开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
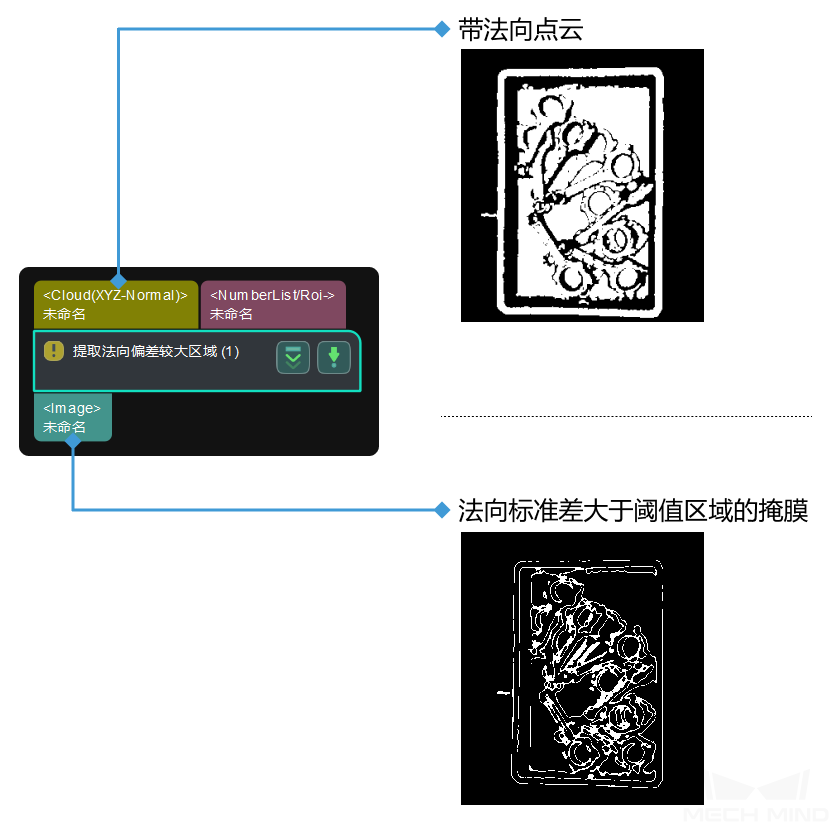
功能描述
提取法向具有较大标准差的区域。法向首先映射到 2D 图像上,然后使用 2D 滤波器计算局部标准差并生成大于设定阈值的掩膜。
使用场景
特殊场景定制步骤。
输入与输出