开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
常见位姿转换问题主要列举了软件实际使用中常见的变换问题,并给出了对应的解决方法。
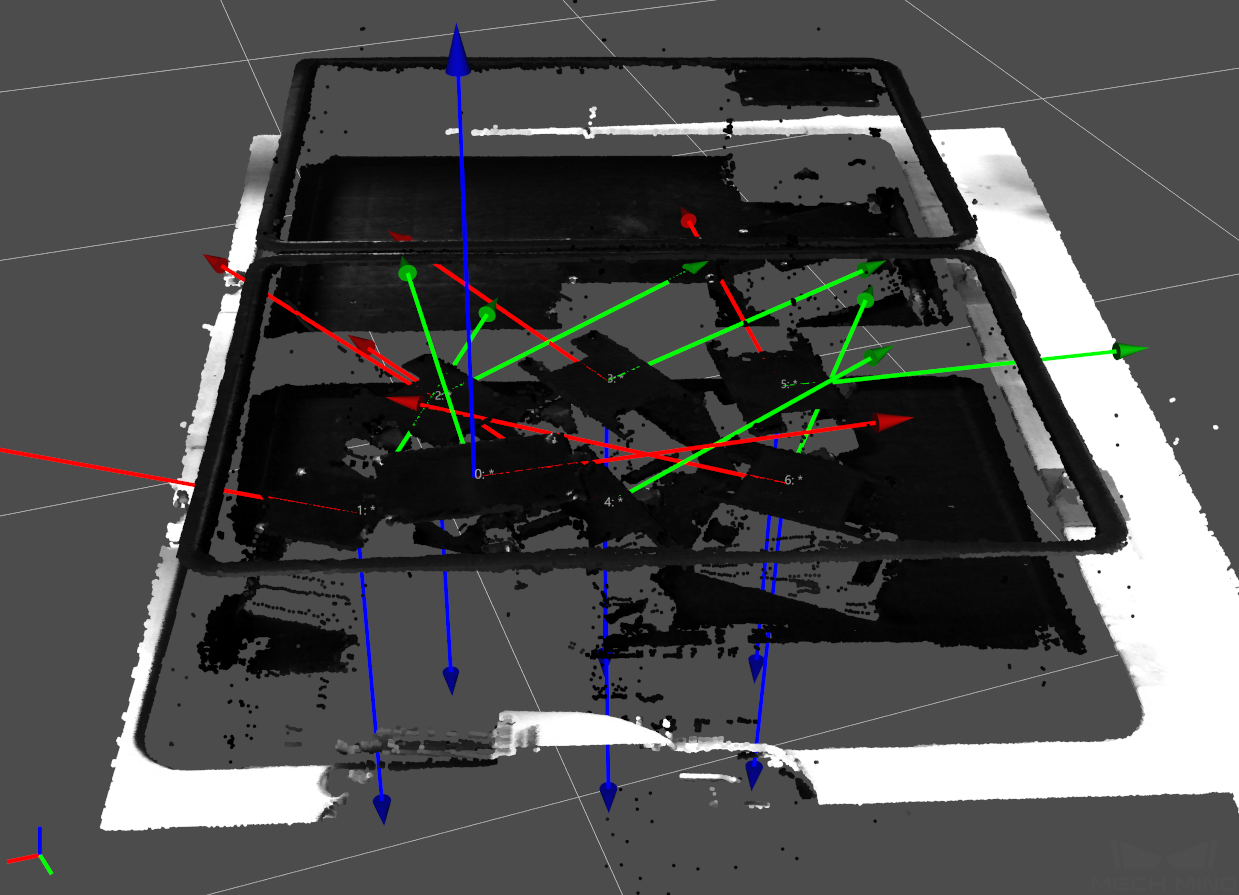
问题描述:实际抓取时需要物体的Z向指向上方的,但是有时会出现识别出的位姿Z向指向下方地面的情况。如 图1所示。
图1 Z向指向地面¶
原因:位姿输出前没有对方向进行检查矫正。
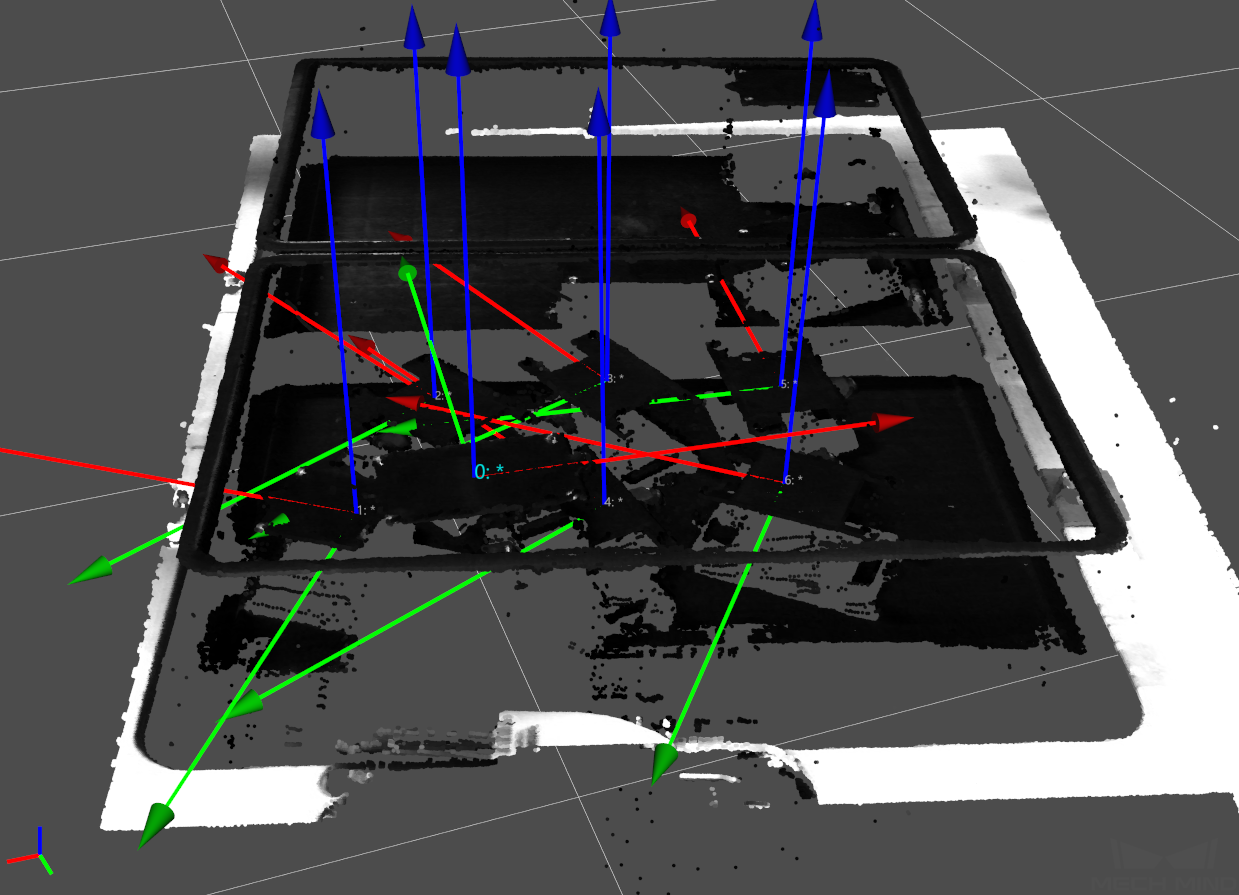
解决方法:添加 翻转位姿的坐标轴方向 步骤,设置好对应参数,对于Z向向下的结果,绕识别结果的x轴旋转180°,参数如 图2所示(具体参数意义和调整方法请查阅对应步骤的说明)。添加后的识别结果如 图3所示。
图2 Flip Axis Direction参数¶
图3 Z向正确的识别结果¶