프로젝트 상세 설명¶
프로젝트 프로세스¶
물체의 유형과 모양이 불확실하고 매칭된 모델이 없기 때문에 딥 러닝 방법을 사용하여 픽 포인트를 예측합니다.
임의의 물체 피킹 (빈 없음) 프로젝트의 프로세스는 아래 그림과 같습니다.
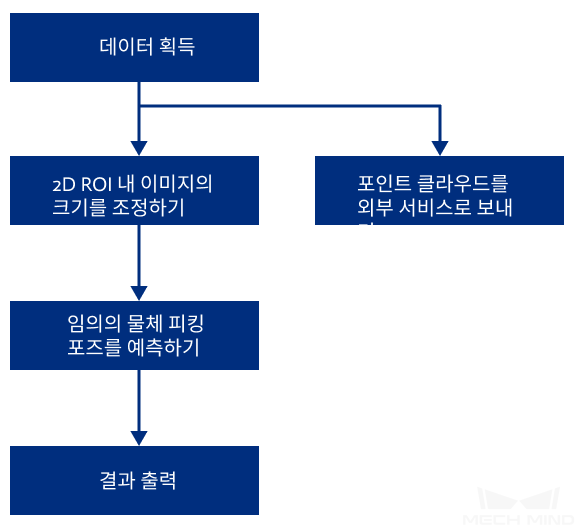
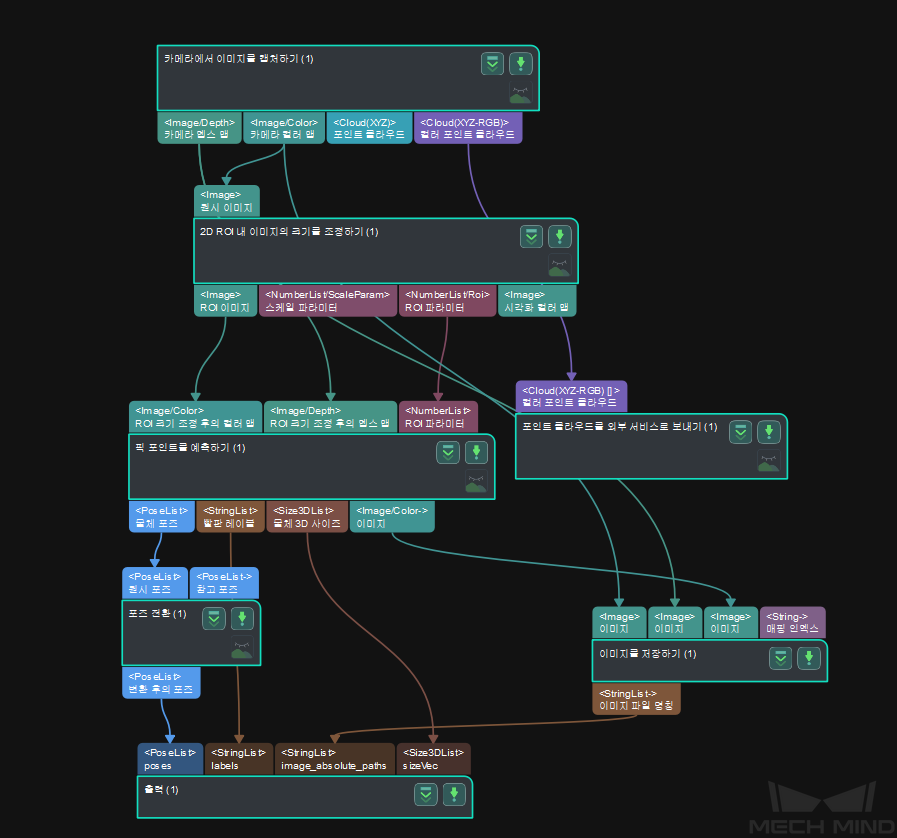
이 프로젝트의 스크린샷은 아래 그림과 같습니다.
관련된 스텝에 대한 자세한 설명¶
카메라에서 이미지를 획득하기¶
이 스텝은 Mech-Vision과 카메라 간의 통신을 구현하는 데 사용됩니다. 이 스텝을 통해 시나리오의 뎁스 맵, 컬러 맵 및 포인트 클라우드를 획득하여 후속 비전 계산을 위한 데이터를 제공할 수 있습니다.
이 스텝에 대한 자세한 내용은 카메라에서 이미지를 캡처하기 를 참조하세요.
2D ROI 내의 이미지 크기를 조정하기¶
이 스텝은 ROI를 지정된 크기로 조정하는 데 사용됩니다. 물체의 포즈 예측 결과는 ROI 영역과 크기 조정 비율에 크게 영향을 받으므로 더 나은 포즈 결과를 얻으려면 ROI 영역과 크기 조정 비율을 잘 조정해야 합니다.
이 스텝에 대한 자세한 내용은 深度学习部署ROI设置 를 참조하세요.
임의의 물체 피킹 - 포즈를 예측하기¶
물체의 유형과 모양이 불확실하기 때문에 딥 러닝 방법을 사용하여 픽 포인트를 예측합니다. 사용할 스텝은 픽 포인트를 예측하기(임의의 물체) 입니다.
컬러 맵, 뎁스 맵, ROI 파라미터를 입력한 후 딥 러닝 알고리즘을 사용하여 다음을 얻을 수 있습니다. 카메라 좌표계에서 피킹 가능한 물체의 표면 포즈(아래 그림 참조), 피킹 가능한 물체의 3D 치수, 피킹 가능한 물체 표면과 대응하는 빨판 레이블.
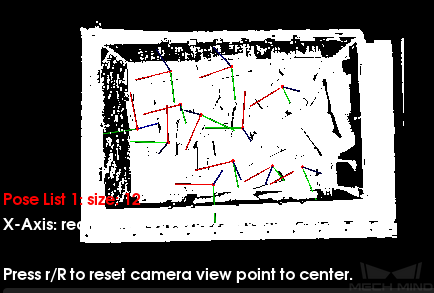
이 스텝에서 영역 레이블이 표기된 이미지도 실시간으로 표시할 수 있으며 사용자는 시각화 파라미터에서 표시 유형을 변경할 수 있으므로 사용자가 인식된 물체를 관찰하는 데 편리합니다. 빨판의 크기에 따라 감지 영역을 표시하면 아래 그림과 같은 효과가 나타납니다.

참고
시각화를 켜면 프로젝트의 전체 실행 속도가 느려집니다.
픽 포인트를 예측하기(임의의 물체) 를 참조해 이 스텝에 대해 자세히 알아보십시오.