提取圆柱范围内的点云¶
功能描述
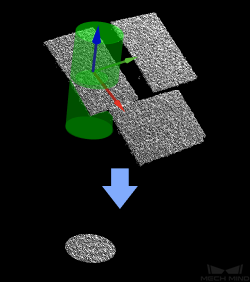
提取指定圆柱体内的点云,圆柱体外的点云会被丢弃。
使用场景
通用的点云提取步骤,无固定的使用场景。
输入与输出
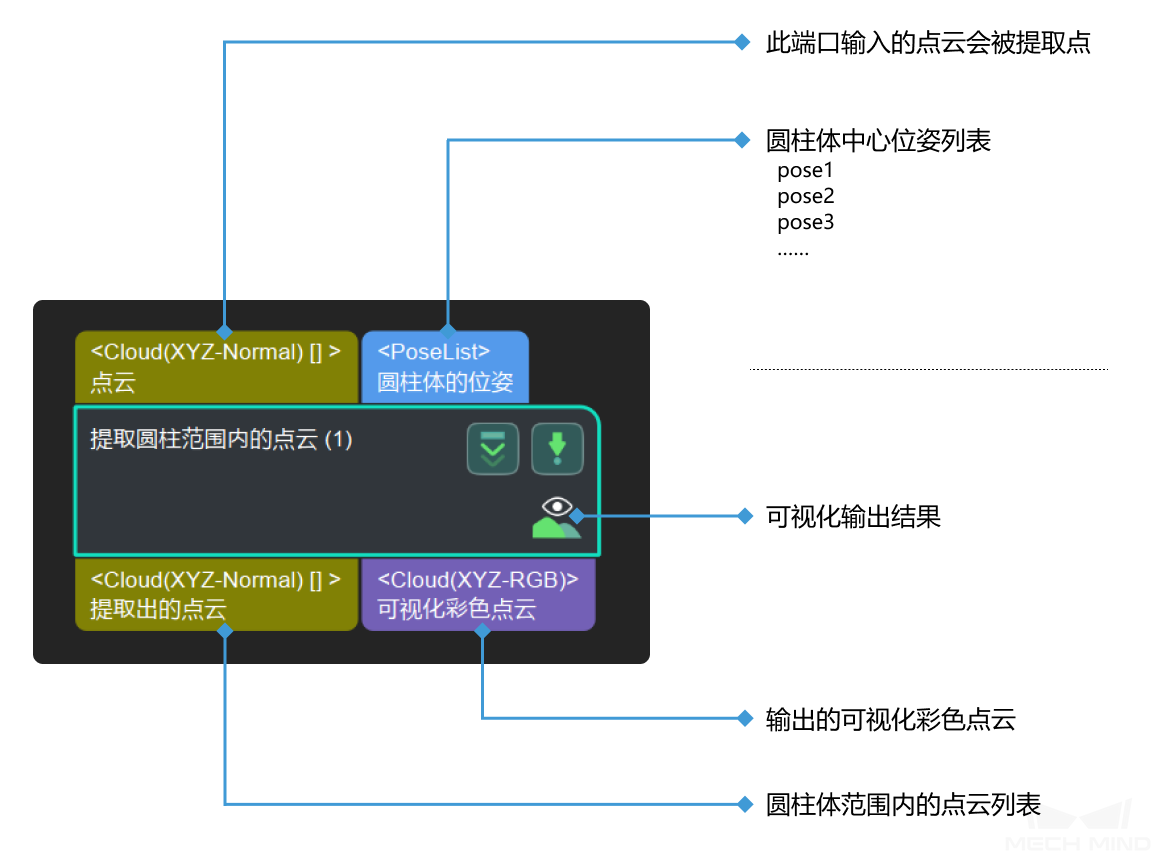
参数说明
- 形状类型
Z方向参数
圆环和扇形半径参数
扇形角度参数
在 形状类型 中选择
Sector之后,以下两属性即可生效,继而可以对扇形的形状进行设置。
- 开始角度
- 结束角度
输入点云的用法设置
- 通过点云中心判断是否物体在圆柱内
- 输入点云的使用方法