3D 근사 매칭¶
기능 설명¶
포인트 클라우드 모델과 원시 포인트 클라우드를 근사 매칭하여 대상 물체의 초기 후보 포즈를 출력합니다.
(포인트 클라우드 모델을 새로 만드는 방법은 포인트 클라우드 모델 생성 을 참고하세요.)
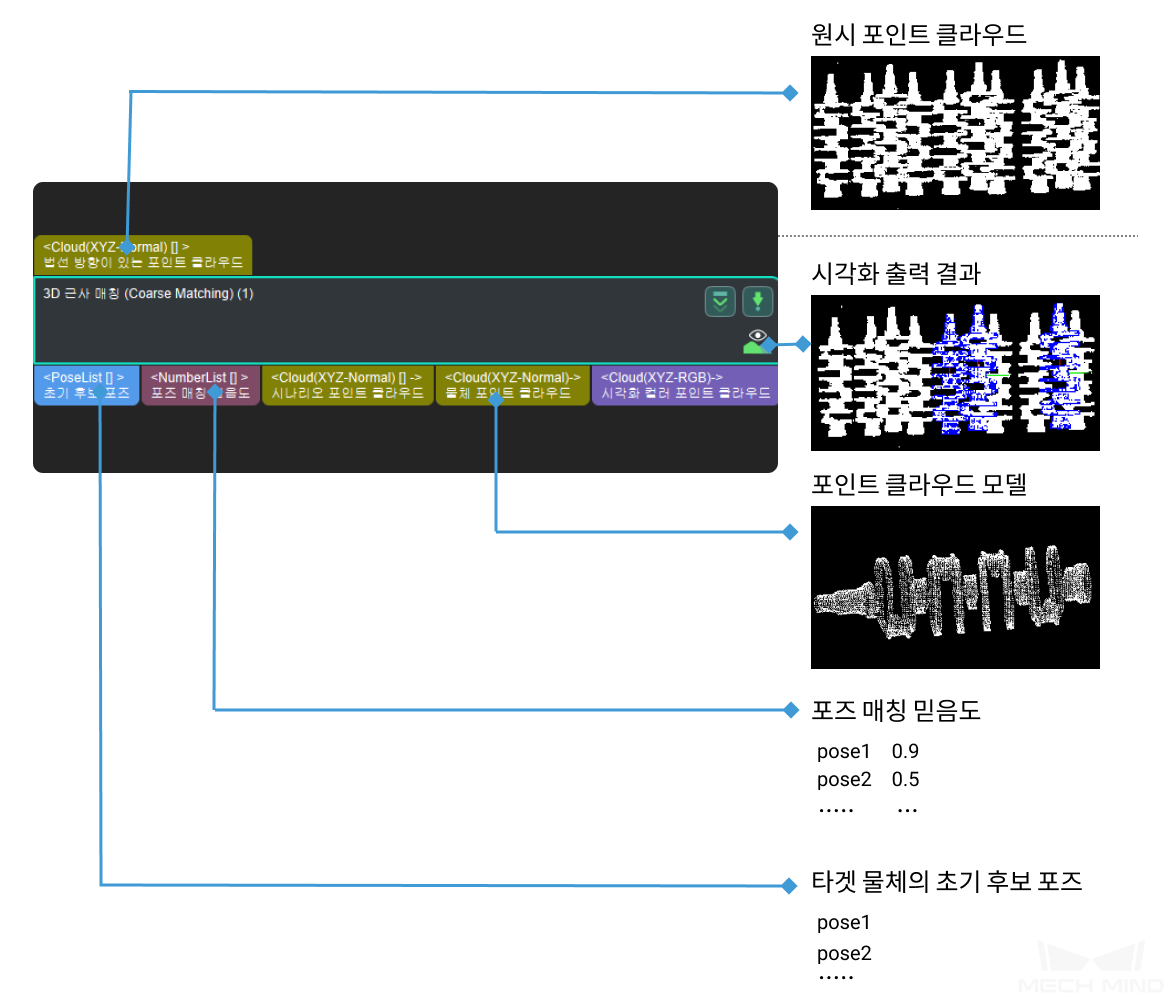
입력 및 출력¶
파라미터 설명¶
파라미터 |
파라미터 설명 |
|||
모델 설정 |
모델 선택 |
모델 라이브러리에 있는 모델을 선택합니다. |
||
모델 파일 |
모델 파일과 기하학적 중심점 파일을 선택하기 |
|||
기하학적 중심점 파일 |
||||
포인트 클라우드 중 포인트의 방향 계산 |
포인트가 위치한 평면의 법선 방향 계산 모드 |
포인트 클라우드에서 포인트가 위치한 평면의 법선 벡터를 계산하는 방법(네 가지 방법 선택 가능) |
||
검색할 포인트의 수 |
포인트의 방향을 계산하는 데에 사용되는 포인트 수입니다. |
|||
알고리즘 유형 |
SurfaceMatching EasyMode |
속도 조정 파라미터 |
메인 속도 컨트롤러 |
알고리즘 처리 속도를 조정합니다. |
보조 속도 컨트롤러 |
알고리즘 처리 속도를 조정합니다. [메인 속도 컨트롤러]의 영향보다 작습니다. |
|||
출력 설정 |
각 포인트 클라우드에서 감지된 최대 포즈 수 |
각 포인트 클라우드 매칭에 대한 예상 출력 수 |
||
결과 시각화 |
샘플링된 포인트 클라우드 모델 표시 |
샘플링된 포인트 클라우드 모델 표시 |
||
샘플링된 시나리오 포인트 클라우드 표시 |
샘플링된 시나리오 포인트 클라우드 표시 |
|||
매칭 결과 표시 |
매칭된 후의 모델과 시나리오 포인트 클라우드를 표시합니다. |
|||
SurfaceMatching |
샘플링 설정 |
자동 다운샘플링 |
자동 다운샘플링 기능을 사용할지를 선택합니다. |
|
샘플링 후 모델의 목표 포인트 수 |
샘플링된 포인트 클라우드의 포인트 수를 조절하는 데 사용됩니다. |
|||
샘플링된 모델의 최대 포인트 수 |
포인트 클라우드 모델이 다운 샘플링된 후 포인트 클라우드에 있는 포인트 수의 상한을 설정합니다. |
|||
샘플링된 시나리오 모델의 최대 포인트 수 |
시나리오 포인트 클라우드가 다운 샘플링된 후 포인트 클라우드에 있는 포인트 수의 상한을 설정합니다. |
|||
샘플링 간격 |
샘플링된 포인트 클라우드의 포인트 사이의 최대 거리를 조절하는 데 사용됩니다. |
|||
최소 샘플링 간격 |
샘플링 간격을 계산하는 데 사용됩니다. |
|||
투표 설정 |
거리 양자화 |
포인트 사이의 거리를 양자화하는 데 사용됩니다. |
||
각도 양자화 |
점쌍의 법선 사이의 각도를 양자화하는 데 사용됩니다. |
|||
최대 투표 비율 |
최대 투표수에 대한 투표수의 비율 역치를 설정하는 데 사용됩니다. |
|||
기준점 샘플링 간격 |
기준점의 샘플링 간격을 조정하는 데 사용됩니다. |
|||
비교점 샘플링 간격 |
비교점 샘플링 간격을 조정하는 데 사용됩니다. |
|||
클러스터링 설정 |
클러스터링 비율 |
계산된 모든 포즈에 대한 클러스터링에 사용되는 포즈 수의 비율을 조정하는 데 사용됩니다. |
||
각도 차이 역치 |
클러스터링 과정에서 각도의 증분을 조정하는 데 사용됩니다. |
|||
거리 차이 역치 |
클러스터링 과정에서 거리의 증분을 조정하는 데 사용됩니다. |
|||
높은 점수를 가진 상위 N개의 클러스터 결과를 출력하기 |
이 파라미터는 클러스터링를 통해 얻은 여러 매칭 결과를 조절하여 그중에 득점이 가장 높은 상위 N개의 결과를 최종 결과로 출력하는 데 사용됩니다. |
|||
포즈 검증 설정 |
포즈 검증 기능을 사용하기 |
포즈 검증 기능을 사용할지를 선택합니다. |
||
인접 포인트 검색 반경 |
포즈 검증 과정에서 검증될 구역의 크기를 조절합니다. |
|||
복셀 길이 |
3D 메쉬 가장 작은 요소의 크기입니다. |
|||
각 포인트 클라우드에서 감지된 최대 포즈 수 |
이 파라미터의 역할은 SurfaceMatchingEasyMode를 사용할 때와 같습니다. |
|||
결과 시각화 |
샘플링된 포인트 클라우드 모델 표시 |
샘플링된 포인트 클라우드 모델 표시 |
||
샘플링된 시나리오 포인트 클라우드 표시 |
샘플링된 시나리오 포인트 클라우드 표시 |
|||
매칭 결과 표시 |
매칭된 후의 모델과 시나리오 포인트 클라우드를 표시합니다. |
|||
응용 예시¶
파라미터 조절 설명¶
모델 설정
- 모델 선택
- 설명: 오른쪽에 있는 드롭다운 버튼을 클릭하여 모델 파일과 해당 기하학적 중심점 파일을 빠르게 선택 및 전환할 수 있습니다.

- 모델 파일
- 설명:
 버튼을 마우스 왼쪽 키로 클릭한 후 .ply형식의 포인트 클라우드 모델 파일을 선택합니다. 모델 파일의 구성 과정은 포인트 클라우드 모델을 생성하는 것과 관련되며 구체적인 사항은 매칭 모델 및 픽 포인트 편집기 내용을 참조하십시오.
버튼을 마우스 왼쪽 키로 클릭한 후 .ply형식의 포인트 클라우드 모델 파일을 선택합니다. 모델 파일의 구성 과정은 포인트 클라우드 모델을 생성하는 것과 관련되며 구체적인 사항은 매칭 모델 및 픽 포인트 편집기 내용을 참조하십시오. - 기하학적 중심점 파일
- 설명: 버튼을 마우스 왼쪽 키로 클릭한 후 .json 형식의 기하학적 중심점 파일을 선택합니다. 기하학적 중심점 파일의 구성 과정은 픽 포인트를 추가하는 것과 관련되며 구체적인 사항은 매칭 모델 및 픽 포인트 편집기 내용을 참조하십시오.
포인트 클라우드 중 포인트의 방향 계산
- 포인트가 위치한 평면의 법선 방향 계산 모드
- 기본값: Origin
값 리스트
조절 설명
Origin
입력된 포인트 클라우드의 원시 법선을 직접 사용합니다.
StandardMode
CPU를 통해 입력된 포인트 클라우드의 법선 방향을 다시 계산하여 모델에 법선 방향이 없을 때 사용하는 것을 권장합니다. 목표점 근처에서 목표점에서 가장 가까운 k개의 포인트를 검색하여 PCA(주성분 분석법)를 이용하여 최소 특징 벡터를 획득하는 것을 그 포인트의 법선 방향으로 합니다.
EdgeTangent
입력된 에지 포인트 클라우드의 접선을 계산하고, 이 점의 접선 방향을 법선 방향으로 이용합니다.외부 윤곽이 서로 경상인 다른 물체를 구분할 수 있으며 평면 물체의 에지 포인트 클라우드와 매칭할 때 사용하는 것을 추천합니다.
EdgeNormal
입력된 에지 포인트 클라우드의 법선 벡터를 계산하고, 이 점의 접선 방향을 법선 방향으로 이용합니다. 평면 물체의 에지 포인트 클라우드와 매칭할 때 사용하는 것을 추천합니다.
- 검색할 포인트의 수
- 기본값: 10설명: 이 파라미터는 포인트 방향를 계산하는 인접 포인트의 개수를 조정하는데 사용됩니다. 즉 StandardMode 모드 하의 k의 값입니다.
알고리즘 유형
기본값: SurfaceMatchingEasyMode값 리스트: SurfaceMatchingEasyMode ,SurfaceMatching설명: 이 알고리즘은 두 가지 유형이 있으며 두 가지 알고리즘을 사용할 때 "결과 시각화" 파라미터를 다 조절할 수 있습니다. 알고리즘 유형의 파라미터 조정은 아래 그림과 같습니다. 다음으로 먼저 SurfaceMatchingEasyMode 모드에서 조절할 수 있는 파라미터를 소개하고자 합니다.SurfaceMatchingEasyMode 알고리즘: 조절 가능한 파라미터 모델은 속도 조절 파라미터와 출력 설정입니다.SurfaceMatching 알고리즘: 조절 가능한 파라미터 모델은 샘플링 설정, 투표 설정, 클러스터링 설정, 포즈 검증 설정으로 이루어집니다.
SurfaceMatchingEasyMode 파라미터 설명
속도 조절 파라미터
- 메인 속도 컨트롤러
- 기본값: 2설명: 이 파라미터는 알고리즘 처리 속도를 조절하는 데 사용됩니다. 값이 커지면 알고리즘 처리 속도는 빨라지지만 매칭 정확도는 떨어집니다. 그 영향 효과는 보조 속도 컨트롤러 보다 큽니다. 이 파라미터의 유효 범위는 1-6입니다.예시: 아래 그림과 같이 왼쪽 그림은 이 파라미터가 기본값
2일 때의 결과이고, 오른쪽 그림은 ``6``으로 조정된 후의 결과입니다. 파라미터 값을 높인 후 매칭 정밀도가 낮아진 것을 볼 수 있습니다.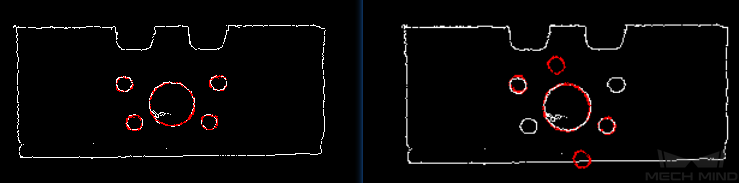
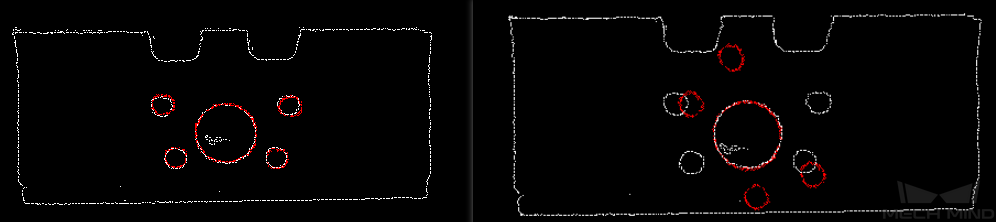
- 보조 속도 컨트롤러
- 기본값: 10설명:이 파라미터는 알고리즘 처리 속도를 조절하는 데 사용됩니다. 값이 커지면 알고리즘 처리 속도는 빨라지지만 매칭 정확도는 떨어집니다. 그 영향 효과는 메인 속도 컨트롤러 보다 약합니다. 이 파라미터의 유효범위는 1-20입니다.예시: 아래 그림과 같이 왼쪽 그림은 이 파라미터가 기본값
10일 때의 결과이고, 오른쪽 그림은 ``18``으로 조정된 후의 결과입니다. 파라미터 값을 높인 후 매칭 정밀도는 낮아지지만 영향은 메인 속도 컨트롤러만큼 크지 않다는 것을 볼 수 있습니다.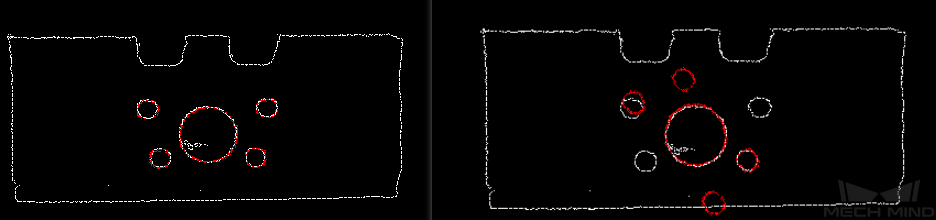
출력 설정
- 각 포인트 클라우드에서 감지된 최대 포즈 수
- 기본값: 3설명: 이 파라미터는 각 포인트 클라우드 매칭 출력 결과 개수의 목표값입니다. 값이 클수록 매칭하는 출력 결과가 더 많습니다. 이 파라미터의 유효범위는 1-∞입니다.예시: 아래 그림과 같이 왼쪽 그림은 이 파라미터가
1로 조정된 결과이고, 오른쪽 그림은 이 파라미터가 기본값 ``3``일 때의 결과입니다.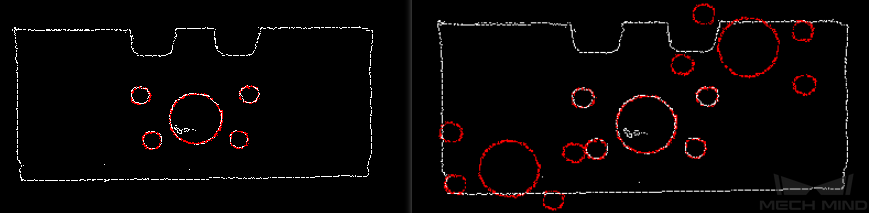
SurfaceMatching 파라미터 설명
샘플링 설정
- 자동 다운샘플링
- 기본값: True값 리스트: True,Flase설명: 이 파라미터는 자동 다운 샘플링 사용 여부를 결정하는데 사용되며, 만약 ``True``로 설정하면 샘플링 후 모델의 희망 포인트 수에 따라 모델 포인트 클라우드 다운 샘플링 간격 파라미터가 자동으로 조정됩니다.
- 샘플링 후 모델의 목표 포인트 수
- 기본값: 1000설명: 이 파라미터는 샘플링 포인트 클라우드의 포인트 수를 조절하는데 사용됩니다. 샘플링 값이 True일 때 유효합니다 . 포인트 클라우드의 포인트 수는 이 값에 가깝습니다.이 값이 작을수록 샘플링 포인트 클라우드의 포인트 수가 줄어들어 포즈의 정확도가 떨어집니다.
- 샘플링된 모델의 최대 포인트 수
- 기본값: 4000설명: 이 파라미터는 모델 포인트 클라우드의 샘플링 이후의 포인트 클라우드의 최대 수를 설정하는데 사용합니다. 즉 샘플링 후의 모델 포인트 클라우드의 포인트 수를 위해 상한선을 설정합니다.매칭 효과가 이상적이지 않으면 이 파라미터를 증가시키는 것이 좋습니다. 매칭 속도에 대해 요구가 높으면 이 파라미터를 줄이는 것이 좋습니다.
- 샘플링된 시나리오 모델의 최대 포인트 수
- 기본값: 3000설명: 이 파라미터는 시나리오 포인트 클라우드 다운 샘플링 후의 포인트 클라우드의 최대 값을 설정하는데 사용합니다. 즉 샘플링 후의 시나리오 클라우드의 포인트 수를 위해 상한선을 설정합니다.이 파라미터의 값은 실제 샘플링 포인트 수보다 작을 수 없습니다. 일반적으로 조정할 필요가 없습니다. 만약 최대 실행 시간에 제한이 있으면 이 파라미터를 줄이는 것이 좋습니다.
- 샘플링 간격
- 기본값: 0.01설명: 이 파라미터는 샘플링 포인트 클라우드의 포인트 사이의 최대 거리를 조절하기 위해 사용되며 단위는 m입니다.모델 포인트 클라우드 다운 샘플링 간격이 최소 샘플링 간격보다 작을 때 최소 샘플링 간격을 실제 샘플링 간격으로 사용합니다.이 값이 클수록 샘플링 후 계산에 사용되는 포인트 클라우드의 수가 적고 매칭 정확도가 낮을수록 알고리즘 실행 시간이 줄어듭니다.
- 최소 샘플링 간격
- 기본값: 0.003설명: 이 파라미터는 샘플링 간격을 계산하는 데 사용되며 단위는 m입니다. 자동 샘플링 값이 True일 때 유효합니다 .계산된 샘플링 간격이 이 값보다 작을 때 이 값은 실제 샘플링 간격이 됩니다.
투표 설정
- 거리 양자화
- 기본값: 1설명: 이 파라미터는 포인트 간 거리를 양자화하는 데 사용됩니다. \(거리 간격 = 거리 양자화 × 샘플링 간격\) 이므로 이 파라미터가 커지면 매칭 정밀도가 떨어집니다.
- 각도 양자화
- 기본값: 60설명: 이 파라미터는 포인트 간 벡터 간 클램프의 파라미터를 양자화하기 위해 사용됩니다.단위는 ° 입니다. \(각도 간격 = 2 × 3.14 / 각도 양자화\) 이므로 파라미터가 커지면 매칭 정밀도가 높아집니다.
- 최대 투표 비율
- 기본값: 0.8설명: 이 파라미터는 투표수가 최대 투표수에 차지하는 비율의 역치를 설정하는 데 사용됩니다.앞 단계에서는 각 포즈마다 해당하는 표를 받습니다. 이 파라미터에 이 최대 표 수를 곱하여 역치를 얻습니다. 이 역치보다 많은 표를 얻어야 해당 포즈만 남아서 클러스터링 작업을 합니다. 이 값이 작을수록 정확한 매칭 결과를 찾을 가능성이 높지만 실행 시간은 그만큼 늘어납니다.이 파라미터의 유효범위는 0-1입니다.
- 기준점 샘플링 간격
- 기본값: 5설명: 이 파라미터는 참고 포인트의 샘플링 스텝 길이를 조정하기 위해 사용됩니다.포인트 클라우드에서 이 스텝 길이를 한 간격으로 샘플링합니다.이 값이 클수록 간격 샘플링 포인트가 줄어들고 실행 속도가 빨라지지만 매칭 정밀도는 감소합니다.
- 비교점 샘플링 간격
- 기본값: 1설명: 이 파라미터는 피참고 포인트의 샘플링 스텝 길이를 조정하기 위해 사용됩니다.포인트 클라우드에서 이 스텝 길이를 한 간격으로 샘플링합니다.이 값이 클수록 간격 샘플링 포인트가 줄어들고 실행 속도가 빨라지지만 매칭 정밀도는 감소합니다.기준점과 비교점은 점쌍을 이루고 샘플링 간격이 크면 클수록 기준점과 비교점의 수가 줄어들고 형성한 점쌍도 적어지며 실행 속도가 빨라집니다.참고 포인트 는 매칭 모델 위의 매칭 포인트입니다. 피참고 포인트 는 매칭 모델 위에 있지 않은 매칭 포인트입니다.
클러스터링 설정
- 클러스터링 비율
- 기본값: 0.1설명: 이 파라미터는 전체 계산된 포즈 수에서 클러스터링을 위한 포즈 수가 차지하는 비율의 크기를 조절하기 위해 사용됩니다.모든 포즈는 계산 과정에서 할당됩니다. 모든 포즈는 크기에 따라 정렬됩니다. 이 파라미터는 얼마나 큰 비율의 포즈를 클러스터링에 사용할지 결정합니다. 기본값은 ``0.1``이며, 상위 10%의 위치는 클러스터링의 포즈가 됩니다.이 값이 클수록 정확한 매칭 결과를 찾을 가능성이 높지만 작동 시간은 그만큼 늘어납니다.
- 각도 차이 역치
- 기본값: 15설명: 이 파라미터는 클러스터링 과정에서의 각도 증량의 크기를 조정하기 위해 사용됩니다.최종 계산 결과에서, 같은 물체의 여러 개의 포즈가 계산될 수 있으며, 파라미터와 매우 가까운 포즈가 융합될 때, 이 파라미터는 각도라는 파라미터의 증량을 결정합니다.이 파라미터가 클수록 각도 차이가 큰 포즈도 최종 결과에 융합되어 매칭 정밀도가 떨어집니다.
- 거리 차이 역치
- 기본값: 0.02설명: 이 파라미터는 클러스터링 과정에서 거리 증량의 크기를 조정하는데 사용됩니다.최종 계산 결과에서, 같은 물체의 여러 개의 포즈가 계산될 수 있습니다. 파라미터와 매우 가까운 포즈가 조합될 때, 이 파라미터는 이 파라미터로부터의 증량을 결정합니다. 이 파라미터가 커질수록 거리 차이가 큰 포즈가 최종 결과에 융합되어 매칭 정밀도가 떨어집니다.
- 높은 점수를 가진 앞에서 N개의 클러스터 결과를 출력하기
- 기본값: 5설명: 이 파라미터는 클러스터링를 조정하여 얻은 여러 매칭 결과 중 가장 높은 점수를 얻은 앞의 N개의 결과를 최종 결과물로 출력하기 위해 사용됩니다.
포즈 검증 설정
- 포즈 검증 기능을 사용하기
- 기본값: True값 리스트: True,Flase설명: 이 파라미터는 포즈 검증 사용 여부를 결정합니다.이 파라미터를 ``True``로 설정 했을 때, 클러스터링 모든 파라미터는 유효하지 않습니다.포즈 검증과 클러스터링은 서로 다른 최종 매칭 결과의 검증과 선별의 방법으로 동시에 사용할 수 없습니다.
- 인접 포인트 검색 반경
- 기본값: 1설명: 이 파라미터는 포즈 검증 과정에서 검증 영역의 크기를 제어하기 위해 사용되며, 단일 복셀 ( voxel )은 한 단위입니다.값이 커지면 포즈 검증을 위한 표시 영역이 커지며, 이에 따라 최종 결과를 검증하기 위한 포인트가 많아지고, 매칭 정밀도가 떨어집니다.
- 복셀 길이
- 기본값: 3설명: 포인트 클라우드가 있는 공간을 3D 메쉬로 분할합니다. 이 파라미터는 3D 메쉬 가장 작은 요소의 크기이며 단위는 mm입니다. 값이 커지면, 선택된 범위는 넓어지며, 포즈 검증을 참여하는 포인트가 많아지고, 알고리즘의 처리 속도는 빨라지지만, 매칭 정밀도는 떨어집니다.
- 각 포인트 클라우드에서 감지된 최대 포즈 수
- 기본값: 3설명: SurfaceMatching 알고리즘 아래에서 이 파라미터 효과는 SurfaceMatchingEasyMode 와 같습니다.예시: 아래와 같이 왼쪽 그림은 이 파라미터가
1로 조정된 결과이고, 오른쪽 그림은 이 파라미터가 기본값 ``3``일 때의 결과입니다.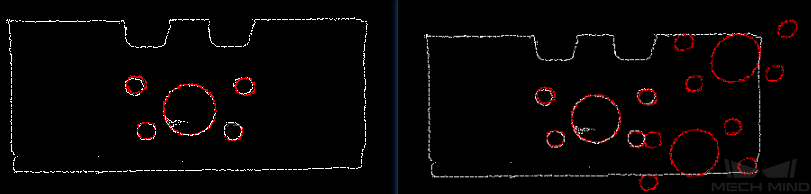
결과 시각화
- 샘플링된 포인트 클라우드 모델 표시
- 기본값: False값 리스트: True,Flase설명: 이 파라미터는 샘플링의 모델 포인트 클라우드를 표시하는데 사용합니다.
- 샘플링된 시나리오 포인트 클라우드 표시
- 기본값: False값 리스트: True,Flase설명: 이 파라미터는 샘플링의 시나리오 포인트 클라우드를 표시하는데 사용합니다.
- 매칭 결과 표시
- 기본값: True값 리스트: True,Flase설명: 이 파라미터는 매칭 후의 모델 및 시나리오 포인트 클라우드를 표시하는데 사용합니다.