어레이 그리퍼¶
현재 단행 다수 엔드 이펙터만 지원합니다. 어레이 그리퍼 모드를 사용할 때 조절할 수 있는 파라미터는 아래와 같습니다.

공구 구성
- 어레이 그리퍼 구성 파일 경로
 버튼을 클릭하여 어레이 그리퍼 구성 파일을 선택합니다. 어레이 그리퍼 구성기 를 통해 어레이 그리퍼에 대해 구성하고 JSON 파일을 도출할 수 있습니다.
버튼을 클릭하여 어레이 그리퍼 구성 파일을 선택합니다. 어레이 그리퍼 구성기 를 통해 어레이 그리퍼에 대해 구성하고 JSON 파일을 도출할 수 있습니다.
매칭 조건
- 어레이 그리피 매칭 방식
"위치만 체크하기"를 선택하면 "거리 역치" 파라미터만 조절할 수 있으며 "위치와 방향을 체크하기"를 선택하면 "거리 역치"와 "각도 역치"를 모두 조절할 수 있습니다.
- 거리 역치
- 설명: 포즈를 중심으로, 거리 역치를 반경으로 하여 원을 그리고 피킹할 수 있는 위치로 사용합니다.예시
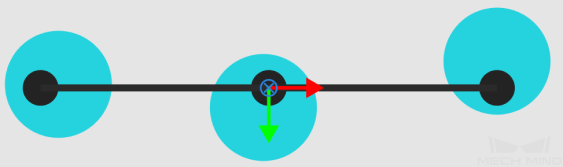
거리 역치가 30mm로 설정되면 피킹할 수 있는 위치는 아래 그림과 같습니다.

아래 그림과 같이 3개의 엔드 이펙터를 갖춘 어레이 그리퍼이며 엔드 이펙터 사이의 간격은 100mm입니다.

피킹을 계획할 때 소프트웨어가 먼저 한 위치를 찾아 공구의 3개 엔드 이펙터를 모두 아래 그림에 있는 파란 동그라미, 즉 피킹 위치에 놓아둡니다.
3개 엔드 이펙터를 전부 매칭하기 어려운 경우 두개만 매칭하십시오.
- 각도 역치
- 설명: 피킹 포즈와 TCP 포즈 사이의 협각입니다.예시
소프트웨어는 공구의 TCP 좌표를 자체 X축을 중심으로 180° 회전하여 Z축이 위쪽을 향하도록 하며 픽 포인트의 방향과 일치하도록 만듭니다.
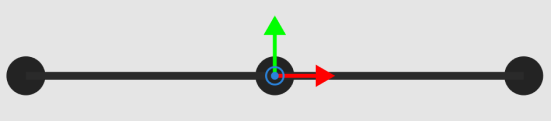
픽 포인트 포즈와 TCP 각 축 사이의 협각을 판단하며 각도가 설정한 각도 역치 범위 내에 있으면 피킹 성공, 범위 외에 있으면 피킹 실패로 판단됩니다.

이 모드에서는 조합에 있는 물체가 누락될 수 있으며 물체가 누락된 조합은 회전한 후 대칭성을 갖지 않습니다. 예를 들어, 어떤 어레이 그리퍼에 엔드 이펙터 4개가 있으며 각각 0, 1, 2 및 3으로 번호가 매겨집니다. 하지만 물체는 3개만 있고 위치가 OOXO인 경우 0, 1, 3 번 엔드 이펙터를 사용해야 합니다. OOXO는 180°를 회전한 후 OXOO 형태가 되어 대칭성을 갖지 않습니다.
피킹 수량
이 파라미터 그룹은 피킹 수량을 계산하는 데 사용되며 남은 피킹 수량을 자동으로 계산합니다. 목표 수량 에 오더 수량을 입력하면 오더 피킹 수량을 계산하고 나머지 오더의 수량을 자동으로 계산할 수 있습니다.
- 목표 수량
피킹할 수 있는 물체의 최대 수량.
- 총 피킹 수량
이미 피킹한 물체의 총수. 이 수치는 소프트웨어에서 자동으로 계산한 것이고 수동으로 수정할 수 없습니다.
- 현재 피킹 수량
현재까지 로봇은 성공적으로 피킹한 물체의 수량. 이 수치는 소프트웨어에서 자동으로 계산한 것이고 수동으로 수정할 수 없습니다.