Software Suite
v1.6
无标题文档
Mech-Mind
其他版本
版本:
latest
1.5
1.4
1.3
1.2
返回主页
官网
留言
修订历史
PDF下载
退出登录
开始
软件更新说明
软件安装指南
开始你的第一个应用
概览
获取相机及其配件
安装相机
连接整个系统
安装软件并测试连接
实现首次抓取
软件使用指南
Mech-Vision
快速了解 Mech-Vision
开始使用 Mech-Vision
使用示例工程学习 Mech-Vision
Mech-Vision 工程操作基础
典型应用工程使用指南
机器人手眼标定使用指南
步骤使用指南
步骤基础介绍
典型应用场景工程中常用的步骤
2D匹配
2D 特征提取
2D通用处理
3D 匹配
3D特征提取
2D方法估计点云边缘
3D方法估计点云边缘
点云形状检测器
3D通用处理
算术
检测料筐
相机
通信
深度学习
拆垛/码垛
绘制
标签
映射
掩膜处理
测量
元步骤
位姿
Pose2
读取保存
排序
测试
工具
路径
变换
可视化
其它
旧版
步骤组合使用指南
辅助工具使用指南
测量模式使用指南
FAQ
Mech-Viz
Mech-Center
机器人通信配置指南
通信概述
主控通信
标准接口通信
应用指南
梅卡曼德视觉系统搭建
项目部署建议
注意事项
应用案例
附录
软件使用前提
支持
术语表
FAQ
Software Suite
Docs
»
Mech-Vision
»
步骤使用指南
»
3D特征提取
»
3D方法估计点云边缘
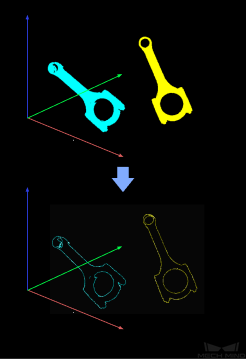
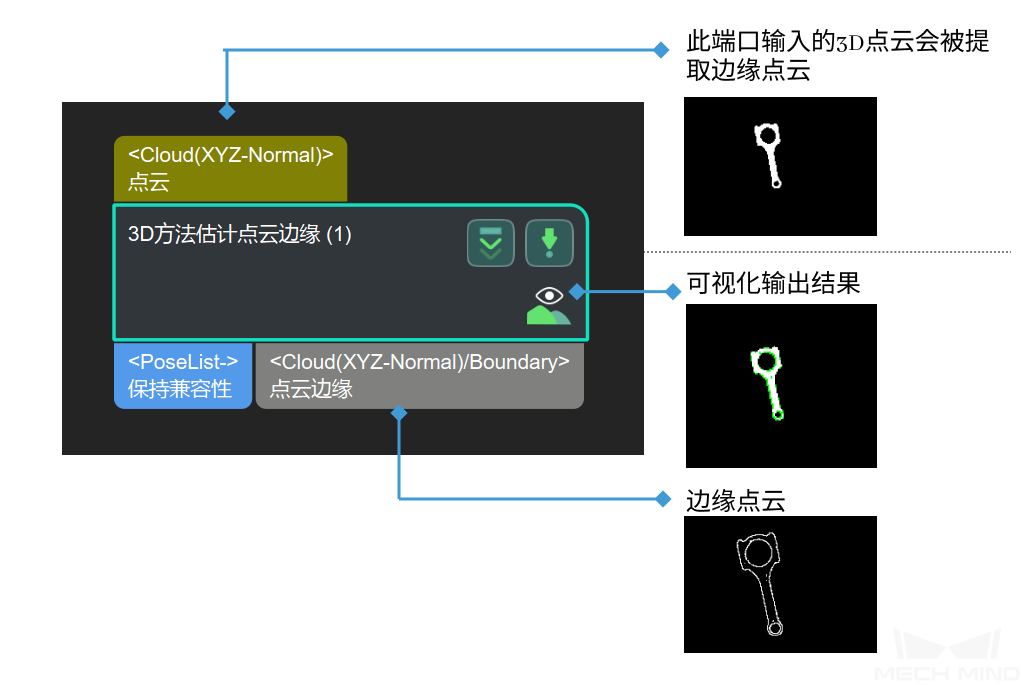
3D方法估计点云边缘
¶
功能描述
提取3D点云的边缘。
使用场景
通常用于使用点云边缘进行匹配,比使用全部点云的匹配速度更快。
输入与输出