2D方法估计点云边缘¶
功能描述
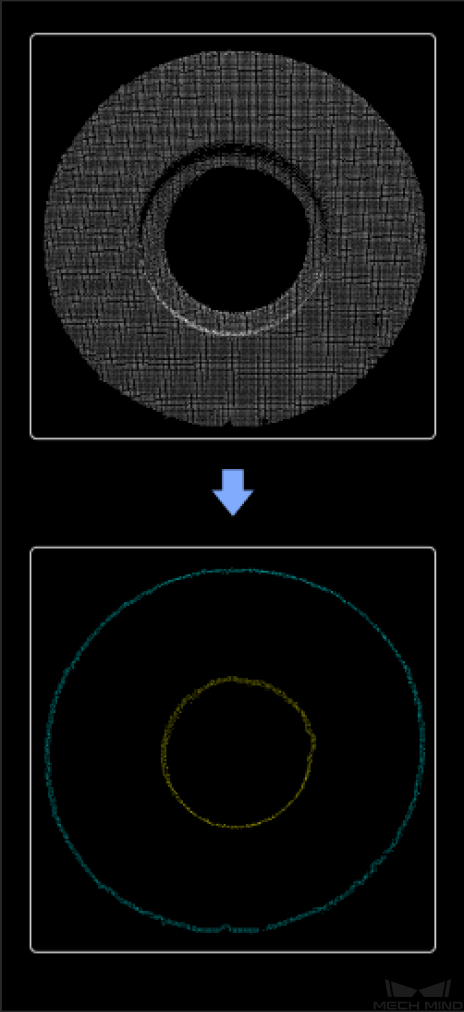
从输入点云中提取点云的边缘。
使用场景
通常使用在平面工件的上料场景,通过此步骤获得平面工件的点云边缘。此步骤通常和3D匹配相关步骤联合使用。 此步骤的运算速度比3D边缘提取的算法更快,推荐在运行时间短、3D点云干扰多,并且只需要提取目标物体的最外层边缘点的场景中使用。
输入与输出
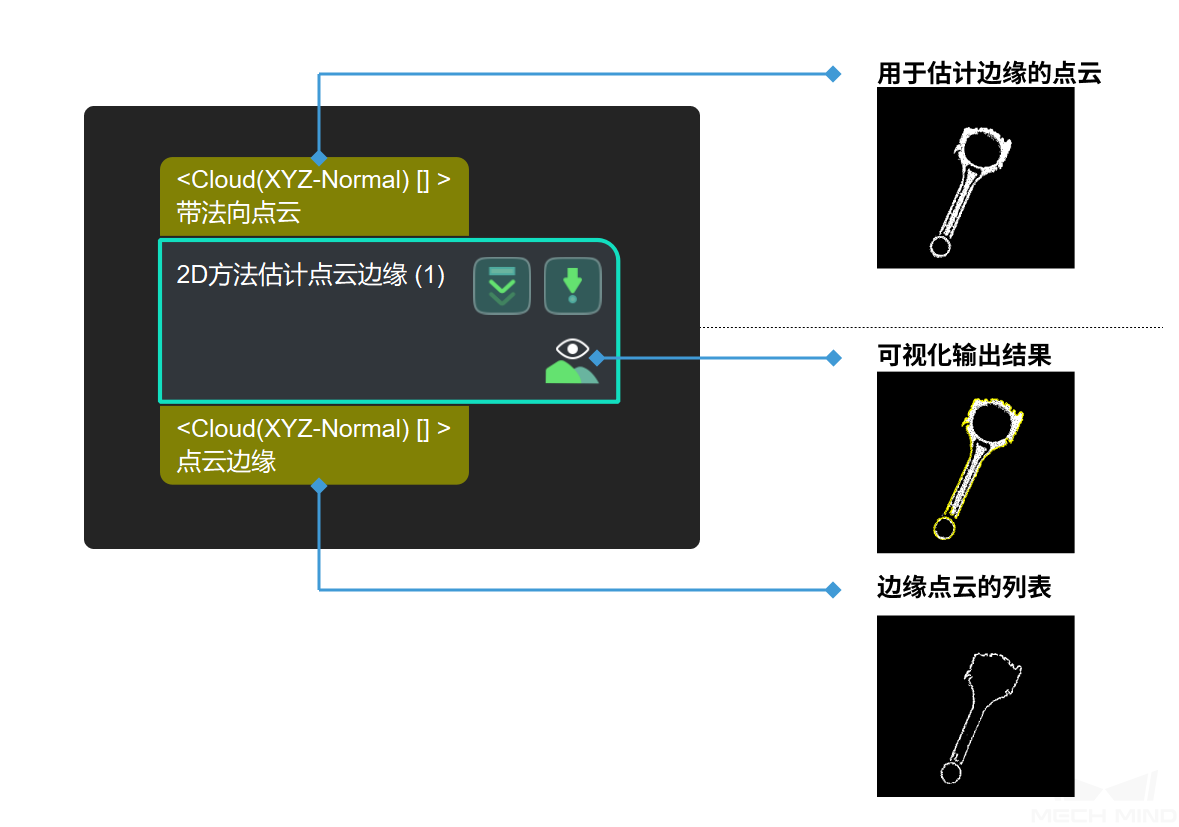
功能描述
从输入点云中提取点云的边缘。
使用场景
通常使用在平面工件的上料场景,通过此步骤获得平面工件的点云边缘。此步骤通常和3D匹配相关步骤联合使用。 此步骤的运算速度比3D边缘提取的算法更快,推荐在运行时间短、3D点云干扰多,并且只需要提取目标物体的最外层边缘点的场景中使用。
输入与输出