포인트 클라우드 모델 생성¶
포인트 클라우드 모델은 전체 대상 물체 또는 대상 물체의 일부(예: 가장 높은 층 물체 표면 포인트 클라우드, 에지 포인트 클라우드 등)를 설명할 수 있습니다. 좋은 포인트 클라우드 모델은 최소한 다음 3가지 요구 사항을 충족합니다.
포인트 클라우드는 고품질이며 노이즈가 적거나 없습니다.
포인트 클라우드가 고르게 분포되어 있고 그 수가 적당합니다.
포인트 클라우드는 대상 물체의 특성을 강조할 수 있습니다.
매칭 모델 및 픽 포인트 편집기에서 두 가지 방법을 통해 포인트 클라우드를 생성할 수 있습니다.
카메라로 캡처한 이미지를 통해 포인트 클라우드 모델 생성¶
이 기능은 카메라를 통해 대상 물체 또는 배경의 뎁스 맵을 캡처함으로써 포인트 클라우드의 모델을 생성합니다.
힌트
열려 있는 프로젝트에 카메라에서 이미지를 캡처하기 스텝이 반드시 있어야 하고 카메라와 관련된 파라미터를 설정해야 이 기능을 사용할 수 있습니다.
실제 카메라 및 가상 카메라를 사용할 때 구체적인 처리가 다릅니다.다음으로 상세한 처리 방법에 대해 소개해 드리겠습니다.
실제 카메라¶
실제 카메라로 이미지를 캡처해서 포인트 클라우드 모델을 생성하는 경우 대상 물체와 배경을 분리하여 각각 캡처하기 쉬운지에 따라 구체적인 처리 프로세스가 다릅니다. 다음으로 상세한 처리 방법에 대해 소개해 드리겠습니다.
대상 물체가 상대적으로 가벼운 상황(예: 소형 평면 부품을 피킹할 때)에서 대상 물체와 배경을 서로 분리하여 캡처할 수 있습니다.
티칭 픽 포인트를 추가하지 않으면 한 대상 물체를 카메라 시야 내(상자안에) 놓아두고 티칭 픽 포인트를 추가한 경우 대상 물체의 위치가 변했는지 확인해야 합니다. 변했으면 다시 티칭 픽 포인트를 추가해야 합니다.

툴바에 있는
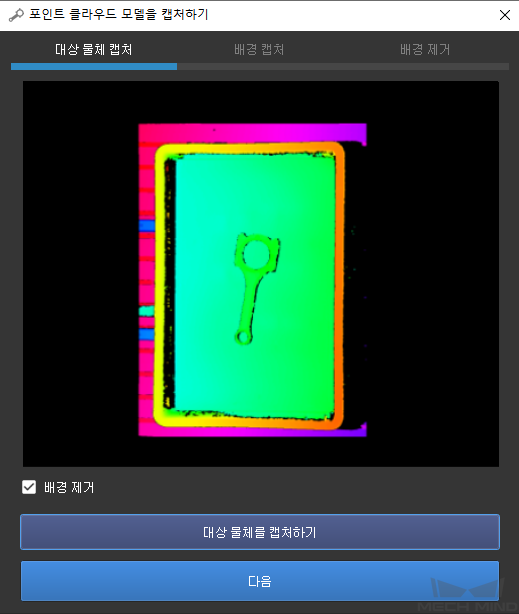
 를 클릭하여 이미지 캡처 창을 열어 배경 제거를 선택하십시오.
를 클릭하여 이미지 캡처 창을 열어 배경 제거를 선택하십시오.
대상 물체를 캡처하기 를 클릭하여 대상 물체의 뎁스 맵을 캡처하고 나서 다음 을 클릭하십시오.
카메라 시야 내의 대상 물체를 모두 제거하고 배경만 남겨두십시오. 피킹 용기안에서 물체를 피킹해야 하면 용기 안에 있는 물체를 모두 제거해야 하고 피킹 용기를 남겨야 합니다.

배경을 캡처하기 를 클릭하여 배경의 뎁스 맵을 캡처하고 나서 다음 을 클릭하십시오.

배경 제거 를 클릭하여 대상 물체의 포인트 클라우드 모델을 표시할 수 있습니다.

포인트 수 역치 를 조절하십시오.
이 역치를 통해 배경을 제거한 후의 뎁스 맵에 대해 노이즈를 제거합니다. 이 값이 높을 수록 더 많은 노이즈를 제거할 수 있습니다.
대상 물체의 포인트 클라우드가 완전하지 않으면 이 파라미터의 수치를 적절하게 낮출 수 있습니다.
배경 포인트 클라우드가 매우 많은 경우 이 파라미터를 적당히 높일 수 있습니다.
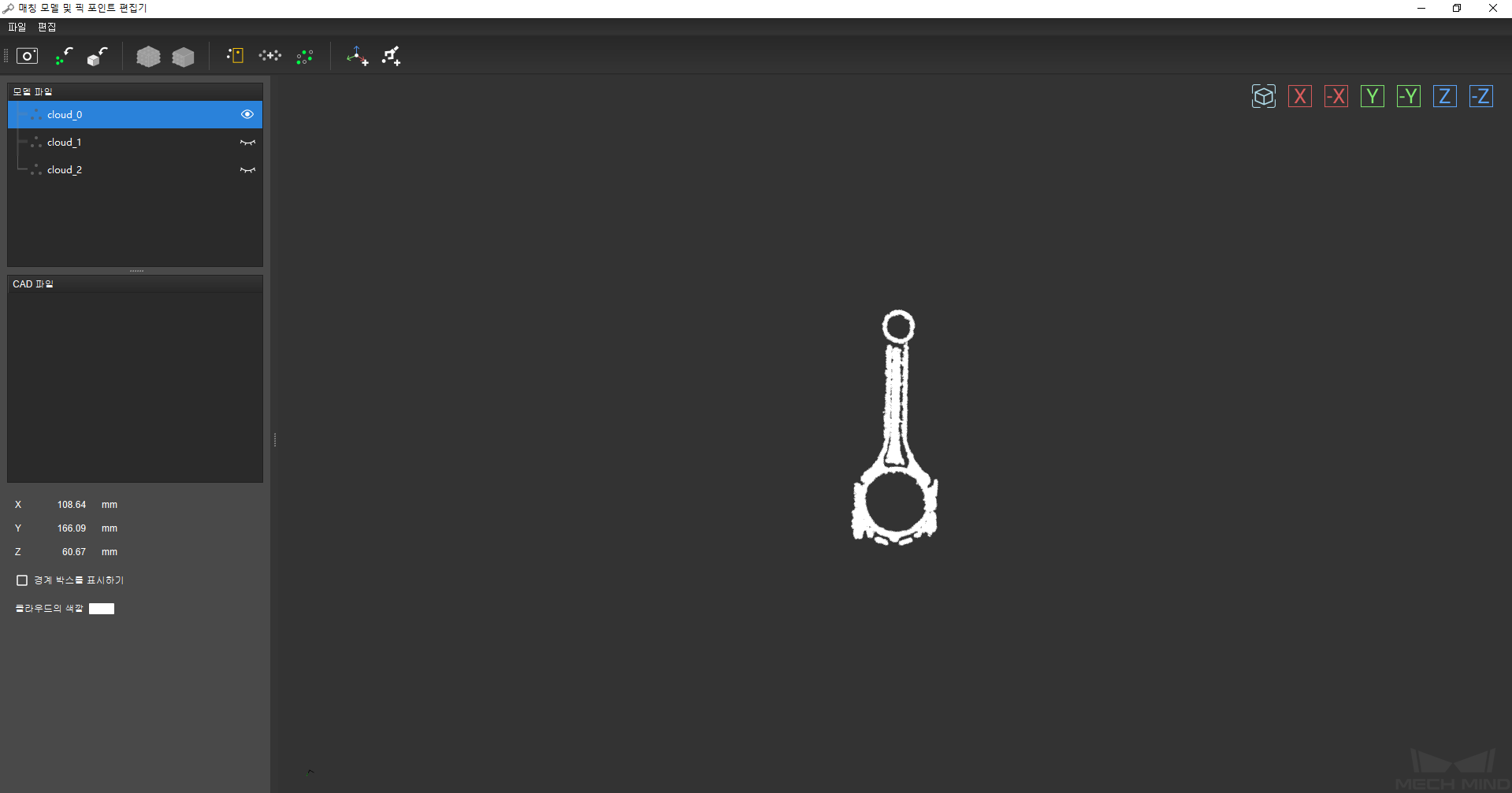
모델을 생성하기 를 클릭하여 시각화 구역 및 왼쪽 모델 파일 리스트에서 생성된 포인트 클라우드 모델을 볼 수 있습니다.
힌트
모델 파일 리스트에 있는 포인트 클라우드 모델 명칭을 클릭하여 다시 명명할 수 있습니다.
조명 변화 등 원인으로 생성된 포인트 클라우드 모델에 불필요한 포인트가 포함될 수도 있습니다. 포인트 클라우드 모델을 편집하기 처리할 때 불필요한 포인트들을 제거할 수 있습니다.
힌트
“티칭을 통해 픽 포인트를 추가하기” 챕터에서 링크를 클릭하여 이 화면으로 들어오신 분은 브라우저의 뒤로 가는 버튼을 사용하여 바로 돌아가여 “티칭을 통해 픽 포인트를 추가하기” 의 남은 내용을 확인할 수 있습니다.
대상 물체가 상대적으로 크고 무거운 상황(예: 자동차 휠을 조립할 때)에서 대상 물체와 배경을 분리해서 캡처하기가 어렵습니다.
티칭 픽 포인트를 추가하지 않으면 한 대상 물체를 카메라 시야 내(상자안에) 놓아두고 티칭 픽 포인트를 추가한 경우 대상 물체의 위치가 변했는지 확인해야 합니다. 변했으면 다시 티칭 픽 포인트를 추가해야 합니다.
툴바에 있는
를 클릭하여 이미지 캡처 창을 엽니다.
대상 물체를 캡처하기 를 클릭하여 모델을 생성하기 를 클릭하여 포인트 클라우드 모델을 생성할 수 있습니다.
가상 카메라¶
가상 카메라를 사용하는 경우 작업 현장에서 이미지를 캡처하지 못하기 때문에 미리 이미지를 준비해야 합니다.
팁
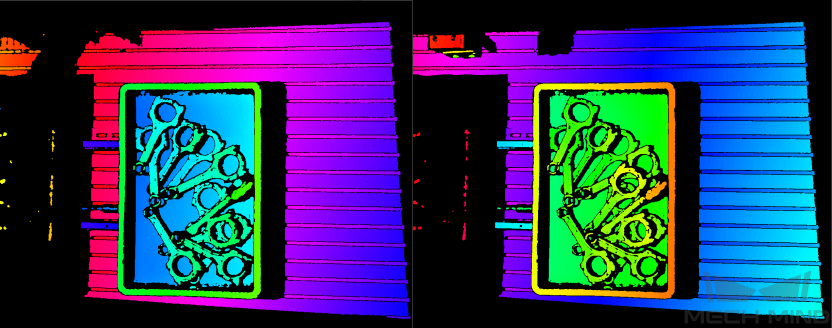
배경 뎁스맵에서 대상 물체가 있어도 되지만 대상 물체의 뎁스맵과 비교하여 한 대상 물체의 차이만 있으면 됩니다. 아래 그림과 같이 왼쪽 그림은 배경 뎁스맵으로 사용되고 오른쪽 그림은 대상 물체의 뎁스맵으로 사용될 수 있습니다.
Mech-Vision의 프로젝트 편집 구역에서 카메라에서 이미지를 캡처하기 스텝을 선택하여 오른쪽 파라미터 표시줄에서 다음과 같이 설정하십시오.
데이터 경로 에서 뎁스맵을 저장하는 폴더의 상위 폴더를 선택해야 합니다. 구체적인 내용은 카메라에서 이미지를 캡처하기 를 참고하십시오.
플레이 모드 를 모두 반복 으로 설정하십시오.
메뉴 바에 있는 를 클릭하여 매칭 모델 및 픽 포인트 편집기 화면으로 들어가고 툴바에 있는
를 클릭하여 이미지 캡처 창을 엽니다.참고
저장된 이미지들은 일반적으로 실제 피킹 작업 현장에서 캡처된 것이기 때문에 n번째 이미지에 있는 대상 물체의 수가 n+1번째 보다 하나 더 많습니다. 따라서 먼저 대상 물체의 뎁스 맵을 읽고 나서 다음 이미지를 배경의 뎁스 맵으로 사용하는 것이 좋습니다.
후속 작업 프로세스는 위에서 언급한 실제 카메라 의 설명과 비슷합니다.캡처 버튼을 클릭할 때마다 순서대로 폴더에 있는 이미지 하나를 읽어낼 것이고 창에서 표시된 뎁스 맵이 요구에 부합할 때까지 계속 이 과정을 반복합니다.
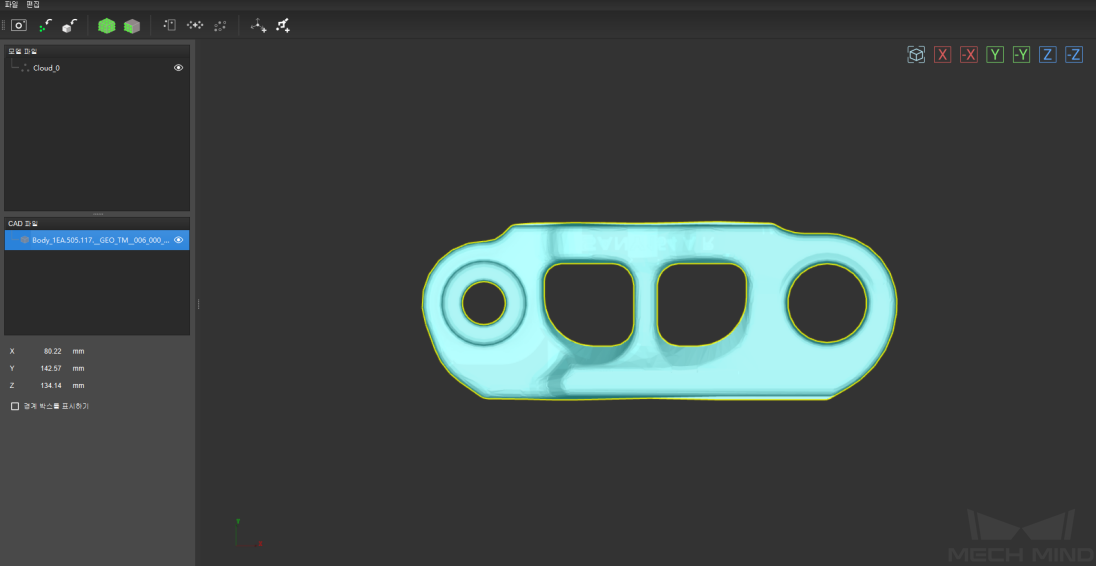
CAD 파일을 도입하여 포인트 클라우드 모델 생성¶
대상 물체의 CAD 모델 파일이 있는 경우 이 파일을 매칭 모델 및 픽 포인트 편집기로 도입하고 나서 이 파일에 의해 포인트 클라우드 모델을 생성합니다.
힌트
아직까지 stl 형식의 CAD 파일만 도입할 수 있습니다.
툴 바에 있는
 를 클릭하고 필요한 CAD 파일을 선택하여“열기”를 클릭하십시오.
를 클릭하고 필요한 CAD 파일을 선택하여“열기”를 클릭하십시오.팝업창에서 모델 유닛을 선택하십시오.
도입한 CAD 파일은 왼쪽 표시줄에 있는 CAD 파일 리스트에 나타날 것입니다.
힌트
한 번에 하나의 CAD 파일만 도입할 수 있으니 여러 개를 도입하려면 스텝1-2를 반복하십시오.
CAD 파일 리스트에서 모델을 생성할 파일을 선택하고 툴 바에 있는
 혹은
혹은  를 클릭하여 포인트 클라우드 모델을 생성할 수 있습니다.
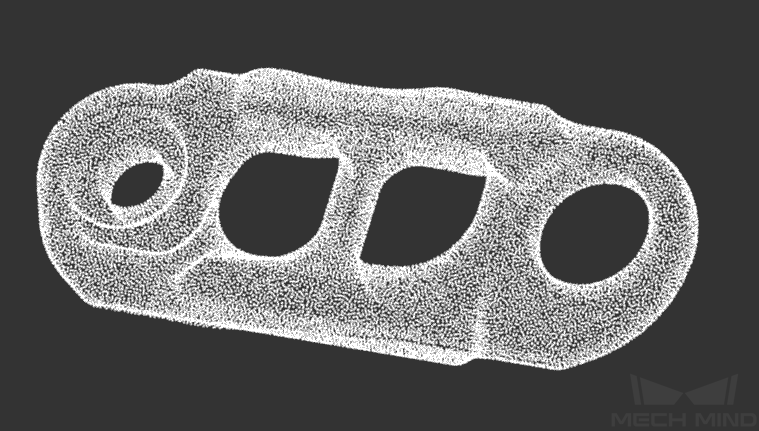
를 클릭하여 포인트 클라우드 모델을 생성할 수 있습니다.- :전체 모델 표면의 포인트 클라우드를 생성합니다.
팝업창에서 포인트 클라우드의 샘플링 간격을 조절하고 확인 을 클릭하여 포인트 클라우드 모델을 생성할 수 있습니다.
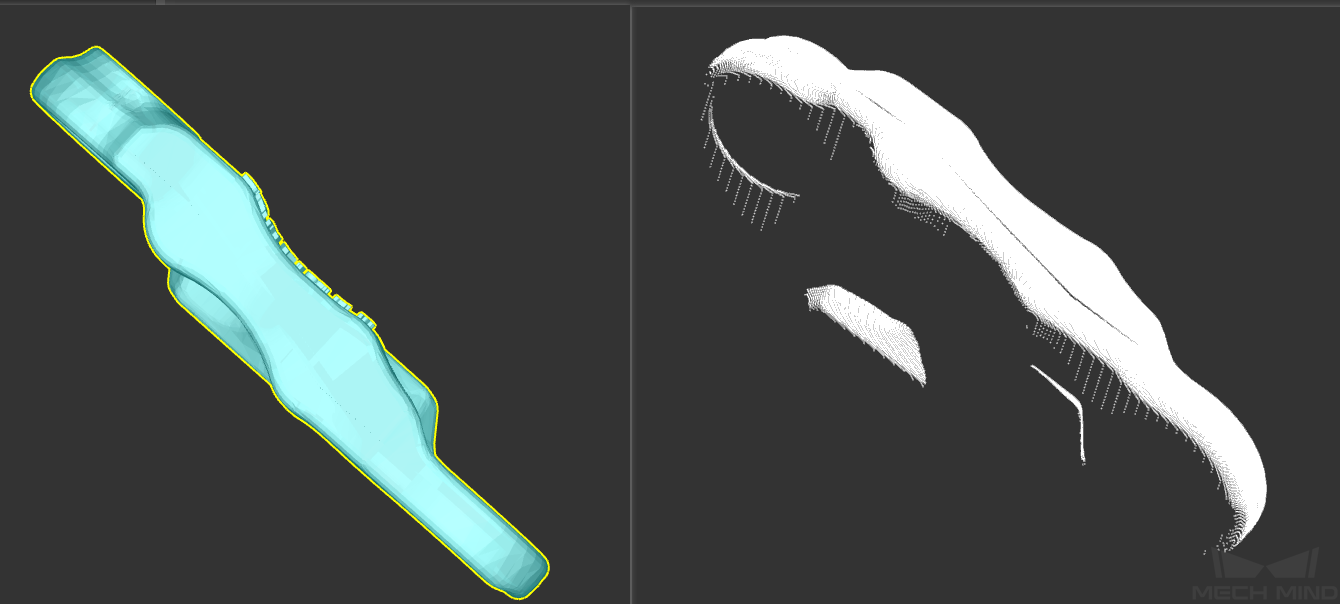
- :현재 시각에 볼 수 있는 포인트 클라우드만 생성합니다.
아래 그림과 같이 왼쪽은 포인트 클라우드를 생성 시의 시각이고 오른쪽은 생성된 포인트 클라우드입니다. 보시다시피 왼쪽 시각의 비시각화 구역은 대응하는 포인트 클라우드를 생성하지 않았습니다.
힌트
포인트 클라우드를 이미 생성한 뒤
및 를 사용하지 못하는 경우가 나타날수도 있습니다.이런 경우에 현재 화면을 클릭하고 선택된 CAD 파일 을 언체크하고 다시 선택하면 아이콘을 다시 사용할 수 있게 됩니다.
힌트
뿐만 아니라 툴 바에 있는 ![]() 를 클릭하여 기존의 ply 형식의 포인트 클라우드 파일을 들여올 수 있습니다.
를 클릭하여 기존의 ply 형식의 포인트 클라우드 파일을 들여올 수 있습니다.
포인트 클라우드 모델을 생성한 다음에 수요에 따라 다음과 같이 처리를 할 수 있습니다.
리스트에 있는 모든 파일을 저장하려면 메뉴 바에 있는 을 클릭하거나 Ctrl+S를 누르십시오.
힌트
파일 저장 경로는 다음과 같습니다. 프로젝트 폴더/resource/model_editor.
포인트 클라우드 모델을 삭제하려면 모델 파일 리스트에서 삭제할 모델을 마우스 오른쪽 키로 클릭하고 팝업창에서 삭제 를 클릭하십시오.
파일을 보지 못하게 하려면 파일 명칭 오른쪽에 있는
 를 클릭하여 시각화 구역에서 해당 파일을 숨길 수 있습니다. 한번더 클릭하면 다시 볼 수 있습니다.
를 클릭하여 시각화 구역에서 해당 파일을 숨길 수 있습니다. 한번더 클릭하면 다시 볼 수 있습니다.경계 박스를 표시하려면 리스트에서 해당 파일을 선택한 다음에 CAD 파일 리스트 아래 경계 박스를 표시하기 를 클릭하십시오.
표시된 포인트 클라우드의 색깔을 바꾸려면 모델 파일 리스트에서 포인트 클라우드 모델을 선택하고 리스트 아래에 포인트 클라우드의 색깔 뒤의 흰색 직사각형을 클릭하여 팝업창에서 포인트 클라우드의 색깔을 바꿀 수 있습니다.
힌트
도입한 컬러 포인트 클라우드의 색깔을 바꿀 수 없습니다.
다음으로 실제 수요를 충족하기 위해 포인트 클라우드 모델에 대해 편집 할 수 있습니다.