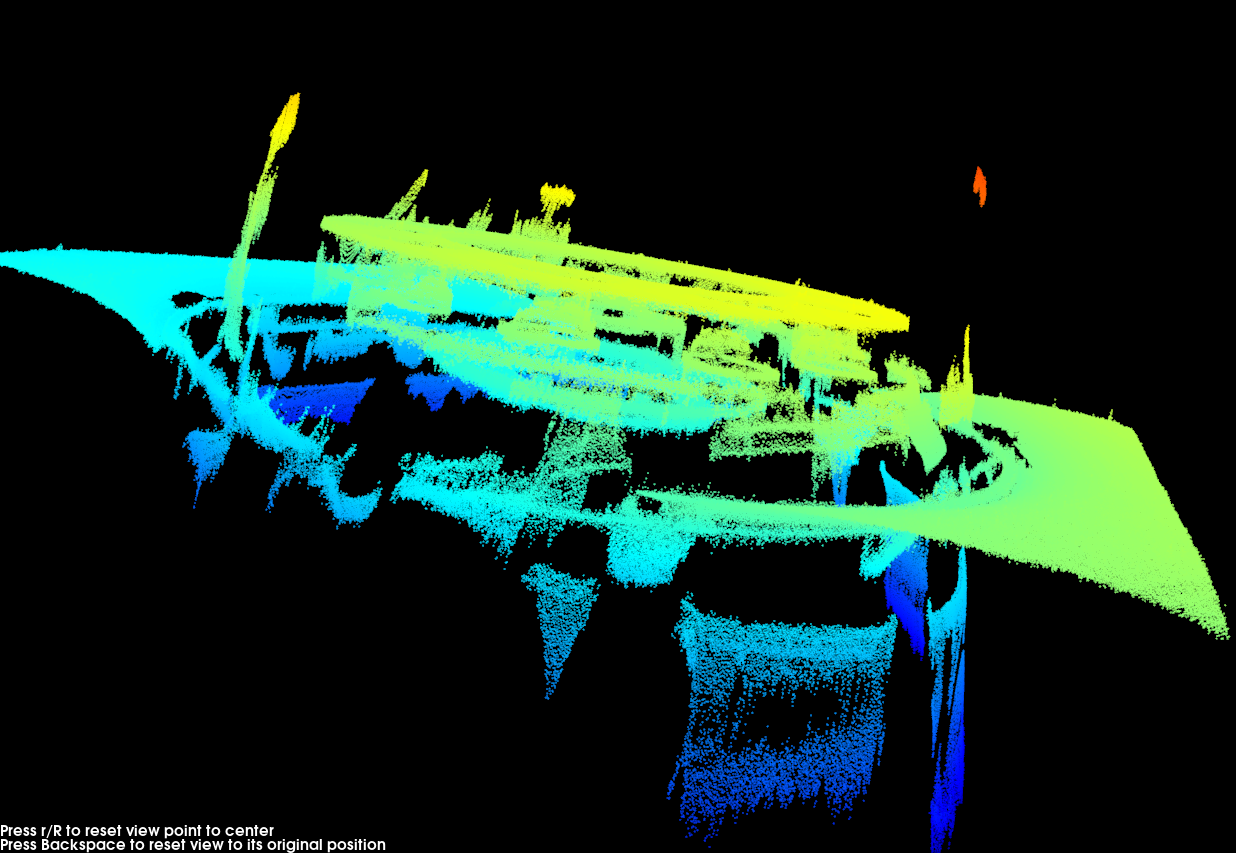
不透明、非反射性物体の場合、コーディングモードを精確と快速に設定した時に取得する点群は以下のようです。
精確 快速 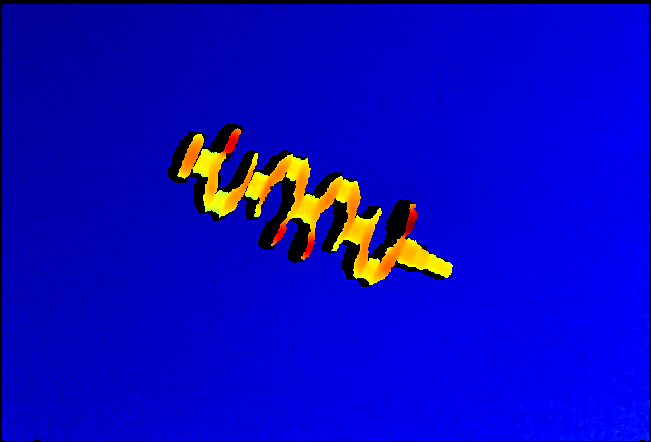

-
非透明物体の場合、コーディングモードを精確と透明に設定した時に取得する点群は以下のようです。
精確 透明物体 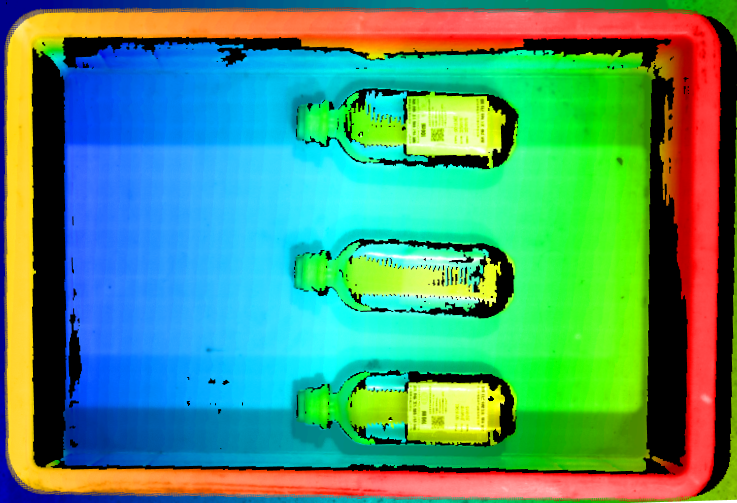
-
不透明、非反射性物体の場合、コーディングモードを精確と反射に設定した時に取得する点群は以下のようです。
精確 反射 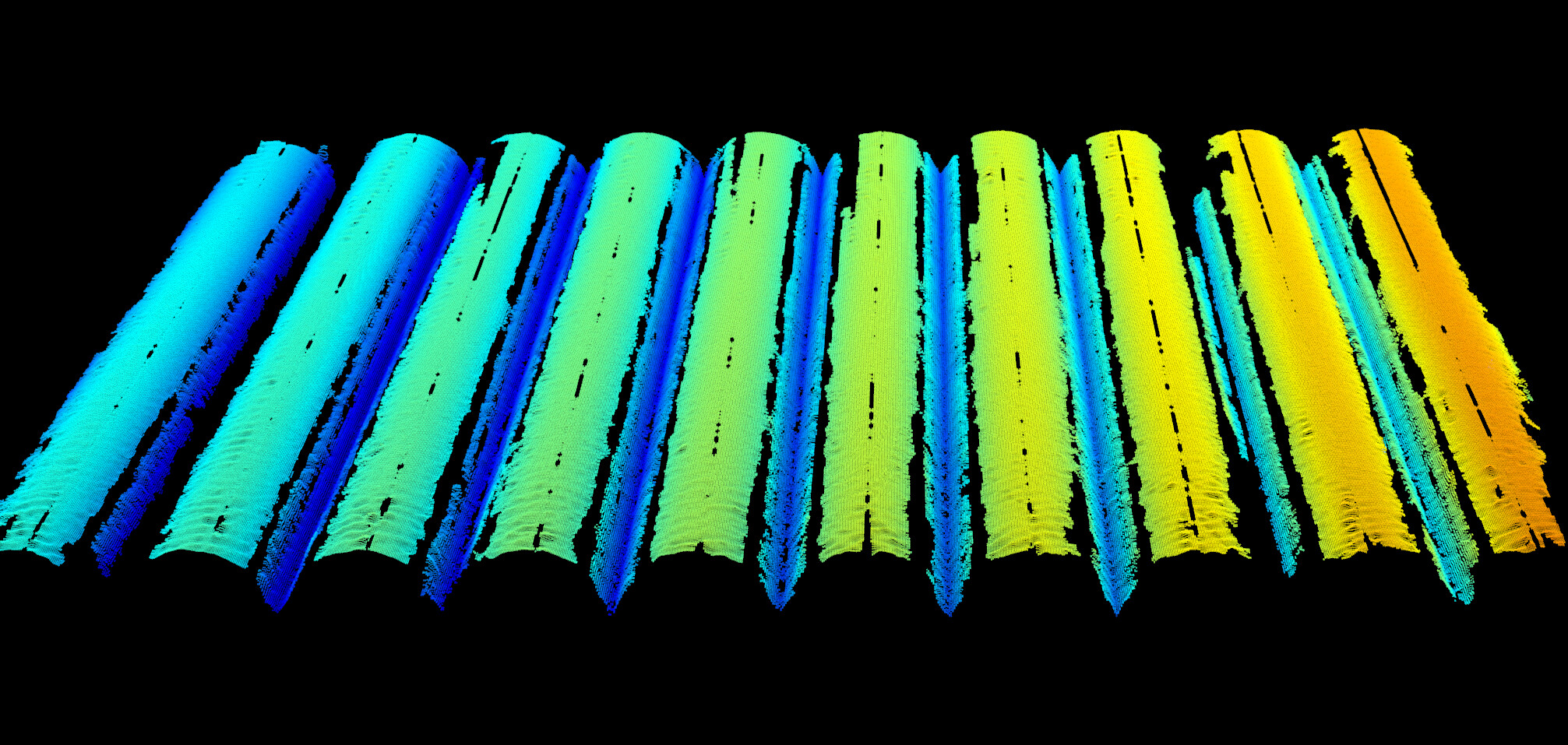
2.4.3. 反射:処理モード
パラメータ説明 |
反射コーディングモードを使用する時のデータ処理モードを選択する |
|---|---|
可視性 |
専門、グル |
設定範囲 |
|
調整説明 |
実際のニーズに応じて調整してください |
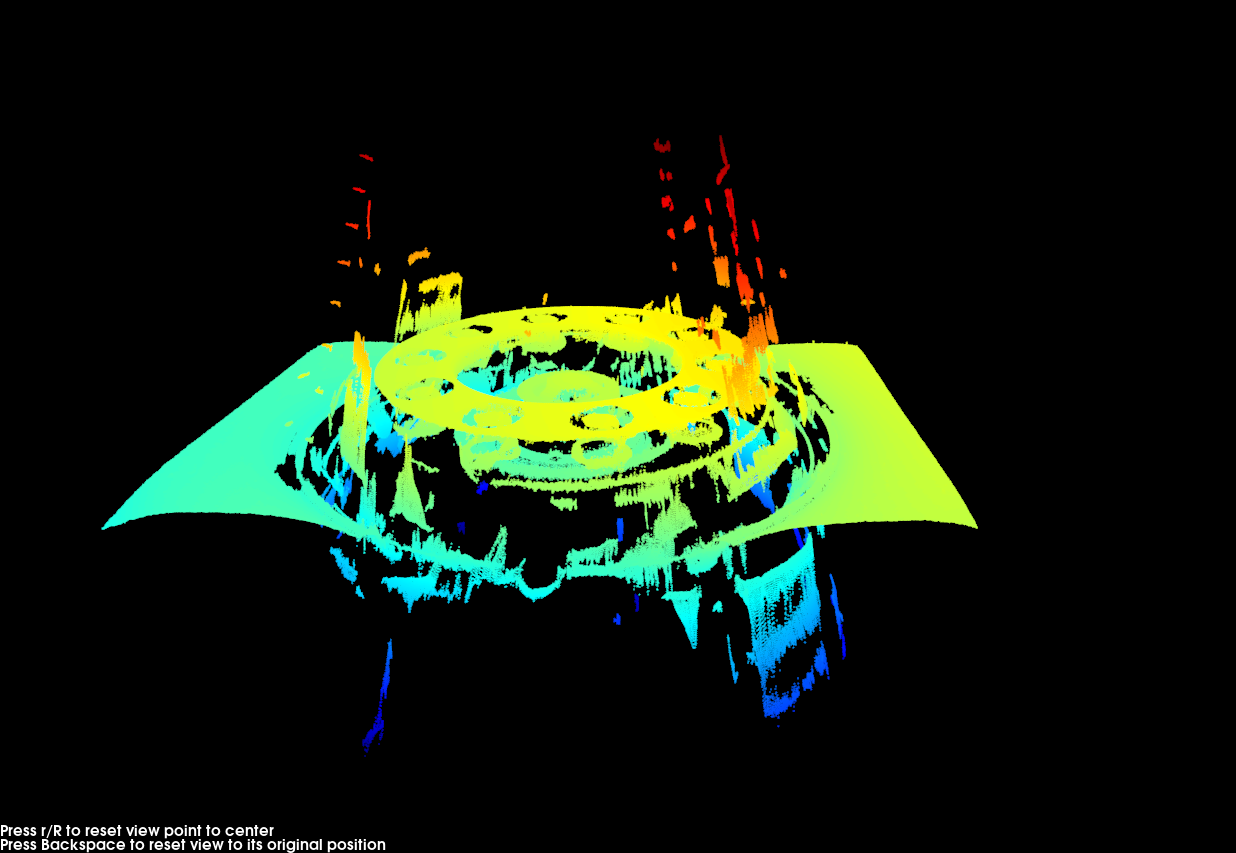
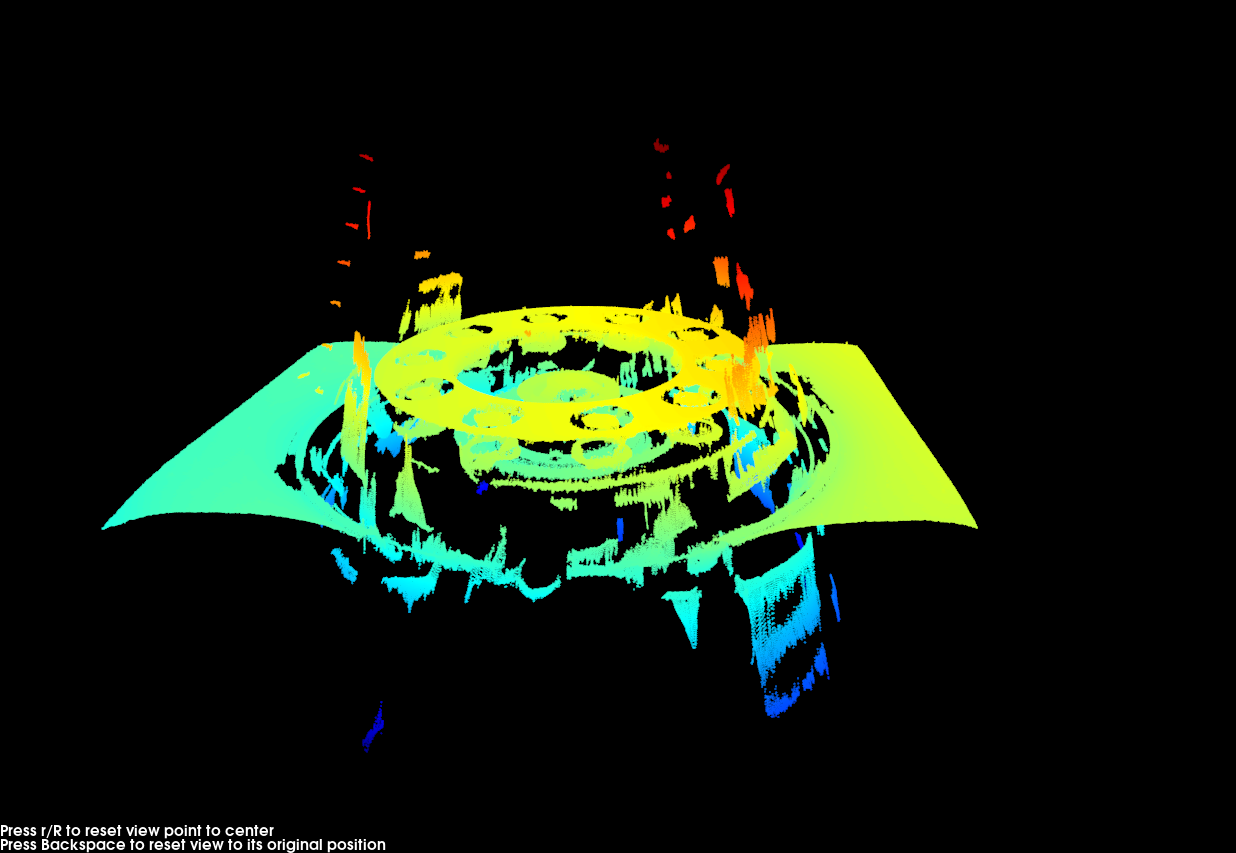
異なる処理モードに設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです。
| より速い | より完全 |
|---|---|
|
|
|
|
2.4.4. ちらつき防止モード
パラメータ説明 |
ちらつきとは、環境光の急速で周期的な明暗の変化を指す。ちらつきは、深度データの変動を引き起こす。構造化光の投光頻度を調整することで改善可能 |
|---|---|
可視性 |
専門、グル |
オプション |
|
調整説明 |
所在地の周波数に合わせてお選びください。ほとんどの国では、50Hz が採用されており、アメリカと一部のアジアの国・地域では 60Hz が使用されている |
|
3D パラメータクラスのコーディングモードを透明または反射に設定するとちらつき防止モード機能は使用できません。 |
ちらつき防止モードを不使用/使用したときに取得した深度画像の比較:
| 不使用 | 使用 |
|---|---|
|
|
3. 点群後処理
点群後処理パラメータを調整することで点群の品質を改善できます。
3.1. 表面平滑化
パラメータ説明 |
点群の深度変化を減らし、点群を実物の表面に近づけることが可能。ただし、一部の物体表面ディテールのロスが発生する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
|
調整説明 |
|
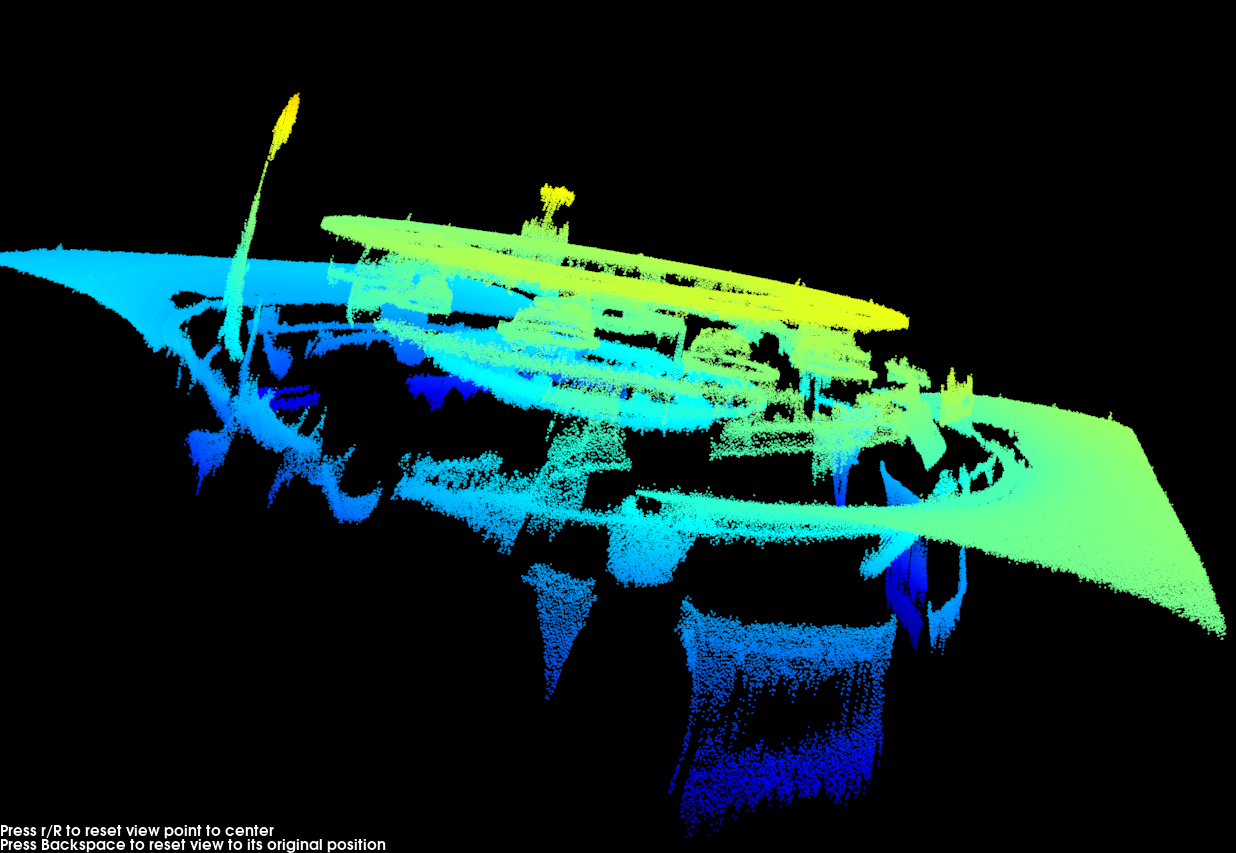
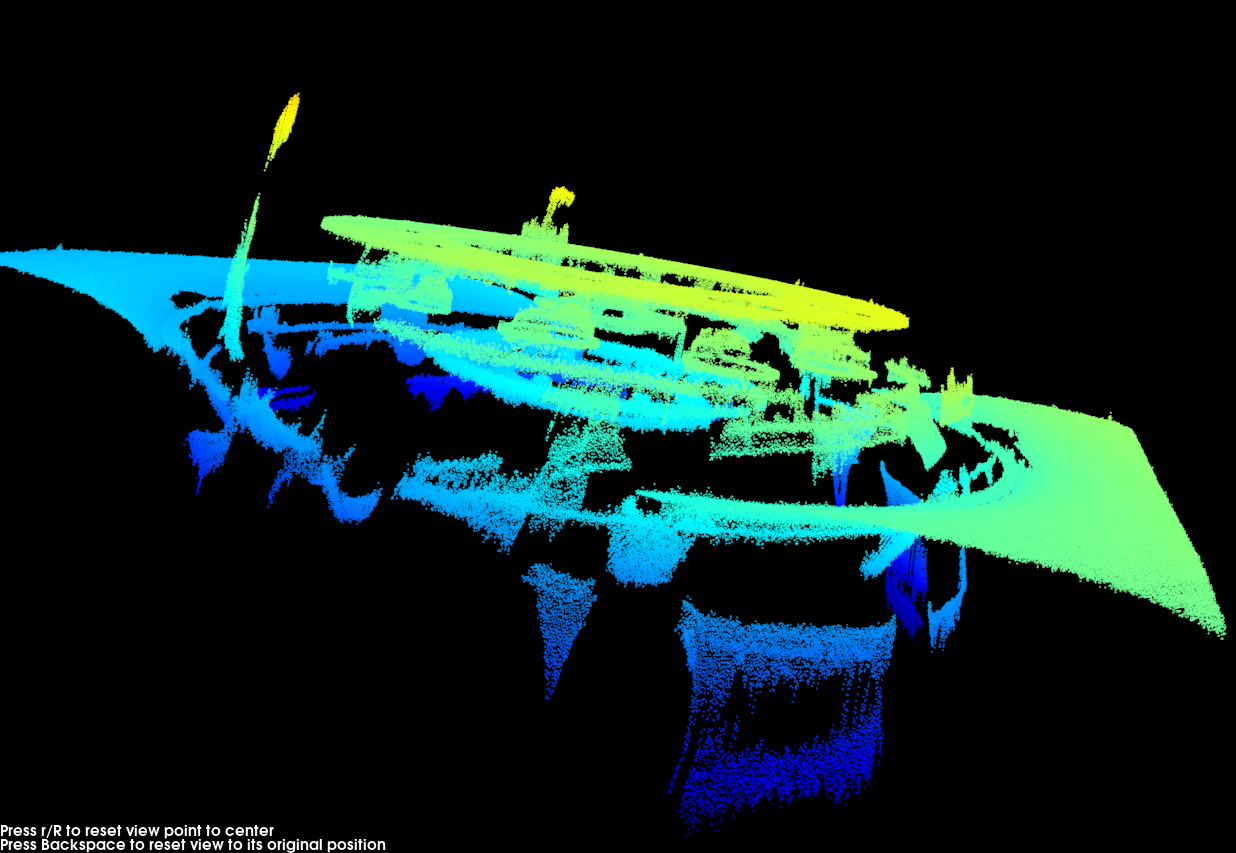
異なる表面平滑化に設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです:
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
3.2. 外れ値除去
パラメータ説明 |
点群のノイズを除去する。外れ値とは、対象物の点群から離れた点の集まりのこと |
|---|---|
可視性 |
初級、専門、グル |
オプション |
|
調整説明 |
|
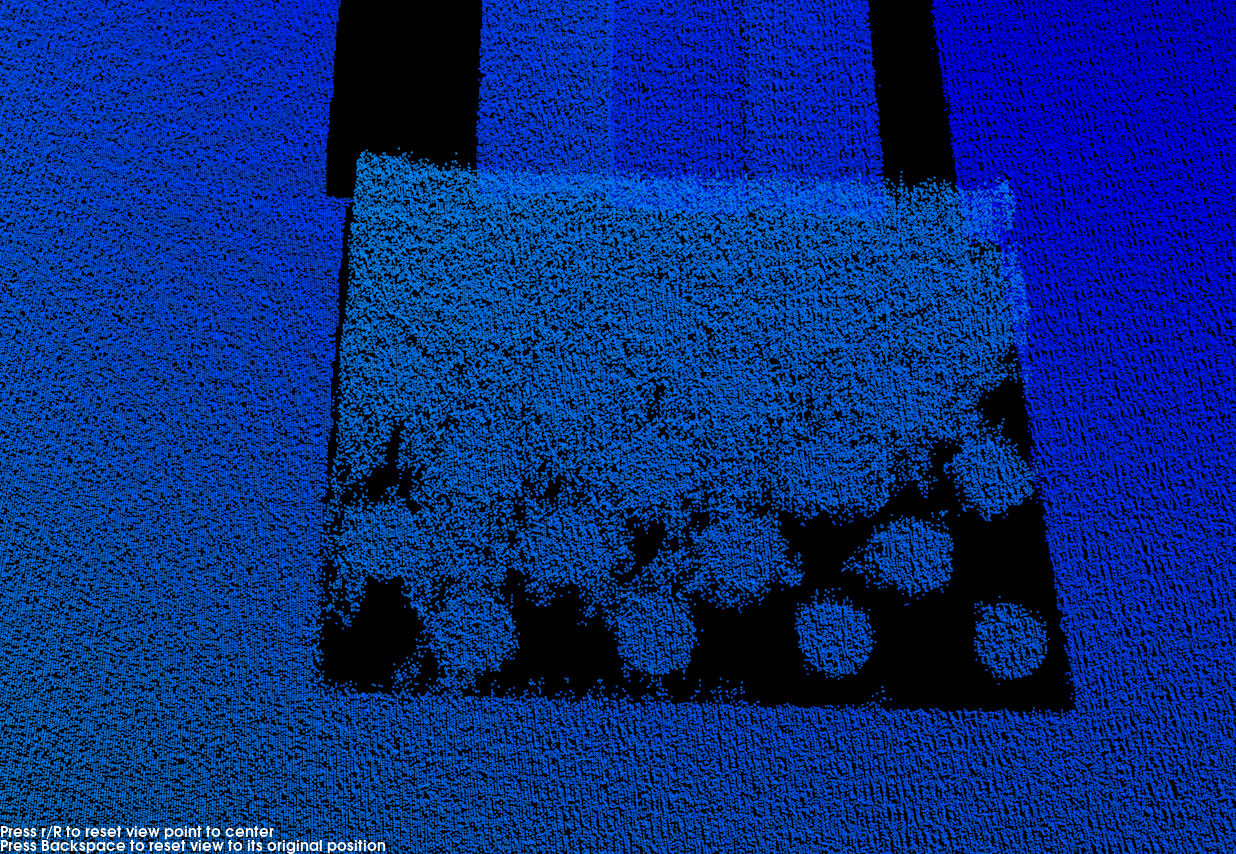
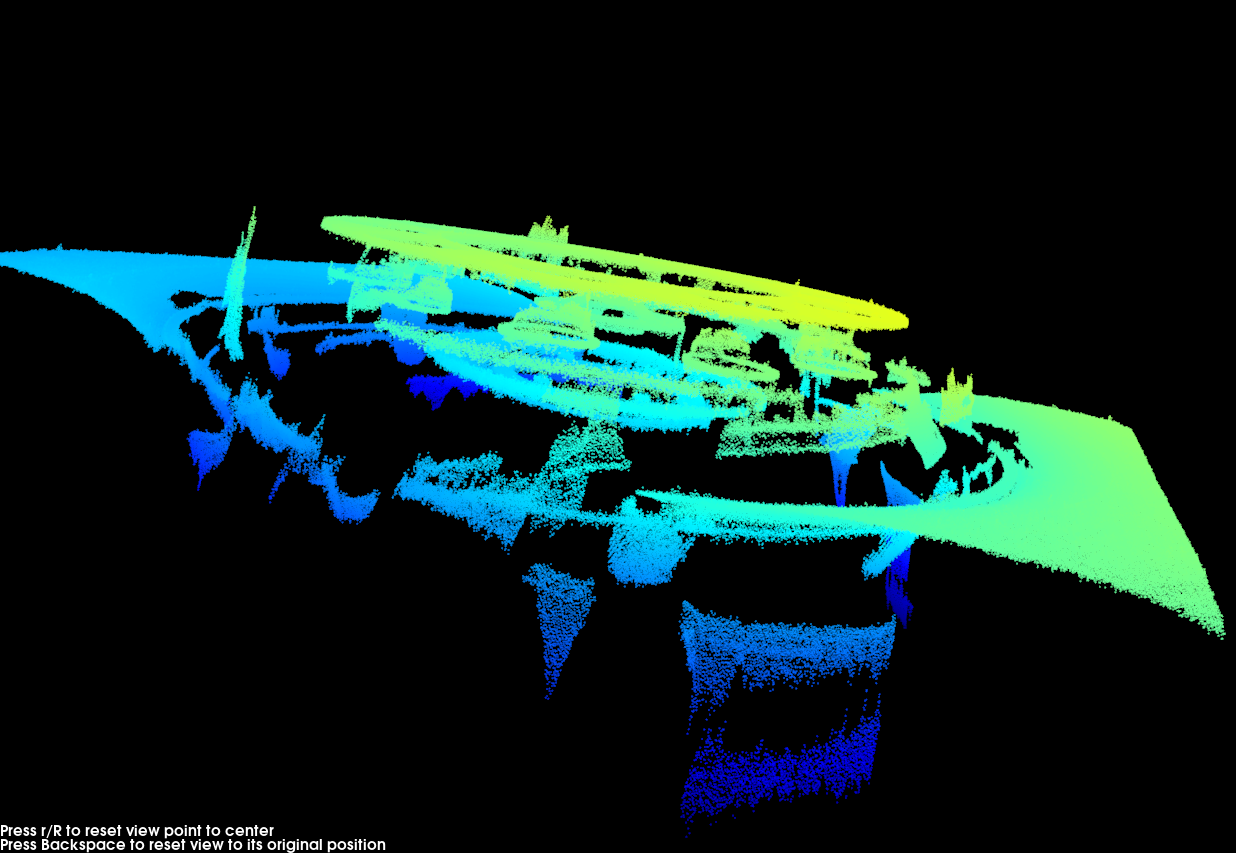
異なる外れ値除去に設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです:
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
3.3. ノイズ除去
パラメータ説明 |
対象物の表面付近のノイズを除去するノイズとは、表面付近の外れ値のこと |
|---|---|
可視性 |
専門、グル |
オプション |
|
調整説明 |
|
異なるノイズ除去に設定した(その他のパラメータは同じ)ときに取得した点群は以下のようです:
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
| この機能を使用して必要な点群が除去された場合、ノイズ除去の強度を低くしてください。ただし、こうすればより多くのノイズが残ります。 |
3.4. 歪み補正
パラメータ説明 |
対象物の色や高さの激しい変動による深度データの歪みを補正します。 歪み補正を使用をチェックしてから現在の値を調整します。 |
|---|---|
可視性 |
専門、グル |
調整範囲 |
1~10 |
調整説明 |
取得したデータの状態によって現在の値を調整します。その後効果を確認してください。 |
|
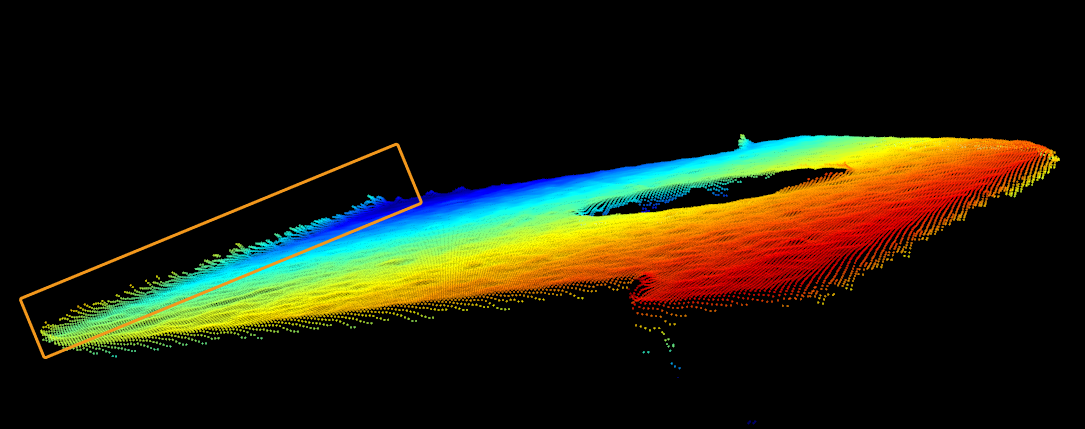
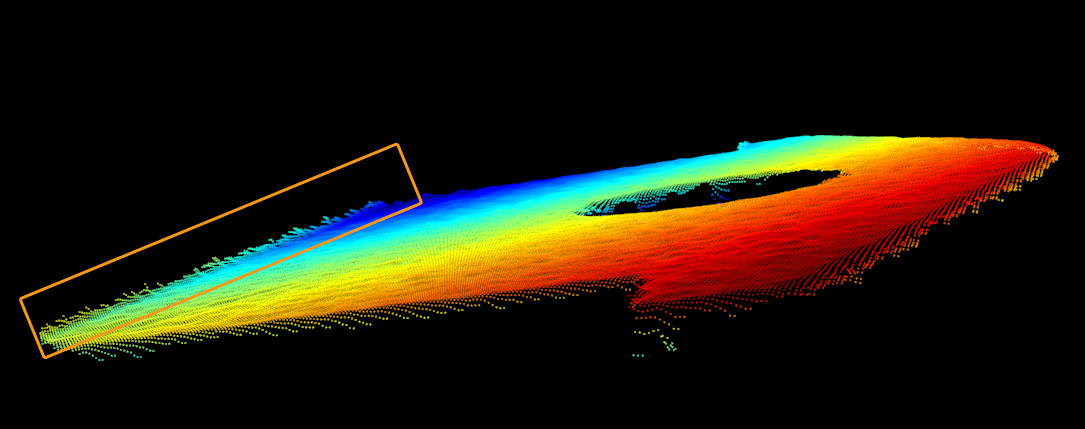
異なる歪み補正の現在の値に設定した(その他のパラメータは同じ)ときに取得した深度画像は以下のようです:
対象物は金属ワークで、表面が平らでエッジの高さのばらつきが大きいです。 |
||
|
||
使用しない |
7 |
9 |
|---|---|---|
|
|
|

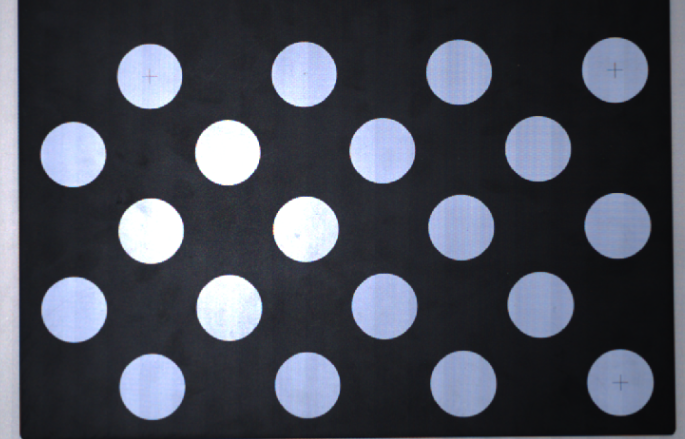
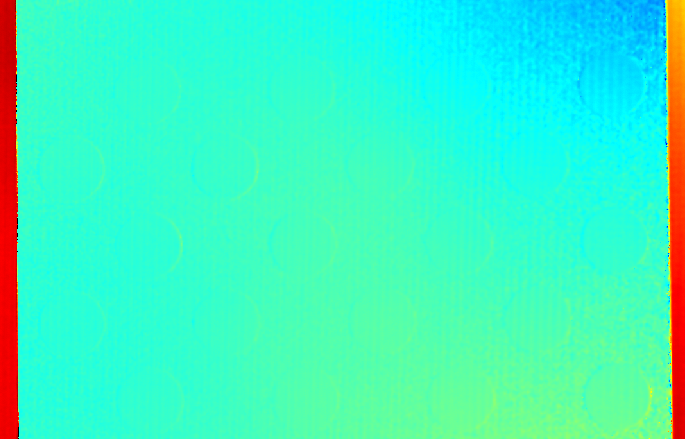
対象物はキャリブレーションボードです。平らな表面で、黒と白、色のコントラストは強いです。 |
|||
|
|||
使用しない |
3 |
7 |
10 |
|---|---|---|---|
|
|
|
|



3.5. 点群補完
パラメータ説明 |
点群の欠損を補完し、より完全な対象物表面データを取得する |
|---|---|
可視性 |
専門、グル |
オプション |
|
調整説明 |
点群の欠損に応じて調整してください |
|
3.6. エッジ保護
パラメータ説明 |
表面平滑化機能を使用するとともにエッジのシャープネスを保持する |
|---|---|
可視性 |
グル |
オプション |
|
調整説明 |
実際のニーズに応じて調整してください |
|
3D パラメータクラスのコーディングモードを透明に設定するとエッジ保護機能は使用できません。 |
3.7. アーティファクト除去
パラメータ説明 |
点群にある対象物の輪郭や曲がる箇所のアーティファクトを除去します。アーティファクトとは、対象物のエッジにはないが遮蔽などにより生じた誤ったデータです。 |
|---|---|
可視性 |
専門、グル |
設定範囲 |
デフォルトではチェックが外れている |
調整説明 |
|
|
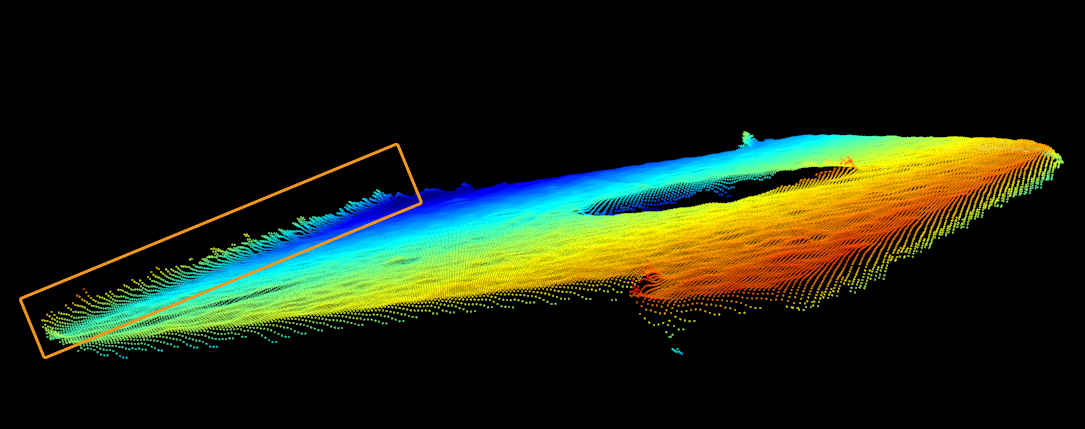
以下図では、黄色い点はアーティファクトです。
|
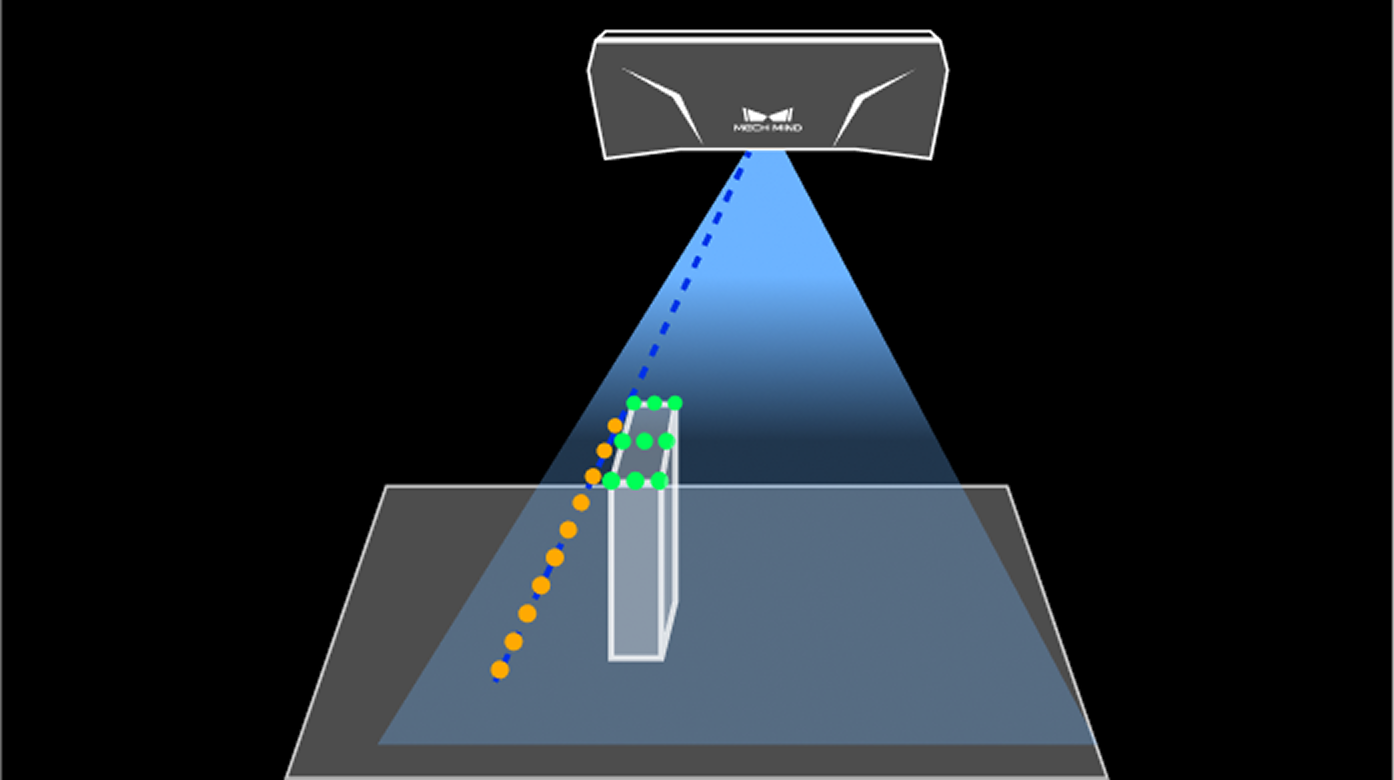
アーティファクト除去機能をオフ・オンにした結果
| オフ | オン |
|---|---|
|
|
4. 深度範囲
パラメータ説明 |
Z 方向の ROI を設定する。カメラ稼働距離の範囲内に深度範囲を設定することで深度範囲外のデータを除去できる |
|---|---|
可視性 |
初級、専門、グル |
オプション |
|
調整説明 |
|
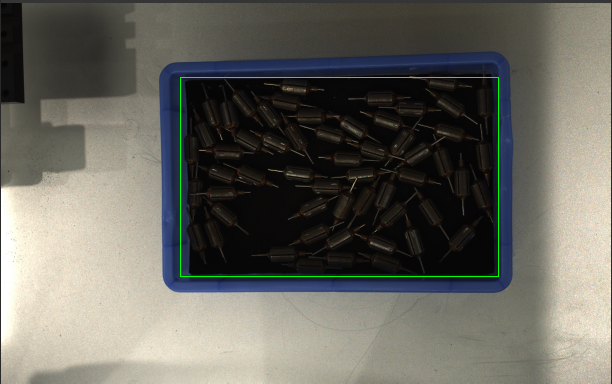
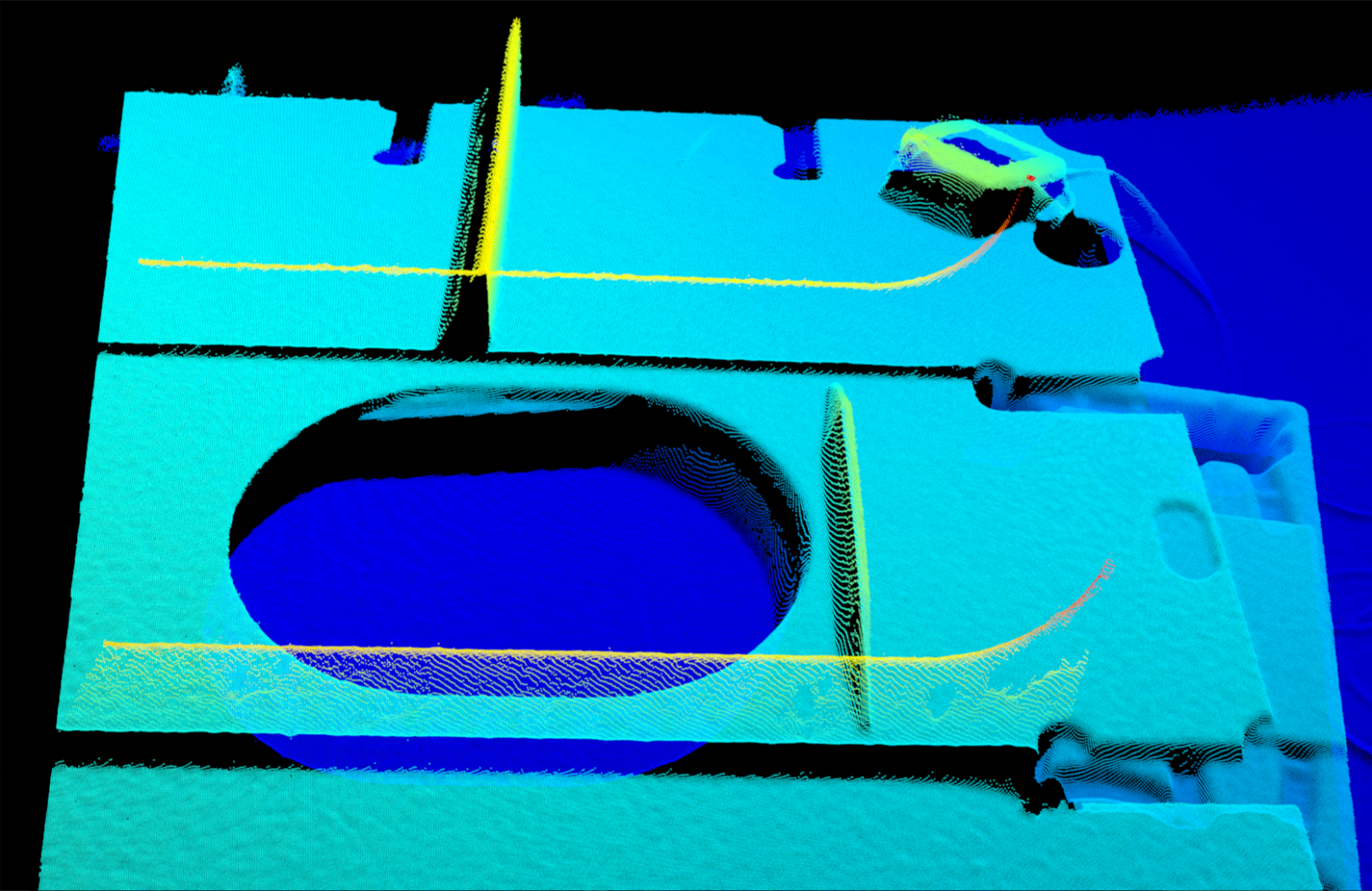
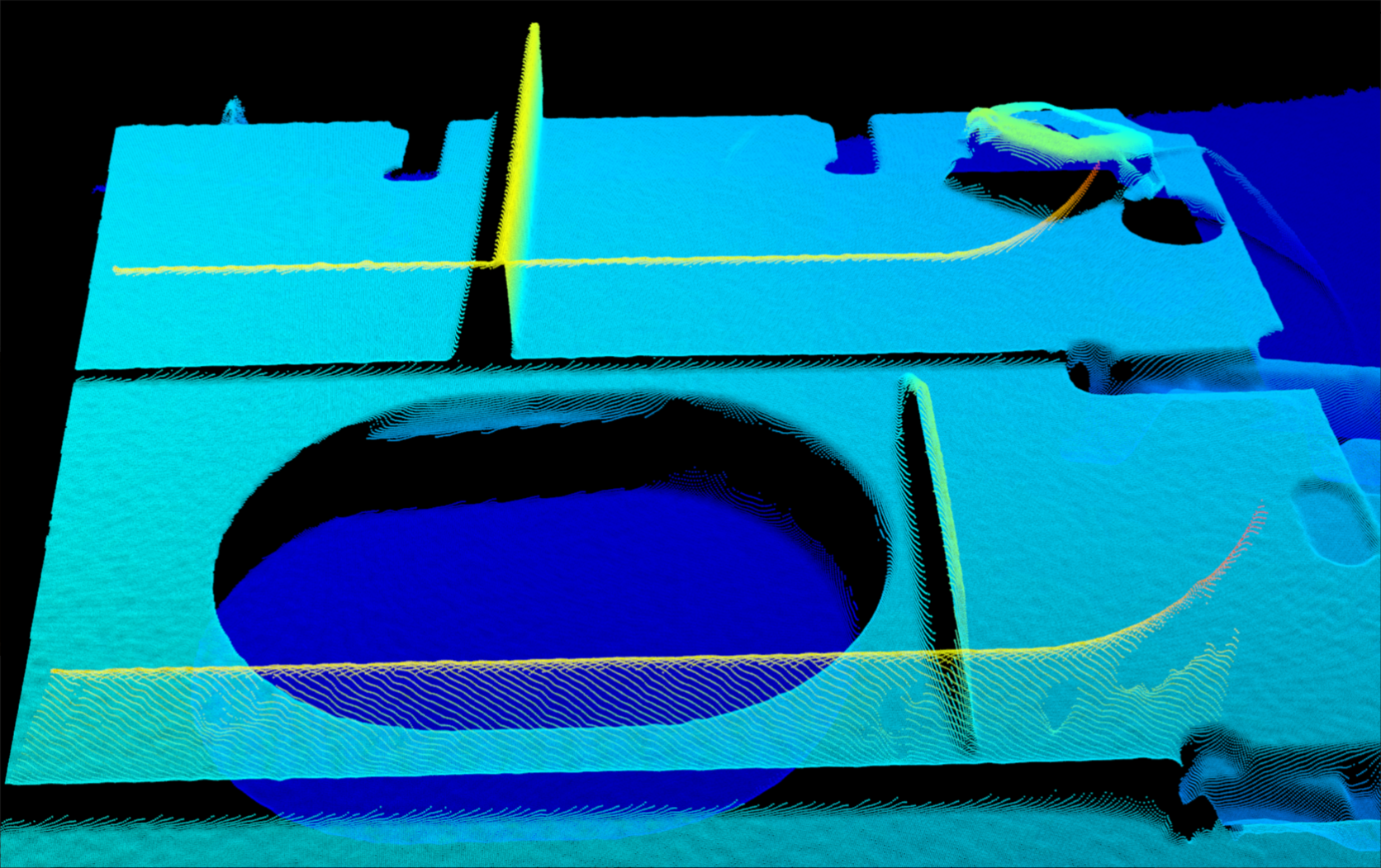
異なる深度範囲の効果の比較は以下の通りです:
| 範囲が広すぎる | 範囲が適切 | 範囲が狭すぎる |
|---|---|---|
|
|
|
|
|
|

深度範囲を設定
以下の手順を実行して深度範囲を調整してください:
-
深度範囲の右の編集をクリックし、深度範囲を設定ウィンドウを開きます。
-
点群を更新をクリックして新しい点群を取得します。
-
点群の位置を調整:深度範囲の上・下限を表示する 2つの灰色の長方形が見えるように調整します。
-
深度範囲調整:スライダーをドラッグして深度範囲を大まかに調整します。それで値を入力して深度範囲を精確に指定します。
深度範囲が適切かを判断:必要なディテールが全部灰色長方形の中にあり、ほとんどのノイズと外れ値はこの領域外にあること。 -
すると、右下の保存をクリックします。
|
5. ROI
パラメータ説明 |
深度画像と点群の XOY 方向の関心領域を設定し、それ以外の点を除去する |
|---|---|
可視性 |
初級、専門、グル |
オプション |
なし |
調整説明 |
ROI 設定をご参照ください |
ROI 設定
-
自動露出 ROI 設定の右の編集をクリックして ROI 設定ウィンドウを開きます。
-
ROI を選択して調整します。ROI をドラッグすることで移動できます。アンカーポイントをドラッグすることで ROI を調整できます。
-
適用をクリックします。
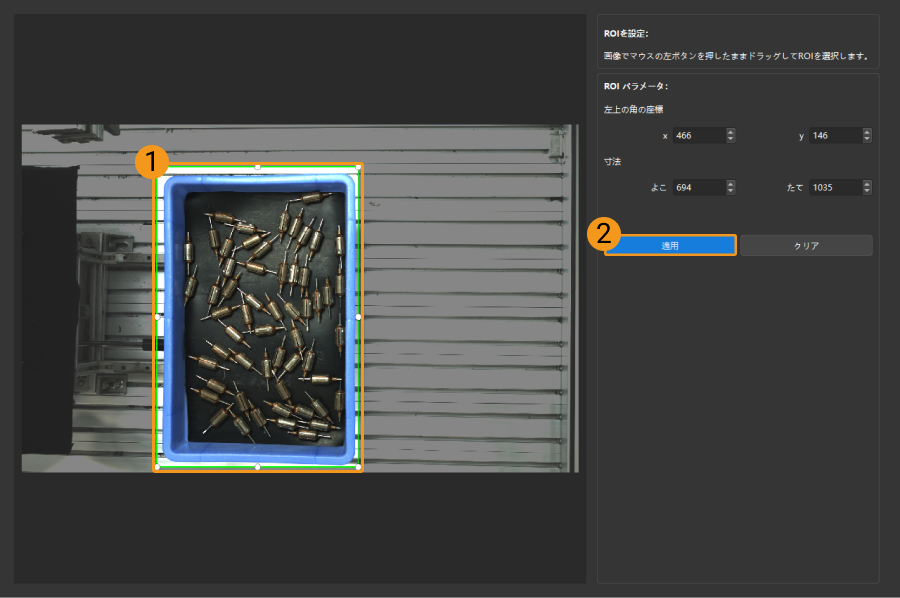
-
クリアをクリックすると設定をクリアできます。
-
-
画像を再度撮影し、深度画像または点群を表示して、設定した ROI の効果を確認します。