涂胶工具¶
涂胶工具说明¶
涂胶工具主要针对框型物体(如汽车舱门)的涂胶路径点的生成。适用于物体类型种类繁多、来料位置任意、涂胶路径复杂、精度要求高的应用场景。
涂胶工具使用(以舱门涂胶为例)¶
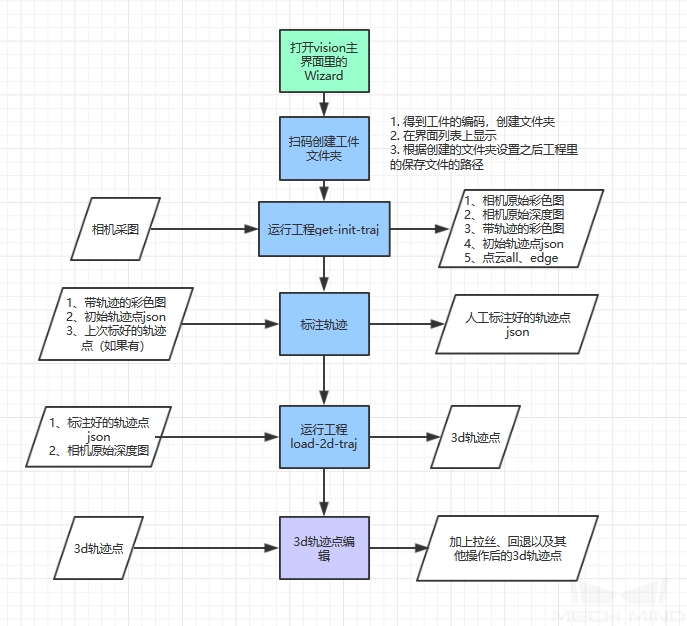
总体流程图¶
准备工作¶
1> 对工件贴白纸,在白纸上涂胶路径的地方画黑线。确保黑线清晰干净、无阴影,必要时增加合适光源。
2> 若工件较薄,造成工件与工作台紧密贴合,需要将工件适当垫高,垫高后的工件依然要保持水平。
3> 在存放工件文件夹(如”D:/MechGlue”)下创建data和project子文件夹,即“D:/MechGlue/data”和“D:/MechGlue/project”。
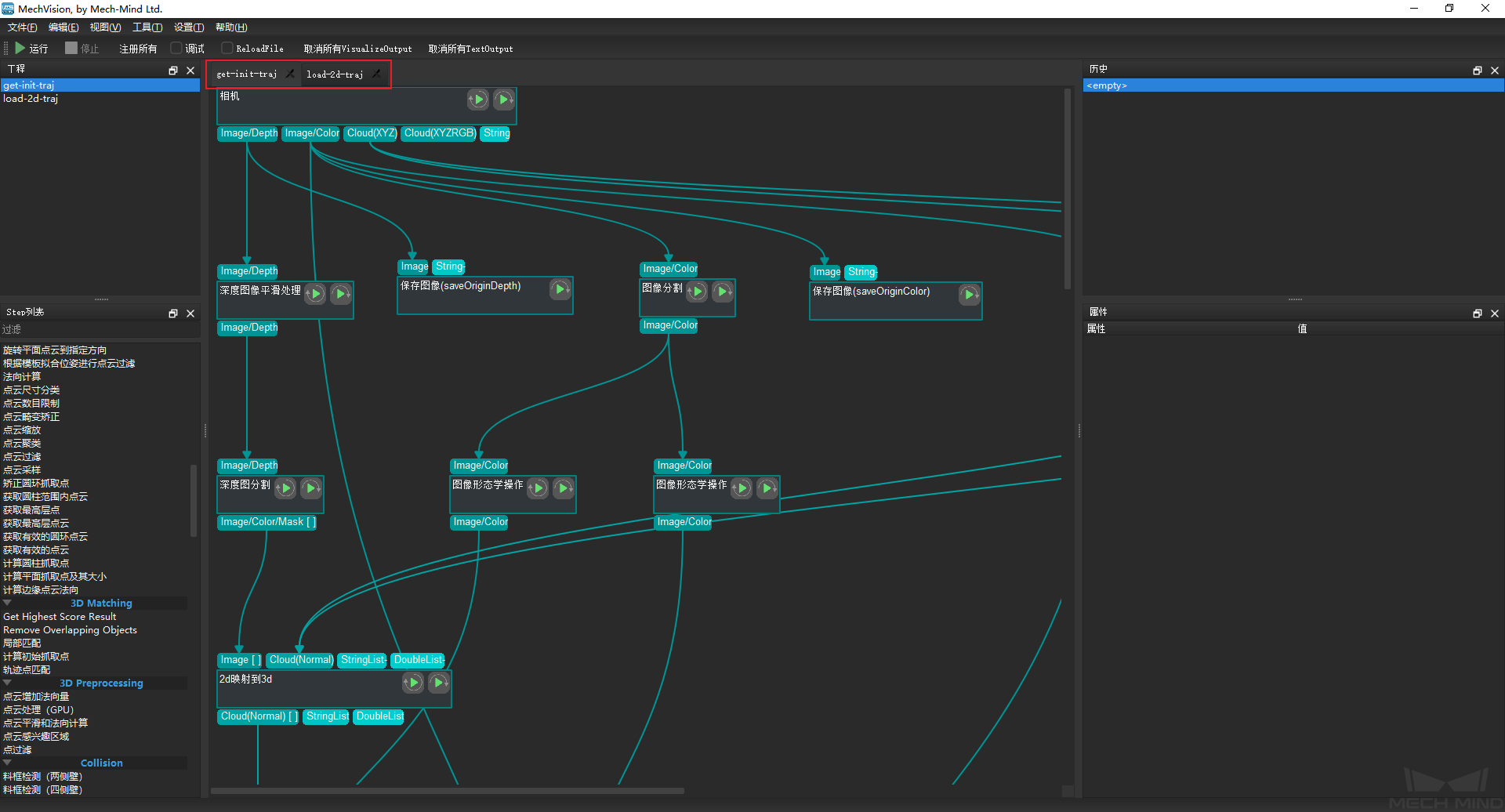
4> 打开Mech-Vision软件,加载”get-init-traj”和”load-2d-traj”工程。
工件信息采集¶
1> 打开Mech-Vision—工具—涂胶工具,信息采集界面及参数说明如下图。
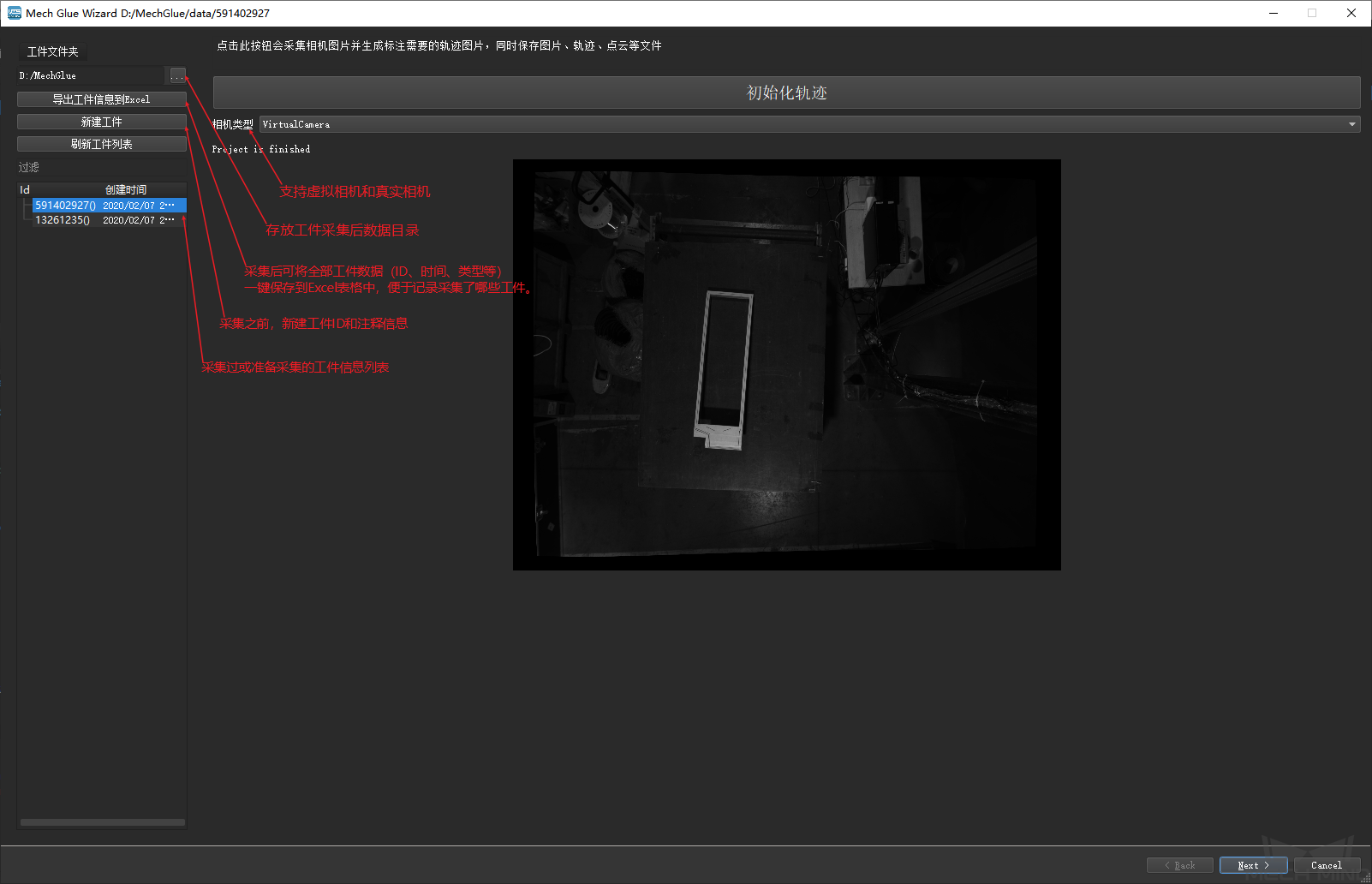
2> 设置存放工件信息文件夹(如“D:/MechGlue”);点击“新建工件”,添加工件ID和备注信息,添加之后会在左侧栏列出;选择合适的相机类型。
3> 点击“初始化路径”进行工件数据采集,后台会运行get-init-traj工程。运行完成后,会自动在data文件夹下创建以工件ID号命名的子文件夹,该文件夹中保存了当前工件的数据信息,包含原始彩色图与深度图、带红色路径线的彩色图、采集该工件所使用工程的备份、工件的全部点云与轮廓点云、工件内轮廓的权重点云、初始2D路径点,如下图所示。运行结束后,可检查工件图像、点云是否为预期所需,如果有问题需检查参数设置及工程。
标记并生成2D路径点¶
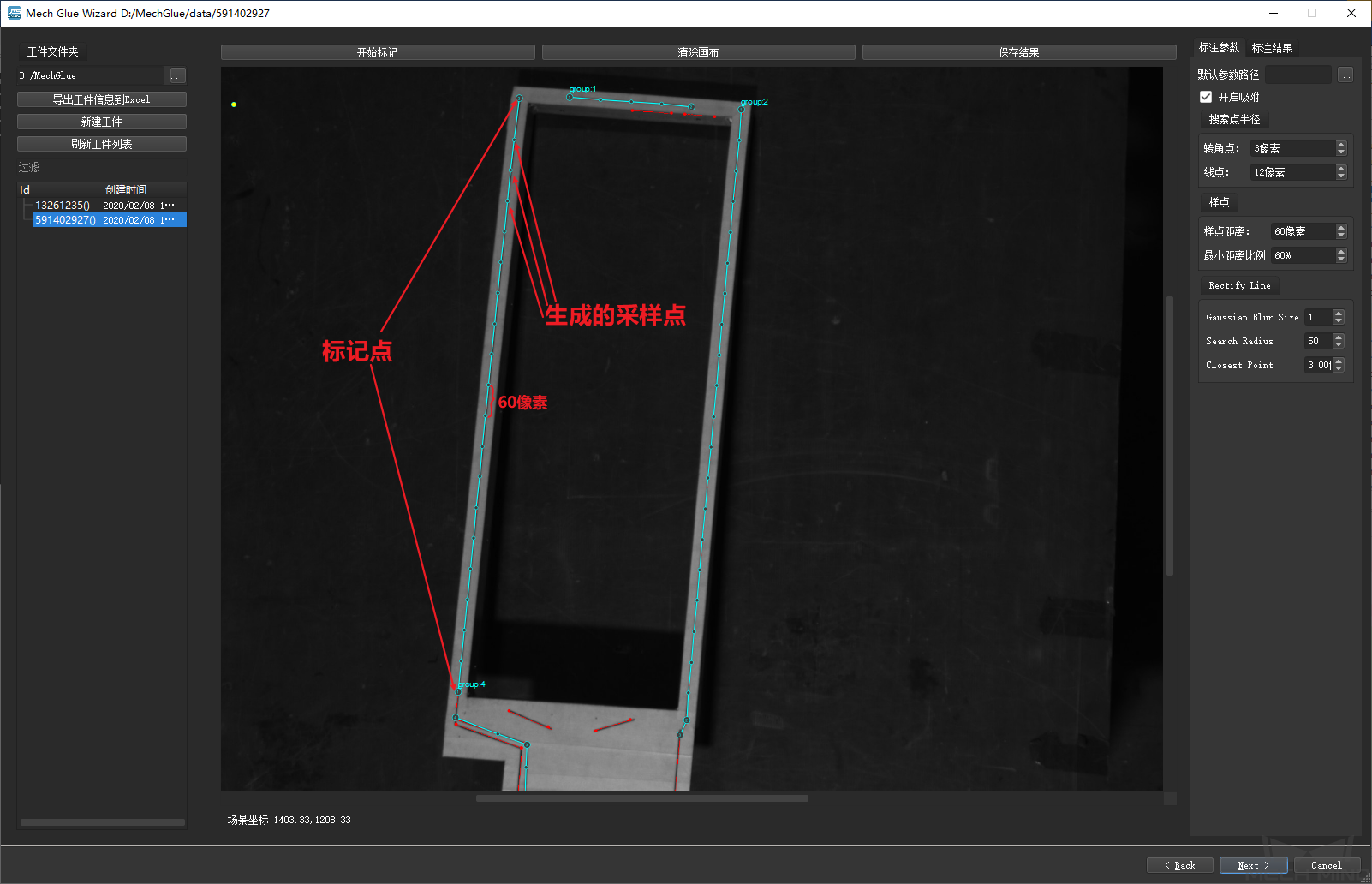
1> 工件信息采集完成之后,点击“Next”到达标记界面,界面及参数说明如下图。
默认参数路径 |
可加载历史参数文件进行参数设置。 |
开启吸附 |
是否开启吸附功能,若开启,在标记时标记点会被吸附到附近的红线上。 |
搜索点半径 |
|
转角点 |
吸附时搜索转角点的半径范围。 |
线点 |
吸附时搜索线上点的半径范围。 |
样点 |
|
样点距离 |
两个标记点之间生成的采样点的距离。 |
最小距离比例 |
最后一个样点与标注点的距离不小于“样点距离”*“最小距离比例”,防止最后一个样点与标注点距离过近。 |
矫正直线 |
|
高斯模糊内核尺寸 |
对轮廓点进行高斯平滑的核函数大小。 |
搜索半径 |
搜索附近轮廓点的搜索半径。 |
最近点 |
附近点的最近距离。筛选出刚好在轮廓上的样本点,保证校正算法的准确性。 |
2> 按照参数说明进行参数设置,点击“开始标记”,然后使用鼠标左键进行标记点标记,标记完一整段之后使用鼠标右键结束此段标记,然后再次点击“开始标记”进行下一段的标记。标记完的线段会在右侧栏“标记结果”中显示。
注意
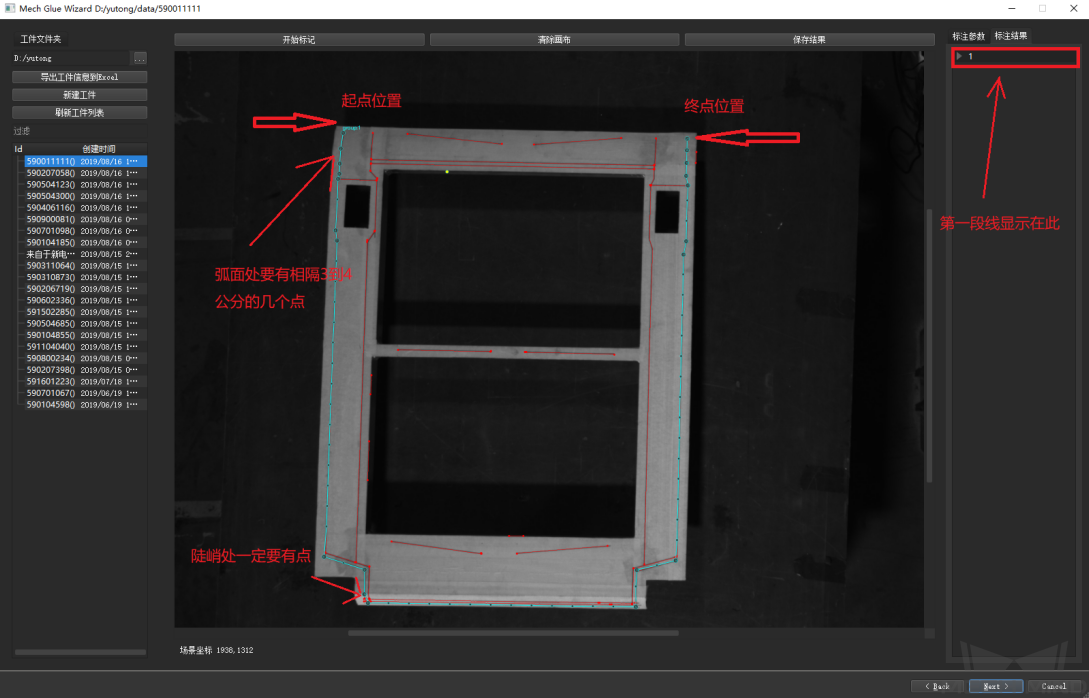
标记时需遵循以下原则:A.只在线段的拐点处进行点的标记,两个标记点之间会根据“采样距离参数”自动生成若干“中间采样点”; B.弧面上要有一定数量的点(如下图中约4个),且点与点之间相隔一定距离(如下图中约3-4CM),避免实际涂胶时,胶枪在弧面处与工件相撞。 C.陡峭处要有标记点。如下图所示。
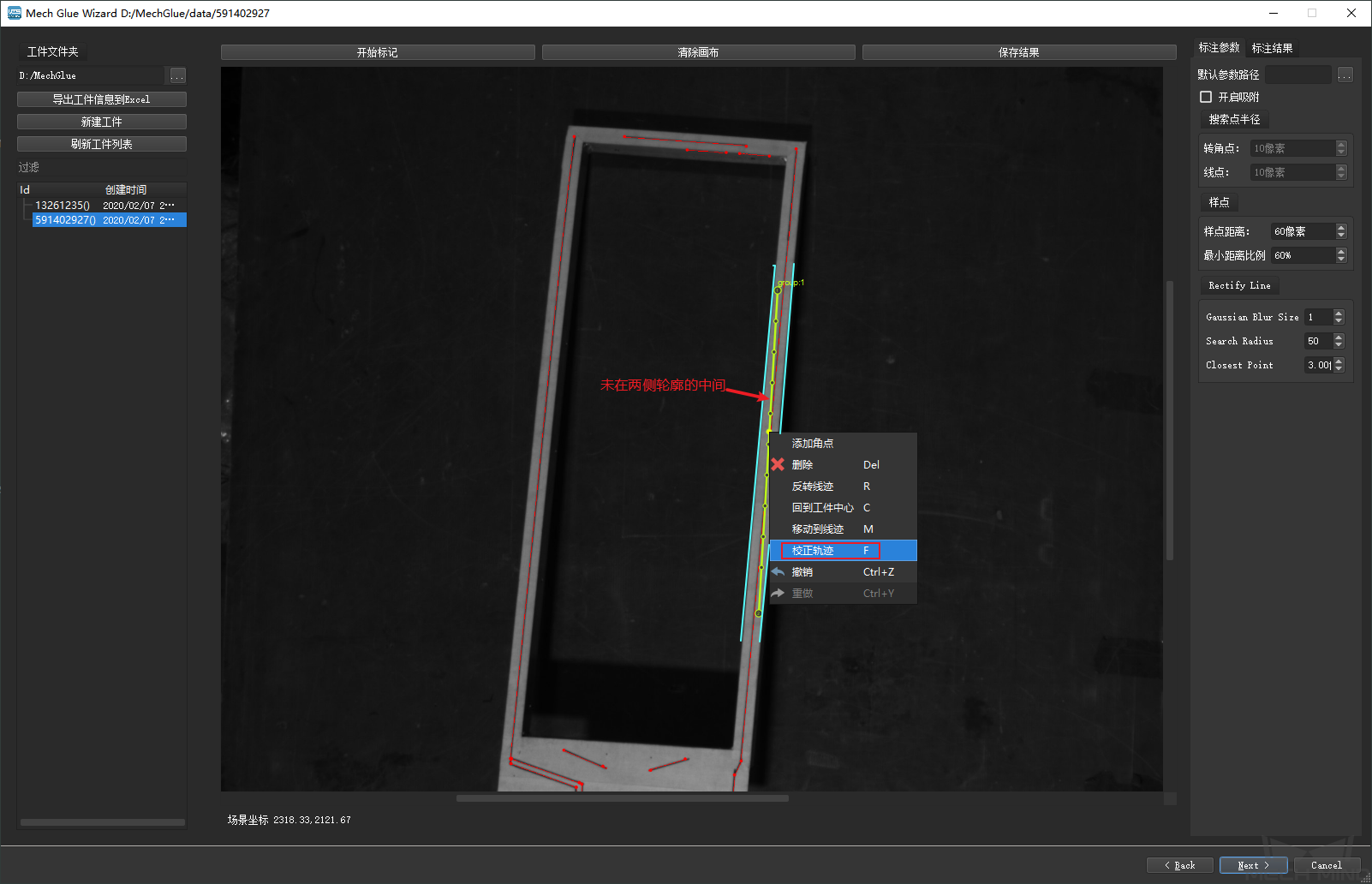
3> 对于整段为直线段部分,若标记完后其路径点未在期望的两侧轮廓中间,可对该直线段的路径点进行矫正(鼠标右键—矫正路径)。如下图所示。
注意
只能对整段为直线段的路径点进行矫正。
4> 若标记失误或标记偏差过大,可点击“清除画布”重新标记。
生成及编辑3D路径点¶
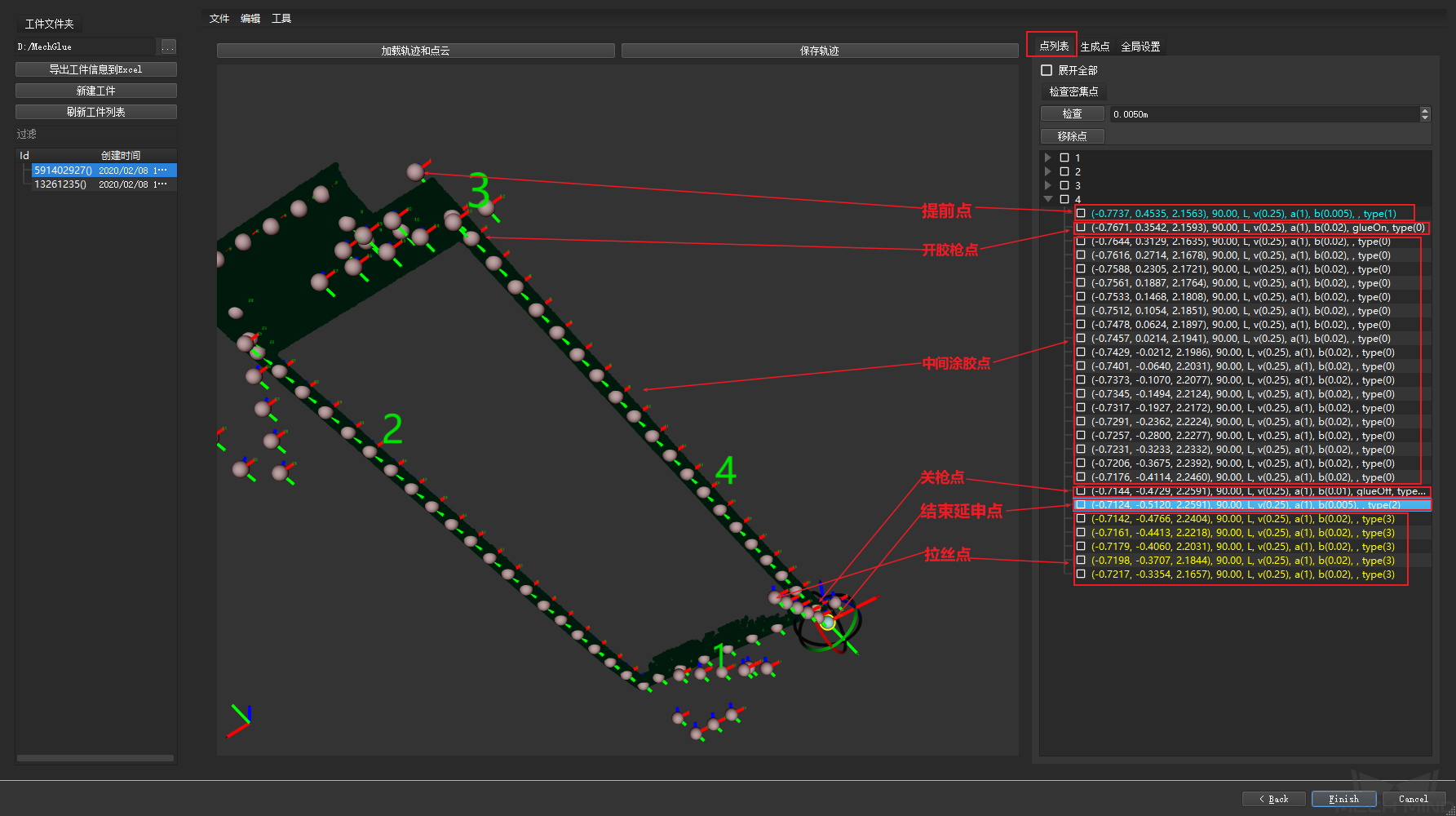
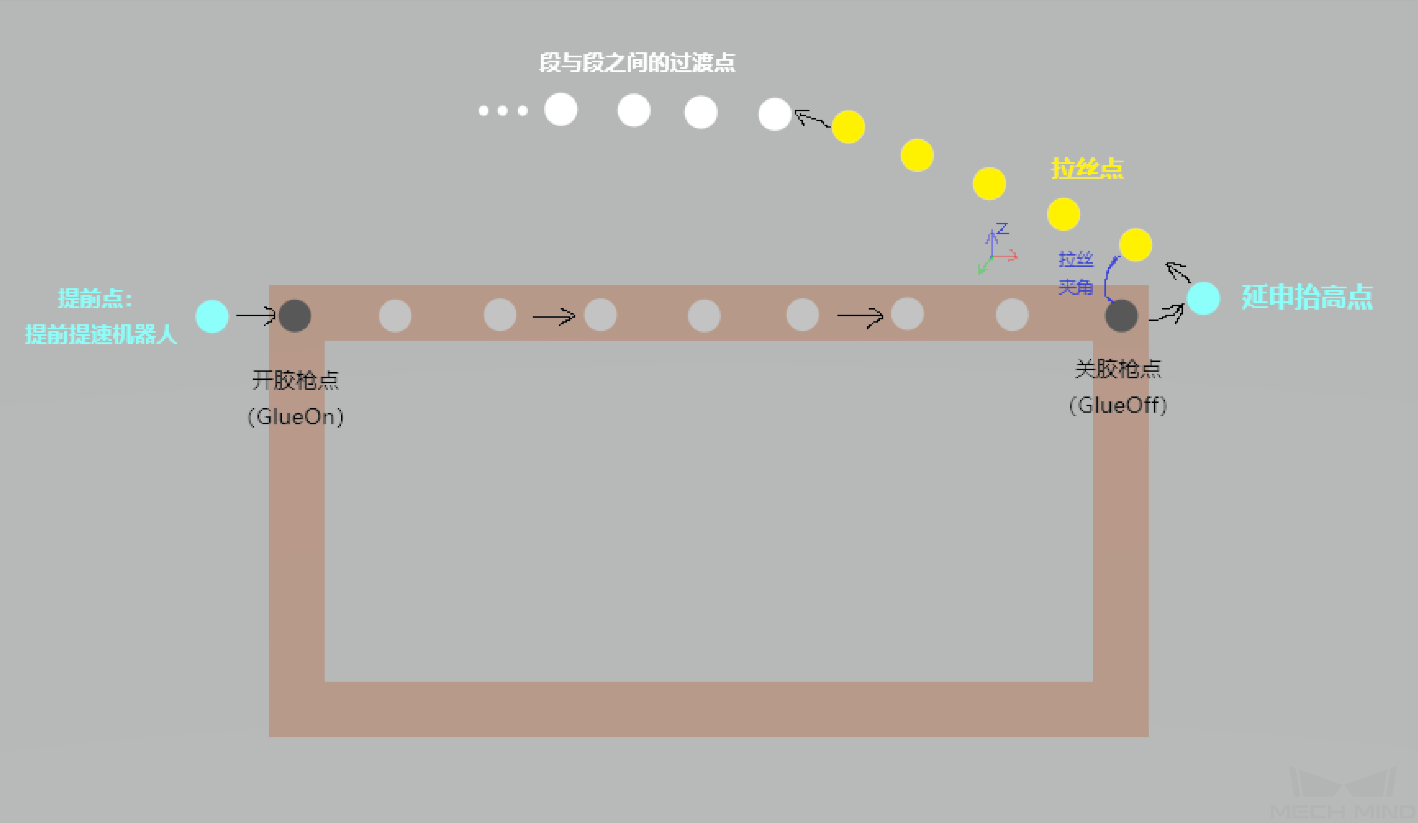
涂胶路径点类型介绍
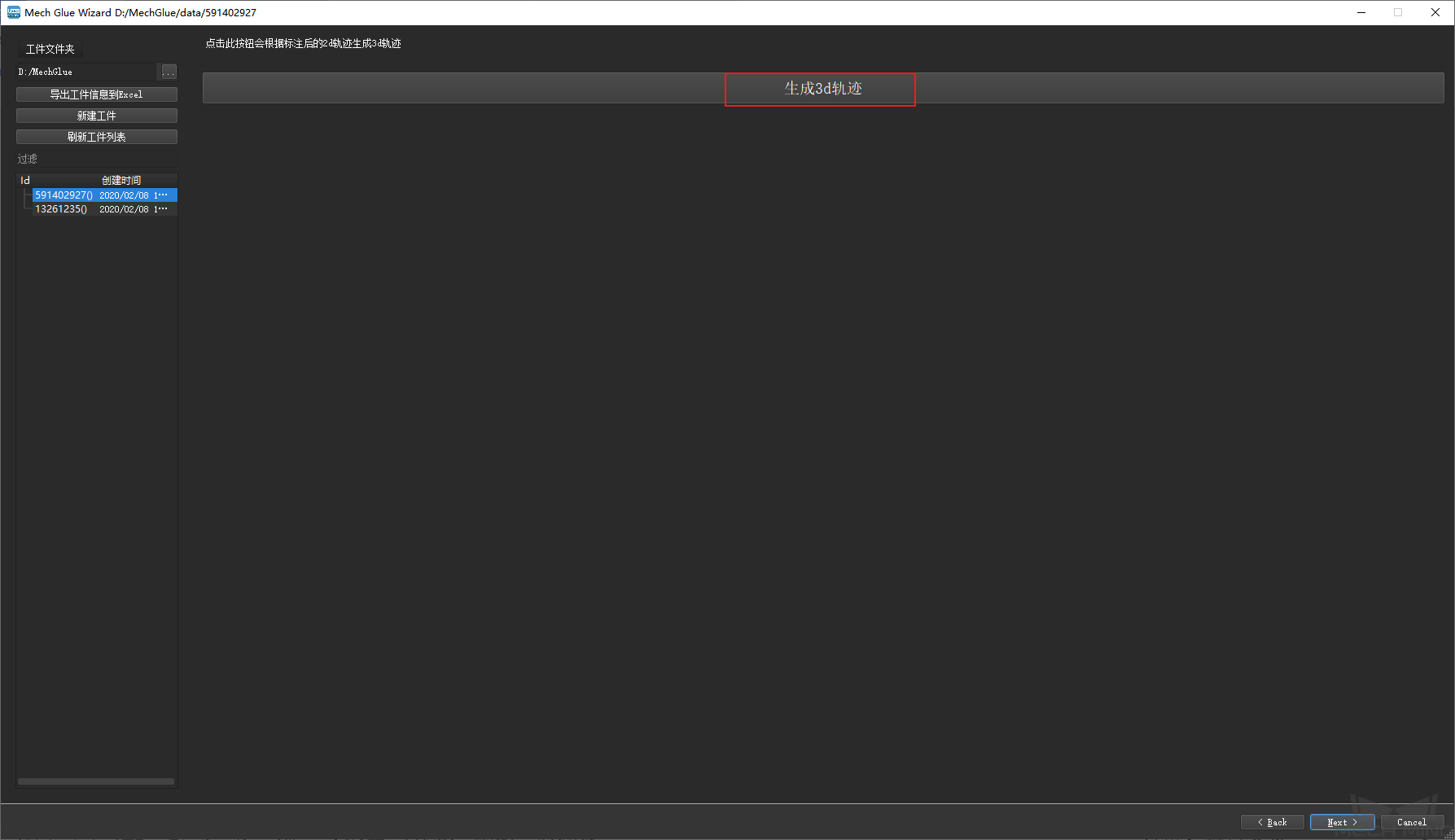
1> 标记界面中点击“保存结果”,然后点击“Next”到达生成3D路径点界面,再点击“生成3D路径点”,此时后台会运行“load-2d-traj”工程,生成初始3D路径点。
2> 编辑并保存3D路径点及其参数。上述“生成3的路径”完成后会跳转到对初始3D路径点的编辑界面,可根据工艺需求对路径点进行调整和参数设置。调整完毕之后,点击“保存路径”报存路径点及其参数,最后点击Finish完成该路径生成。编辑及参数说明如下。
2.1> 全局参数设置
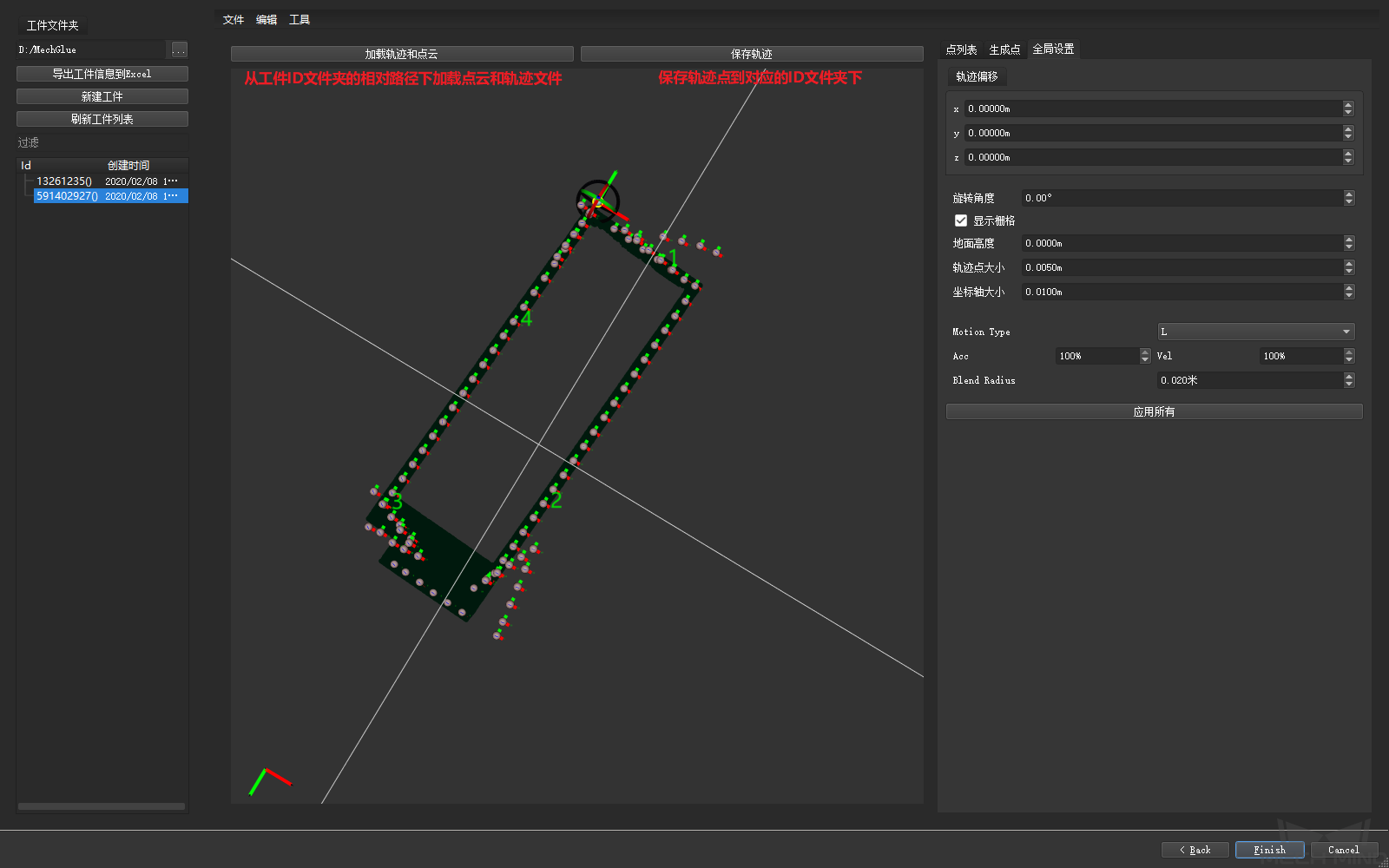
路径偏移 |
将路径整体偏移(针对相机外参存在偏移误差的情况) |
旋转角度 |
对选中的路径点进行绕自身Y轴旋转的角度 |
显示栅格 |
工件大小不一,对与大工件缩小视野后,视野内存在栅格会影响路径点的观察 |
地面高度 |
栅格在Z向高度 |
路径点大小 |
路径点显示的大小 |
坐标轴大小 |
路径点坐标轴长短 |
Motion Type |
运动类型,包含MoveL和MoveJ |
Acc |
加速度 |
Vel |
速度 |
Blend Radius |
转弯半径 |
应用所有 |
点击将会对所有路径点使用以上参数(一般不要点击,特殊点参数也将会被篡改) |
2.2> 特殊参数设置
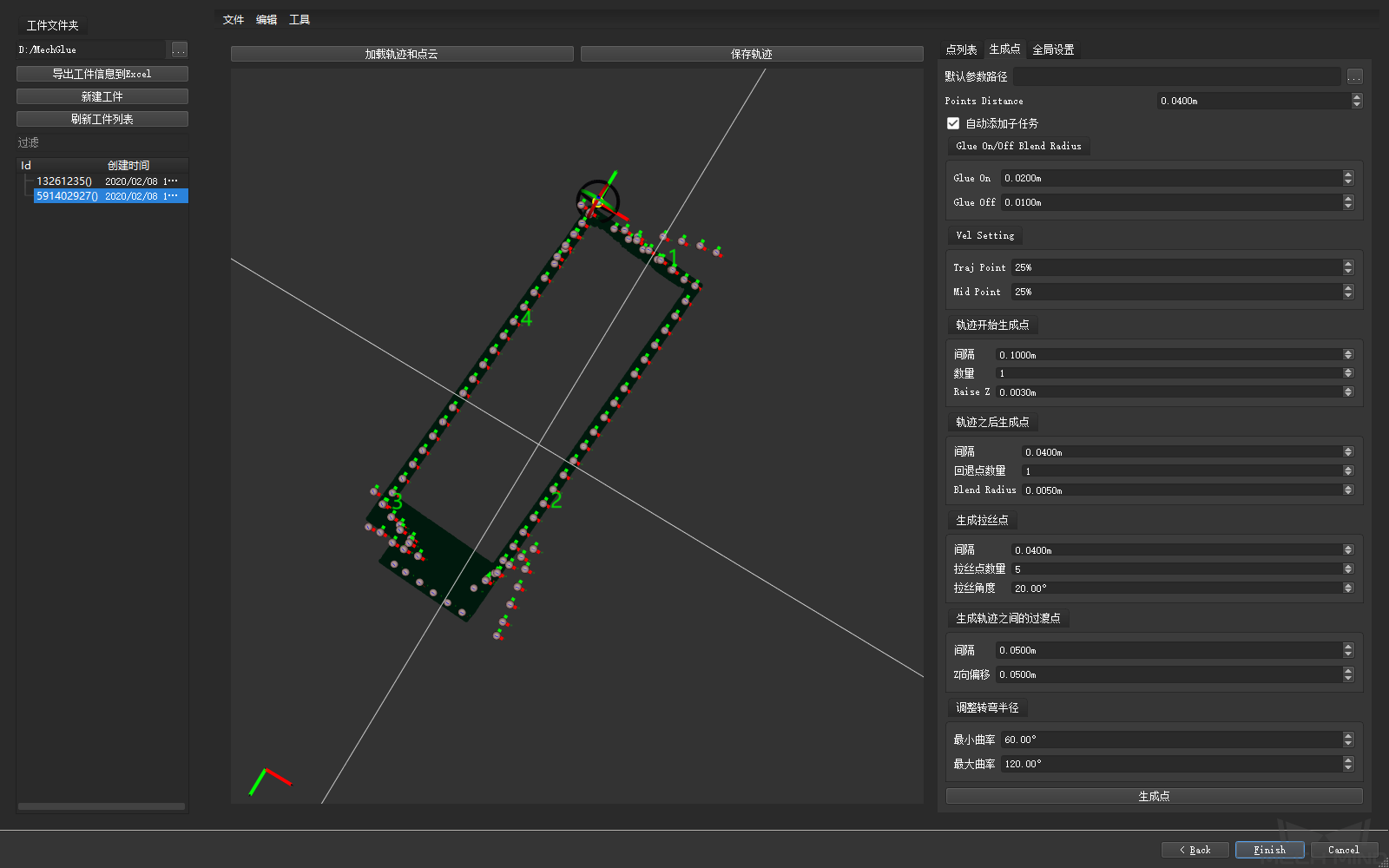
Glue On/Off Blend Radius |
|
Glue On |
开胶枪点的转弯半径。 |
Glue Off |
关胶枪点的转弯半径。 |
Vel Setting |
|
Traj Point |
路径点的速度(除段与段之间过渡点之外的路径点)。 |
Mid Point |
段与段之间过渡点的速度。 |
路径开始生成点 |
|
间隔 |
“提前点”与“开胶枪点”的距离。 |
数量 |
以“间隔”参数距离向前连续生成多个“提前点”。 |
RaiseZ |
将“提前点”抬高一定距离,避免胶枪与其它段已涂的胶体或工件本身碰撞。 |
路径之后生成点 |
|
间隔 |
“结束延申点”与“关胶枪点”的距离。 |
回退点数量 |
以“间隔”参数距离向后连续生成多个“结束延申点”。 |
Blend Radius |
“结束延申点”的转弯半径。 |
生成拉丝点 |
|
间隔 |
“拉丝点”与“结束延申点”、“拉丝点”与“拉丝点”的距离。 |
拉丝点数量 |
以“间隔”距离连续生成多个“拉丝点”。 |
拉丝角度 |
“拉丝点”组成直线与“涂胶点”组成直线的夹角,该角度决定了拉丝点组成直线抬高的倾斜程度。 |
生成路径之间的过渡点 |
|
间隔 |
“过渡点”之间的间隔。 |
Z向偏移 |
为了防止走“过渡点”时胶枪与工件碰撞,需要将过渡点抬高一定距离(以附近最高点云高度为基准)。 |
调整转弯半径 |
目的是为了寻找拐弯处的路径点,然后将此路径点的转弯半径设置为5mm,避免过大的转弯半径导致在拐角处机器人走不到位。 |
最小曲率 |
该路径点处的曲率值在“最小曲率”与“最大曲率”之间,被视为拐弯处的路径点。 |
最大曲率 |
该路径点处的曲率值在“最小曲率”与“最大曲率”之间,被视为拐弯处的路径点。 |
2.3> 3D路径点列表