비전 이동¶
기능 설명
비전 서비스에서 획득된 비전 포즈에 따라 이동합니다.
아웃 포트 |
설명 |
성공함 |
경로 계획 성공 |
계획 실패 |
경로 계획 실패 |
기타 실패 |
계획이 시작하기 전에 비전 이동에 계획에 사용될 수 있는 데이터가 없습니다. 다음과 같은 원인 등이 있습니다. Mech-Vision에서 포즈를 출력하지 않았거나 Mech-Vision에서 포즈를 출력했지만 요구를 충족하는 결과가 없습니다. |
응용 시나리오
일반적으로 로봇이 물체를 피킹하는 데 사용됩니다.
파라미터 설명
이 부분에는
는 선택하지 않았다는 뜻이며
는 선택했다는 뜻입니다.
이동 태스크 기본 파라미터
상세한 설명은 이동 태스크 기본 파라미터 내용을 참조하십시오.
핵심 속성
- 단번에 모든 목표점으로 이동하기
- 비전 결과를 재사용하기
- 비전 결과를 공유하기
오퍼레이터 모드
파라미터 이외의 설정
파라미터 |
설명 |
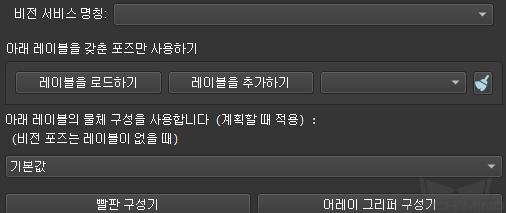
비전 서비스 명칭 |
일반적으로 비전 인식 과 동일한 Mech-Vision 프로젝트를 선택해야 합니다. |
아래 레이블을 갖춘 포즈만 사용하기 |
비전 서비스에서 제공한 비전 결과에 다양한 레이블이 포함될 수 있습니다. 레이블을 선택하면 비전 이동 태스크는 선택한 레이블을 갖춘 포즈만 사용합니다. |
레이블 선택: 레이블을 로드하기 또는 레이블을 추가하기 버튼을 클릭하여 선택하십시오. 레이블을 선택한 후 오른쪽에 있는 언더바에서 해당 레이블 명칭이 표시됩니다. |
|
레이블 삭제: |
|
아래 레이블의 물체 구성을 사용하기(계획에 사용됨) |
다른 작업물은 다른 작업물 구성을 사용하며 다른 레이블과 대응합니다. |
비전 결과에 레이블이 없으면 기본값 을 선택하십시오. |
|
비전 결과에 레이블이 있으면 해당한 레이블을 선택하십시오. |
|
빨판 구성기 |
상세한 설명은 빨판 구성기 내용을 참조하십시오. |
어레이 그리퍼 구성기 |
상세한 설명은 어레이 그리퍼 구성기 내용을 참조하십시오. |