픽 포인트를 예측하기(임의의 물체)¶
응용 시나리오¶
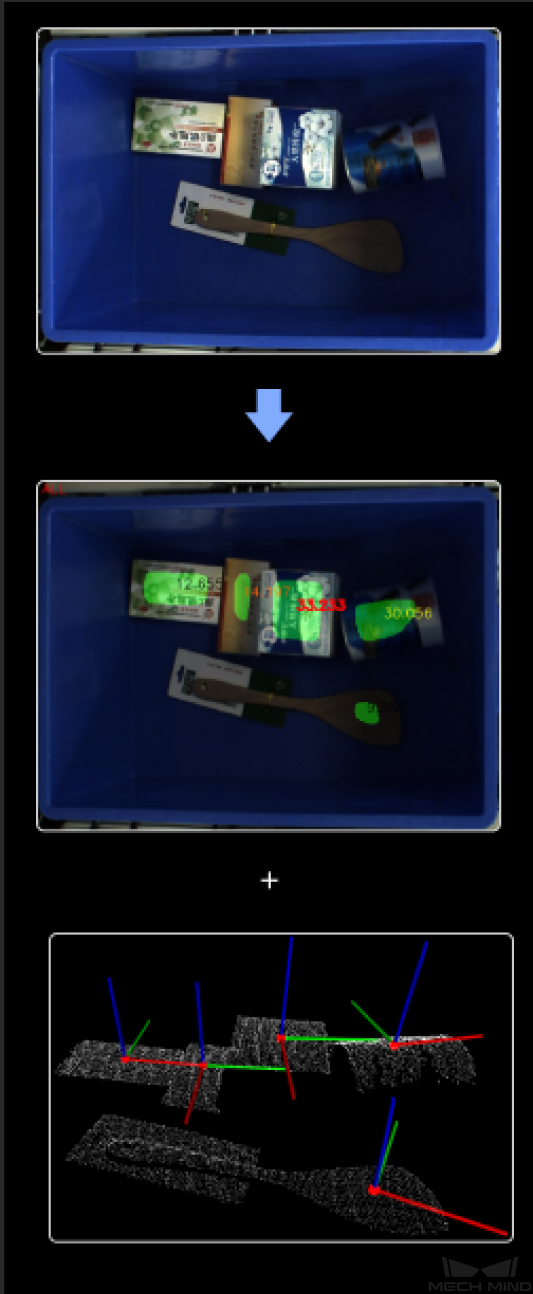
이 스텝은 일반적으로 무질서하게 쌓여있는 다양한 물체들을 분류하는 데 사용됩니다.
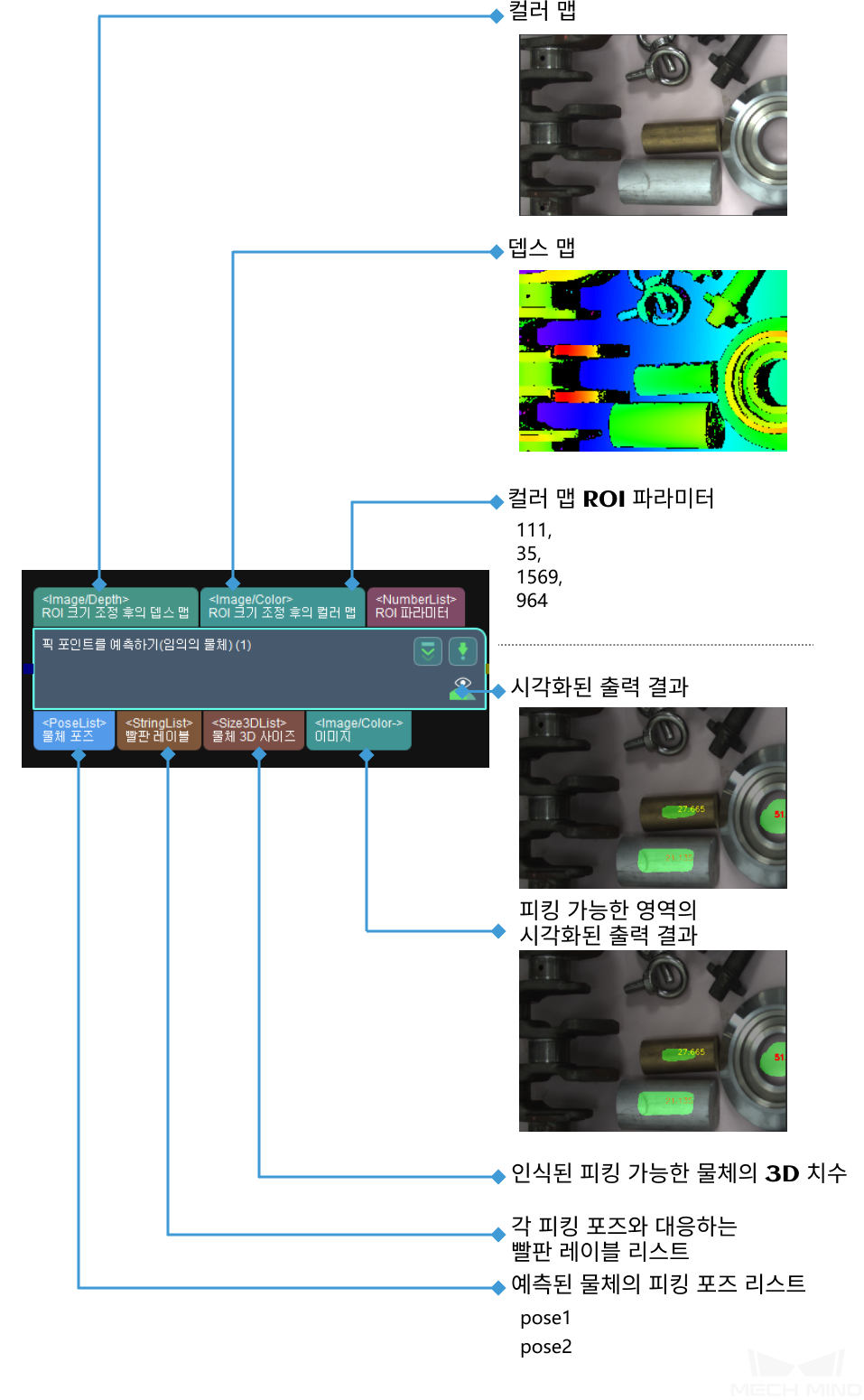
입력 및 출력¶
파라미터 조절 설명¶
서버
- 서버 IP
- 기본값: 127.0.0.1설명: 실제 상황에 따라 딥 러닝 서버의 IP주소를 설정하십시오.
- 서버 포트(1 ~ 65535)
- 기본값:60052설명: 임의의 물체 피킹, 임의의 물체 피킹(빈 없음) 프로젝트에서 60000~65535의 포트 번호를 사용해야 합니다.
작업 거리
- 최소 작업 거리
- 기본값:0설명: 카메라와 시나리오 물체 사이의 가장 짧은 거리(단위: mm)입니다. 상자를 사용하는 경우 이 파라미터를 카메라 맨 밑에서 상자 맨 상단 가장자리까지의 거리로 설정하십시오. 실제 수요에 따라 이 파라미터를 설정해야 합니다.
- 최대 작업 거리
- 기본값: 3000설명: 카메라와 시나리오 물체 사이의 가장 긴 거리(단위: mm)입니다. 상자를 사용하는 경우 이 파라미터를 카메라 맨 밑에서 상자 맨 하단 가장자리까지의 거리로 설정하십시오. 실제 수요에 따라 이 파라미터를 설정해야 합니다.
상자 설정
- 상자를 사용하기
- 기본값: 선택하지 않음설명: 상자가 필요할 때 이 옵션을 선택하세요. 선택한 후 이 스텝에 상자의 포즈를 입력하는 포트가 증가될 것입니다. 아래 그림과 같이 그림1은 선택하기 전이고 그림2는 선택한 후의 효과입니다.

- 상자의 길이
- 기본값: 100mm설명: 상자를 사용하기 를 선택한 후 상자의 사이즈에 근거하여 이 파라미터를 설정해야 합니다.
- 상자의 너비
- 기본값: 100mm설명: 상자를 사용하기 를 선택한 후 상자의 사이즈에 근거하여 이 파라미터를 설정해야 합니다.
윤곽 감지(스마트 배치, 특수 모양)
- 윤곽 감지
- 기본값: 선택하지 않음설명: 물체의 외곽을 감지합니다. 이 옵션을 선택한 후 특수 모양 물체 필터링 파라미터가 나올 것입니다.
특수 모양 물체 필터링 (택배를 피킹하는 시나리오에 많이 사용됨)
- 비교적 좁은 물체를 필터링하기
- 기본값: 선택하지 않음설명: 이 옵션을 선택하면 최소 외접 직사각형의 가장 긴 변의 길이가 설정한 역치보다 큰 물체는 비교적으로 긴 물체로 간주되어 필터링될 것입니다.
- 짧은 변 길이의 하한
- 기본값:0설명: 비교적 좁은 물체를 필터링하기 옵션을 선택해야 이 파라미터를 볼 수 있습니다. 최소 외접 직사각형의 가장 짧은 변의 길이가 설정한 역치보다 작은 물체는 필터링될 것이며 작업 현장의 실제 수요에 따라 설정하십시오.예시: 이 파라미터의 수치를 30으로 설정할 때 실제 길이가 30보다 작은 물체는 필터링될 것입니다. 아래 그림과 같이 위는 필터링 전이고 아래는 필터링 후의 효과입니다.

- 비교적 긴 물체를 필터링하기
- 기본값: 선택하지 않음설명: 이 옵션을 선택하면 최소 외접 직사각형의 가장 긴 변의 길이가 설정한 역치보다 큰 물체는 비교적으로 긴 물체로 간주되어 필터링될 것입니다.
- 긴 변 길이의 상한
- 기본값:0설명: 비교적 긴 물체를 필터링하기 옵션을 선택해야 이 파라미터를 볼 수 있습니다. 최소 외접 직사각형의 가장 긴 변의 길이가 설정한 역치보다 큰 물체는 필터링될 것이며 작업 현장의 실제 수요에 따라 설정하십시오.예시: 이 파라미터의 수치를 180으로 설정할 때 실제 길이가 180보다 큰 물체는 필터링될 것입니다. 아래 그림과 같이 위는 필터링 전이고 아래는 필터링 후의 효과입니다.

겹침 검출
- 겹침 검출
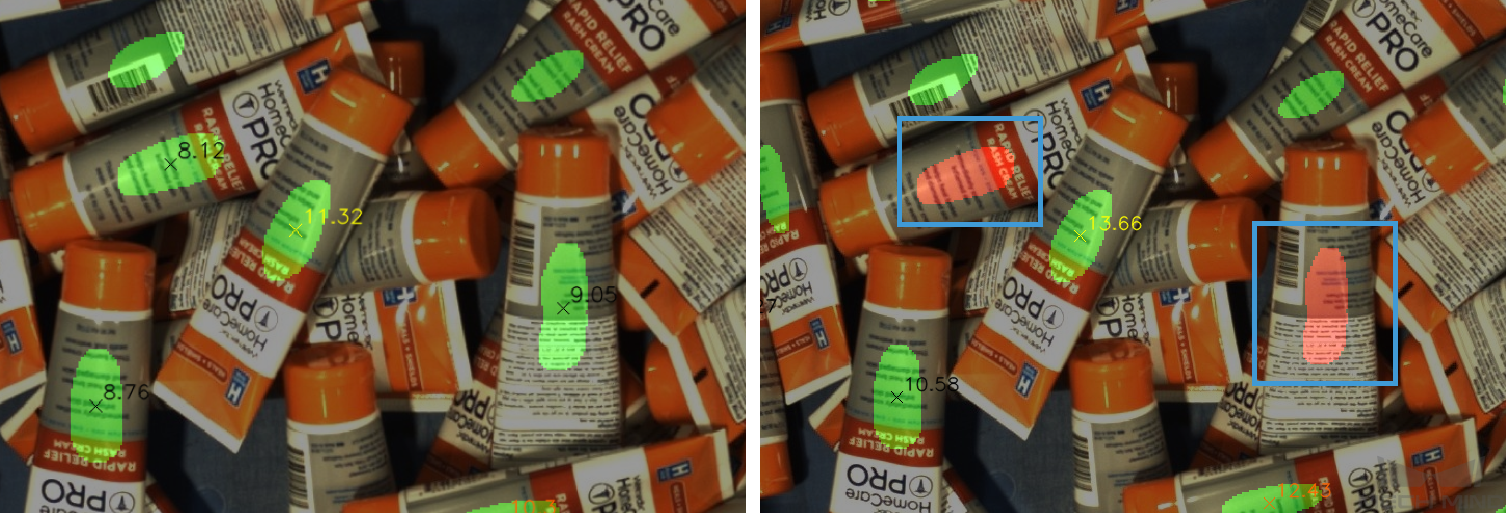
- 기본값: 선택하지 않음설명: 겹친 물체가 존재하면 이 옵션을 선택하십시오. 이 옵션을 선택하면 물체가 겹친 여부를 감지하며 인식된 겹친 물체의 피킹 시의 우선 순위를 낮춥니다.
- 최대 겹친 개수
- 기본값:6설명: 겹침 검출 옵션을 선택해야 이 파라미터를 볼 수 있습니다. 이 파라미터는 겹친 물체의 최대 수량이며 작업 현장의 실제 상황에 따라 설정해야 합니다. 이 파라미터를 비교적으로 큰 수치로 설정하면 "겹친 물체"의 수가 많아져 피킹 태스크가 더 어려워지지만 대상 물체를 쉽게 훼손시키지 않을 것입니다.예시: 이 파라미터의 수치를 6으로 설정할 때 최대 6개의 겹친 물체를 검출할 수 있습니다. 아래 그림과 같이 왼쪽은 겹침 검출 전의 효과이고 오른쪽은 이 파라미터의 수치를 6으로 설정할 때의 검출 결과이며 빨간색 구역을 가진 물체는 검출된 겹친 물체입니다.
빨판 구성
이 파라미터를 조절함으로써 스텝 "픽 포인트를 예측하기" 의 빨판 레이블 출력 결과를 결정합니다.
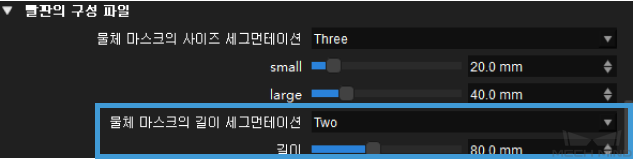
- 마스크 규모에 따라 물체를 나누기
- 기본값: One값 리시트: One, Two, Three.설명: 마스크의 최소 내접원 반경의 차이에 따라 물체들은 서로 다른 그룹으로 나뉘며 각 물체 그룹은 각각의 빨판 구성을 갖습니다.
- 규모 역치 1
- 기본값:0설명: 마스크의 최소 내접원 반경의 첫번째 역치입니다. 반경이 이 수치보가 작은 물체는 그룹1에 나뉘며 이 수치보다 큰 물체는 그룹2에 나뉩니다.설명: 아래 그림과 같이 물체 마스크 내의 내접원 반경이 20mm보다 작으면 빨판 레이블을 Small로 판단합니다.

- 규모 역치 2
- 기본값:0설명: 마스크의 최소 내접원 반경의 두번째 역치입니다. 반경이 이 수치보가 작은 물체는 그룹2에 나뉘며 이 수치보다 큰 물체는 그룹3에 나뉩니다.설명: 아래 그림과 같이 물체 마스크 내의 내접원 반경이 40mm보다 크면 빨판 레이블을 Large로 판단하며 물체 마스크 내의 내접원 반경이 20~40mm범위 내 있으면 빨판 레이블을 Middle로 판단합니다.

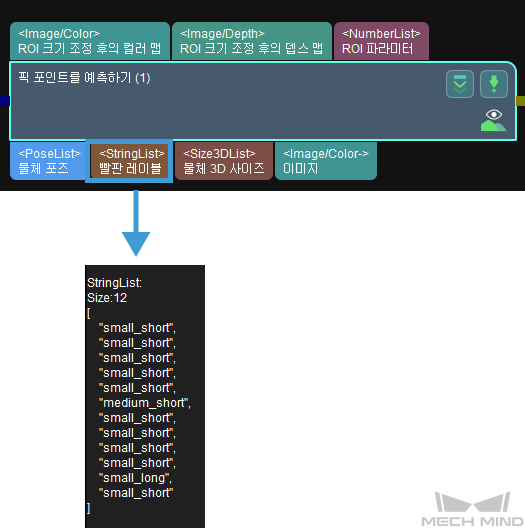
- 마스크 경간에 따라 물체를 나누기
- 기본값: One값 리스트: One, Two.설명: 마스크의 최소 내접원 반경의 차이에 따라 물체들은 서로 다른 그룹으로 나뉘며 각 물체 그룹은 각각의 빨판 구성을 갖습니다.
- 경간 역치
- 기본값: 80설명: 물체 마스크의 최소 외접 직사각형의 대각선 길이가 이 역치보다 작으면 "Short"로 표시되고 역치보다 크면 "Long"으로 표시됩니다.설명: 아래 그림과 같이 물체 마스크의 길이가 80mm보다 크면 빨판 레이블을 긴 것으로 판단하고 작으면 짧은 것으로 판단합니다.
시각화
- 시각화 시작
- 기본값: 선택함.설명: 이 옵션을 선택하면 시각화를 시작할 수 있으며 선택한 시각화 속성 효과를 볼 수 있습니다.
- 시각화 속성
- 기본값: Final Score값 리스트: 최종 점수, 빨판 직경, 물체 길이, 포즈 높이.설명: 시각화할 항목을 선택합니다.예시:
시각화 속성에서 최종 점수를 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

시각화 속성에서 빨판 직경을 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

시각화 속성에서 물체 길이를 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

시각화 속성에서 포즈 높이를 선택하면 시각화 출력 효과가 아래 그림과 같습니다. 그중에 빨간색 글꼴의 물체는 우선으로 피킹하는 대상입니다.

포즈 배열 논리
- 포즈 높이의 가중치
- 기본값: 3값 리스트: 1, 2, 3
- 빨판 사이즈 가중치
- 기본값: 1값 리스트: 0, 1, 2, 3
- 물체 길이의 가중치
- 기본값: 1값 리스트: 0, 1, 2, 3
설명: 포즈의 높이, 빨판의 사이즈, 물체의 길이에 대해 피킹 시의 가중치를 설정한 후 항목의 점수는 항목에 해당 가중치 값을 곱한 값이며 점수의 합은 최종 점수이며 로봇은 최종 점수에 따라 가장 높은 점수를 가진 물체를 피킹합니다.