실용 가이드¶
임의의 물체 피킹 프로젝트의 기본 프로세스는 아래와 같습니다.
전형적인 응용 프로젝트를 새로 만들기¶
메인 인터페이스 상단의 메뉴 바에서 를 클릭하여 다음 인터페이스로 들어가거나, 툴바에서 전형적인 응용 프로젝트를 새로 만들기 를 클릭하여 다음과 같은 화면으로 들어갈 수 있습니다.

임의의 물체 피킹 을 선택하세요.
자체 정의한 프로젝트 명칭을 입력하세요.
 를 클릭하여 프로젝트 파일의 저장 경로(빈 폴더를 만드는 것을 권장함)를 선택하고 프로젝트를 만들기 를 클릭하세요.
를 클릭하여 프로젝트 파일의 저장 경로(빈 폴더를 만드는 것을 권장함)를 선택하고 프로젝트를 만들기 를 클릭하세요.
사전 준비¶
카메라 캘리브레이션¶
카메라 캘리브레이션의 목적은 카메라의 파라미터 파일을 생성하는 것입니다. 로봇과 카메라 사이의 위치 관계를 결정하는 데 사용됩니다.
툴바에서 카메라 캘리브레이션(표준) 을 클릭하여 카메라를 캘리브레이션합니다.

을 클릭하여 카메라 캘리브레이션을 수행할 수도 있습니다.
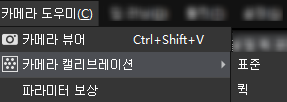
확실하지 않은 경우 카메라 캘리브레이션 표준 모드 를 참조하십시오.
카메라 구성¶
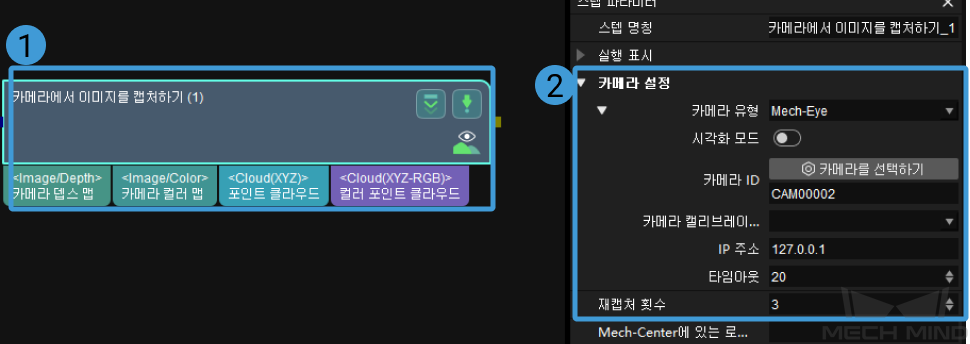
카메라를 사용하여 이미지를 캡처하기 전에 카메라에서 이미지를 캡처하기 스텝을 선택해야 하며 실제 상황에 따라 구성 ID, 파라미터 그룹, IP 주소 등을 올바르게 구성해야 합니다. 카메라에서 이미지를 캡처하기 내용을 참조하십시오.
실행 및 디버그¶
힌트
프로젝트를 실행할 때 60000~65535의 딥 러닝 서버 포트를 사용해야 합니다.
프로젝트 실행 및 디버그 를 통해 프로젝트 실행 및 디버깅 방법에 대해 알아보세요.
프로젝트 상세 설명 을 통해 프로젝트의 알고리즘 프로세스 및 파라미터 설정과 관련된 내용에 대해 알아보세요.
프로젝트 디버깅이 완료되어 성공적으로 실행된 후, 사용자가 현장 데이터를 수집하여 후속 문제를 쉽게 피드백하거나, 프로젝트 중 어느 한 단계의 수행 효과가 좋지 않은 것을 발견하여 현장 환경이 아닌 곳에서 스텝이나 파라미터를 더 좋게 조정하고 싶을 때 데이터 저장 및 데이터 재생 도구를 사용하면 이러한 목적을 달성할 수 있습니다.
데이터 재생 도구를 사용하는 전제:
프로젝트 파일 (프로젝트가 완전하게 실행되며 오류가 없음).
프로젝트 실행 중에 수집된 풀타임 라이브 데이터 소스는 2D 컬러 맵, 뎁스 맵, 카메라 파라미터 파일을 포함하며 저장 방법은 데이터 저장 을 참고할 수 있습니다.