3D 근사 매칭 V2¶
기능 설명
포인트 클라우드 템플릿을 사용하여 처음으로 원래 포인트 클라우드와 매칭시키고 시나리오에서 대상 물체의 초기 후보 포즈를 출력합니다.
응용 시나리오
일반적으로 처음으로 시나리오 포인트 클라우드에서 대상 물체를 찾고 초기 포즈를 얻는 데 사용됩니다. 이 스텝은 일반적으로 3D 상세 매칭 과 함께 사용됩니다.
입력 및 출력
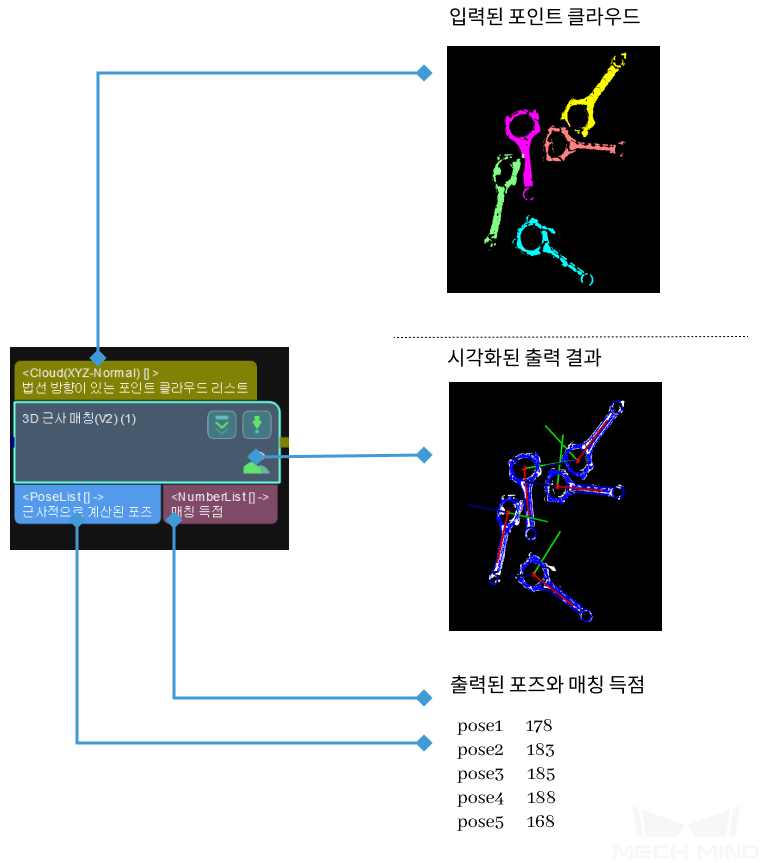
파라미터 설명
파라미터 디버깅 레벨
Basic 파라미터 디버깅 레벨
모델 설정
- 모델 선택
조정 설명: 오른쪽의 드롭다운 버튼을 클릭하여 모델 파일과 해당 기하학적 중심 파일을 빠르게 선택하고 전환합니다. 모델 선택은 템플릿 라이브러리(프로젝트 폴더 아래 resource3d_matching)에 있는 모델 파일과 해당 기하학적 중심 파일만 선택할 수 있습니다.자세한 내용은 매칭 모델 및 픽 포인트 편집기 를 참조하십시오.

- 모델 파일
조정 설명: |icon_file|을 마우스 왼쪽 버튼으로 클릭한 후 ply 형식의 템플릿 포인트 클라우드 파일을 선택합니다.
모델 파일의 구성 과정은 포인트 클라우드 템플릿 생성과 관련이 있으며, 자세한 사항은 포인트 클라우드 모델 생성 를 참고하시기 바랍니다.
- 기하학적 중심 파일
조정 설명: |icon_file|을 마우스 왼쪽 버튼으로 클릭한 후 json 형식의 기하학적 중심 파일을 선택합니다.
기하학적 중심 파일의 구성 과정은 픽 포인트 추가와 관련이 있으며 자세한 내용은 픽 포인트 추가 를 참조하십시오.
- 매칭 모드
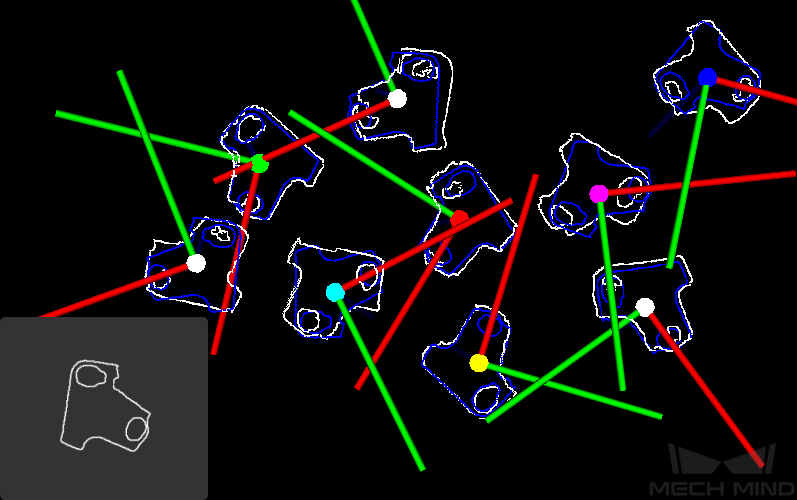 사용된 템플릿 포인트 클라우드가 물체의 면인 경우 다음 그림과 같이 면 매칭을 선택합니다.
사용된 템플릿 포인트 클라우드가 물체의 면인 경우 다음 그림과 같이 면 매칭을 선택합니다.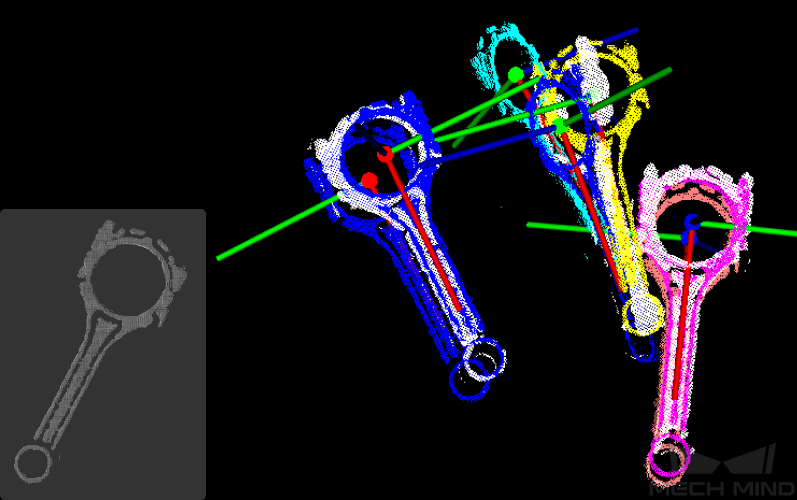
전처리 설정
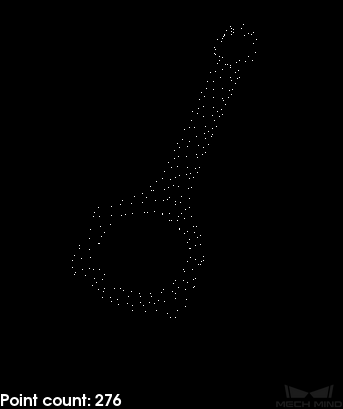
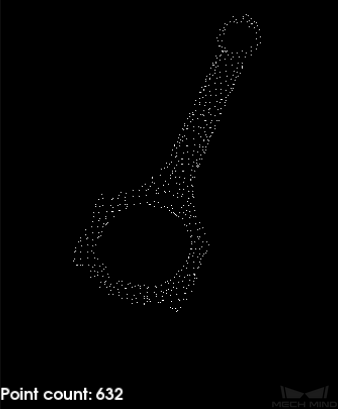
- 샘플링 후 모델의 예상 포인트 수
파라미터 값
300
600
이미지
포인트 수
276
632
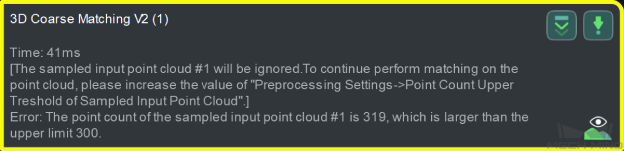
- 샘플링 후 입력 포인트 클라우드 포인트의 상한 역치
포즈 검증 설정
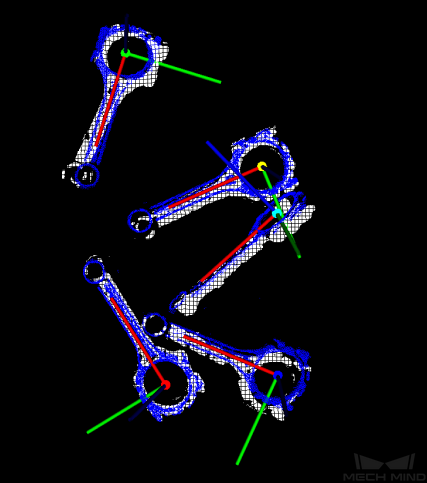
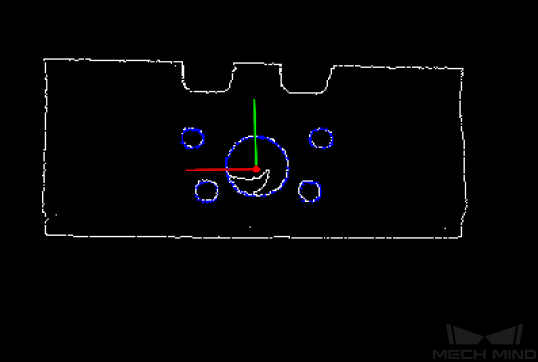
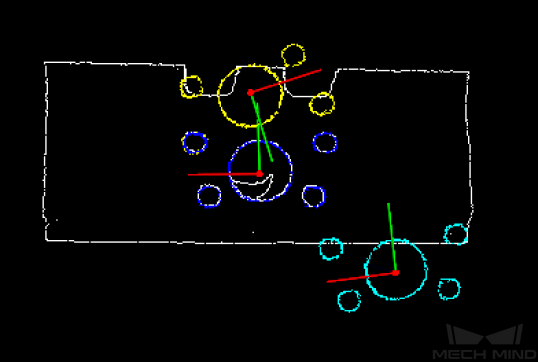
- 단일 입력 포인트 클라우드 결과의 예상 수
파라미터 값 |
1 |
3 |
출력 이미지 |
|
|
Advanced 파라미터 디버깅 레벨
투표 설정
- 단일 특징에 최대 점쌍이 포함
- 거리 양자화
- 각도 양자화
- 투표 비율 하한 역치
- 기준점 샘플링 스텝 간격 포인트 수
- 비교점 샘플링 스텝 간격 포인트 수
포즈 필터 설정
- 포즈 거리 기반 비최대 억제 사용
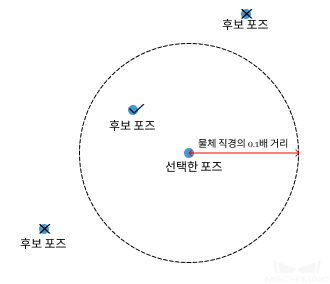
- 지정된 축 각도를 기반으로 후보 포즈 필터링
포즈 검증 설정
포인트 클라우드가 위치한 공간은 3D 그리드로 나뉘며, 복셀 길이 는 3D 그리드의 가장 작은 단위의 크기입니다.
- 복셀 길이 생성 전략
- 복셀 길이
- 복셀 길이 하한
- 복셀 길이 상한
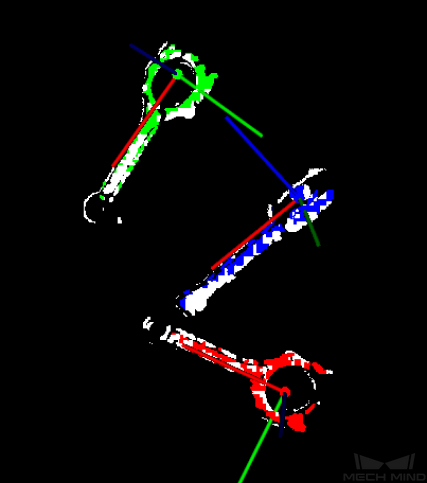
결과 시각화
시각화 옵션 |
이미지 |
샘플링 후 템플릿 |
|
샘플링 후 시나리오 |
|
매칭 결과 |
|
포즈 검증 중 포인트 사용 상황 |
|