通过统计数据检查位姿重复精度¶
功能描述¶
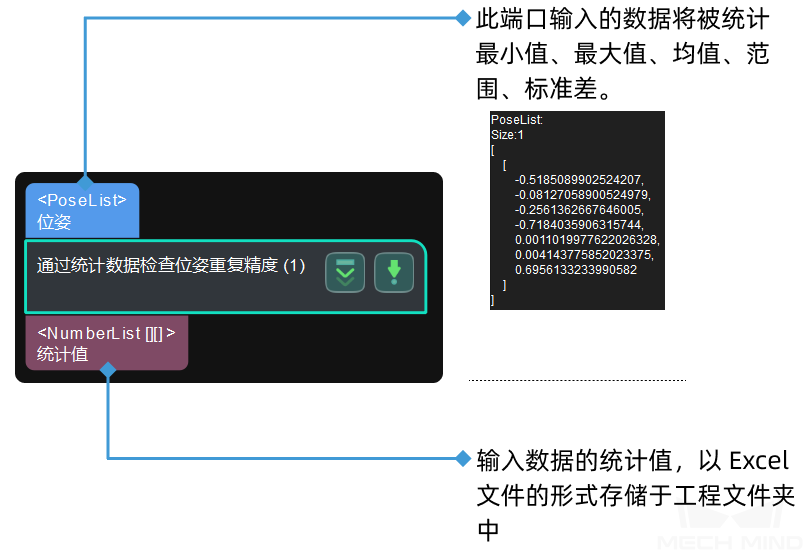
本步骤用于验证视觉工程位姿的稳定性。
通过对同一工件在不同位置进行 10~20 次拍照,来统计该工件在工程中输出的位姿数据(最小值、最大值、均值、范围、标准差),从而判断位姿及其他数据的稳定性。
使用场景¶
本步骤用于检查相机稳定性或验证视觉工程调参有效性。
本步骤可连接于 3D 匹配相关步骤之后,来统计匹配的稳定性。也常连接于工程的 输出 步骤前,使工件位置保持不变,然后令相机采集工件的图像数据,来检验定位的稳定性和识别误差。
输入与输出¶
参数调节说明¶
待统计数据
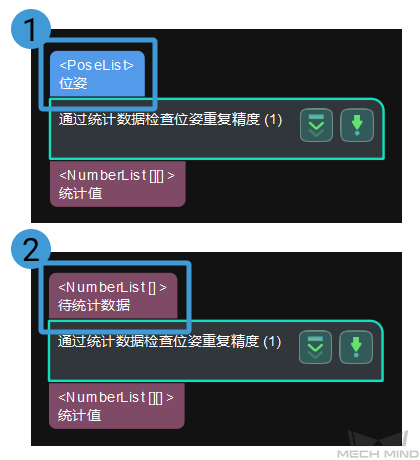
- 输入数据类型
- 默认值:PoseListInput值列表:PoseListInput(输入一组或多组位姿数据) ,NumberListInput(输入其他数据)调节说明:用于选择输入数据类型,不同的输入数据类型对应的输入端口不同。
- 输出数据类型
- 默认值:空间位置与欧拉角统计值。调节说明:用于描述输出数据的类型,无需编辑,保持默认即可。
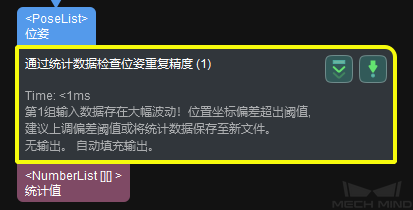
- 可接受的位置坐标偏差阈值
- 默认值:1.0 mm值范围:0~1000调节说明:本参数用于设置可接受的空间位置偏差范围上限。若当前数据与上一数据差值超出设定值,本步骤将报错,如下图所示。例如,若此参数值为 0.1,输入的上一位姿 x 坐标值为 1 ,当前输入位姿 x 坐标值为 0.7 ,则此步骤将报错。
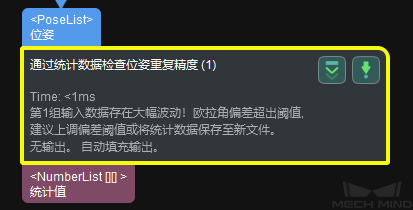
- 可接受的欧拉角阈值范围
- 默认值:0.100°值范围:0~360调节说明:本参数用于设置可接受的欧拉角偏差范围上限。若当前数据与上一数据差值超出设定阈值,此步骤将报错,如下图所示。例如,若此参数值为 5,输入的上一位姿欧拉角中 a 的值为 30,当前输入位姿中 a 的值为 36,则此步骤将报错。
统计数据保存
- 重新开始
- 默认值:不勾选。调节说明:在数据统计时,若由于工件位置发生变化或引入了一组异常数据时,可勾选此项,重新统计数据。勾选后,会在输出的数据中加入“Restart”标记,该步骤成功运行一次后会重置为取消勾选。当用户想要重新统计数据时,可勾选此项,在统计数据文件中,“Restart”标记处的时间戳之后的数据将被计入统计范围(如下图蓝框所示),“Restart”标记处的时间戳之前的数据将不计入统计范围。
- 小数点位数
- 默认值:3值范围:0~8调节说明:本参数用于设置统计数据的小数点后保留的位数。
- 文件基本名
- 默认值:无。调节说明:本参数用于设置保存的统计数据文件的名称。若不设置文件基本名,统计数据文件将以“posesStatistics”命名。
- 保存文件夹路径
- 默认值:无。调节说明:本参数用于设置统计数据文件的保存路径,单击右侧
 按钮即可选择保存路径。若不设置保存路径,统计数据文件将保存至工程文件夹中。
按钮即可选择保存路径。若不设置保存路径,统计数据文件将保存至工程文件夹中。