일반적인 모드¶
일반적인 모드에서 조절할 수 있는 파라미터들은 아래 그림과 같습니다.
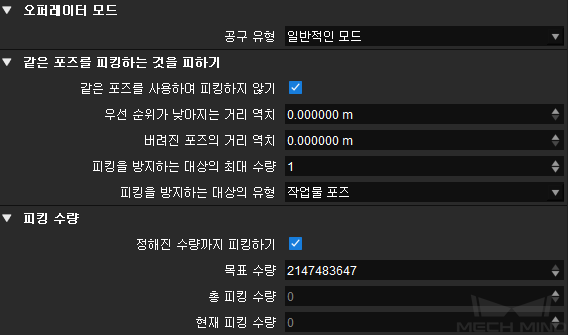
같은 포즈를 사용하여 피킹하지 않기
이 파라미터 그룹은 동일한 픽 포인트에서 반복되는 실패를 피하기 위해 피킹이 실패한 시나리오에서 주로 사용됩니다.
- 우선 순위가 낮아지는 거리 역치
- 기본값: 0설명: 픽 포인트와 앞의 픽 포인트 사이의 직선 거리가 이 수치보다 작으면 두 포즈가 같은 픽 포인트로 판단하여 피킹할 때의 우선 순위를 낮춥니다.
- 버려진 포즈의 거리 역치
- 기본값: 0설명: 픽 포인트와 앞의 픽 포인트 사이의 직선 거리가 이 수치보다 작으면 이 픽 포인트가 버려집니다.응용 예시: 로봇은 크랭크 축을 피킹하는 시나리오에서 처음에 어떤 포즈로 성공적으로 피킹하지 못했지만 크래크 축을 건드렸기 때문에 크랭크 축의 위치가 변했습니다. 위치의 변화로 인해 나중에 피킹할 때 성공할 가능이 있습니다. 따라서 이런 경우에 우선 순위가 낮아지는 거리 역치 파라미터를 선택하여 처음 실패한 포즈를 버리지 않고 우선순위만 낮춥니다. 하지만 어떤 포즈로 피킹할 때 크랭크 축이 전혀 움직이지 않고 다시 피킹을 시도하더라도 성공할 수 없는 경우 반복된 실패를 피하기 위해 직접 파라미터 버려진 포즈의 거리 역치 를 사용하십시오.
- 피킹을 방지하는 대상의 최대 수량
- 기본값: 1설명: 피킹을 방지하는 대상(작업물의 포즈 또는 작업물)의 최대 수량.응용 예시: 가령 이 파라미터의 수치를 2로 설정했는데 실제로 Mech-Vision에서 포즈 3개를 출력했고 피킹에 모두 실패했습니다. 이런 경우에 피킹에 실패한 포즈1, 포즈2, 포즈3은 각각 포즈1, 포즈2, 포즈3으로 리스트에 기록됩니다. 지금 리스트에 있는 "피킹을 방지하는 대상", 즉 리스트의 길이는 3인데 파라미터에서 이미 2로 설정되었기 때문에 순서대로 리스트 맨위에 있는 포즈1을 지우고 포즈2 및 포즈3만 기록합니다.
- 피킹을 방지하는 대상의 유형
- 작업물 포즈: 대상 물체의 포즈에 따라 기록합니다. 가령 어떤 물체는 픽 포인트 3개가 있으며 그중 하나만 피킹되었다는 것으로 기록되면 나머지 두개는 아직 피킹되지 않았다는 것으로 기록됩니다.작업물: 대상 물체에 따라 기록합니다. 가령 어떤 물체의 한 포즈가 이미 피킹되었다는 것으로 기록되면 다음에 피킹할 때 이 물체의 모든 포즈가 다 피킹되었다는 것으로 기록되어 우선으로 이 물체를 피킹하지 않습니다.
피킹 수량
이 파라미터 그룹은 피킹 수량을 계산하는 데 사용되며 남은 피킹 수량을 자동으로 계산합니다. 목표 수량 에 피킹의 목표 수량을 입력하면 피킹 수량을 계산하고 나머지 수량을 자동으로 계산할 수 있습니다.
- 목표 수량
피킹할 수 있는 물체의 최대 수량.
- 총 피킹 수량
이미 피킹한 물체의 총수. 이 수치는 소프트웨어에서 자동으로 계산한 것이고 수동으로 수정할 수 없습니다.
- 현재 피킹 수량
현재까지 로봇은 성공적으로 피킹한 물체의 수량. 이 수치는 소프트웨어에서 자동으로 계산한 것이고 수동으로 수정할 수 없습니다.