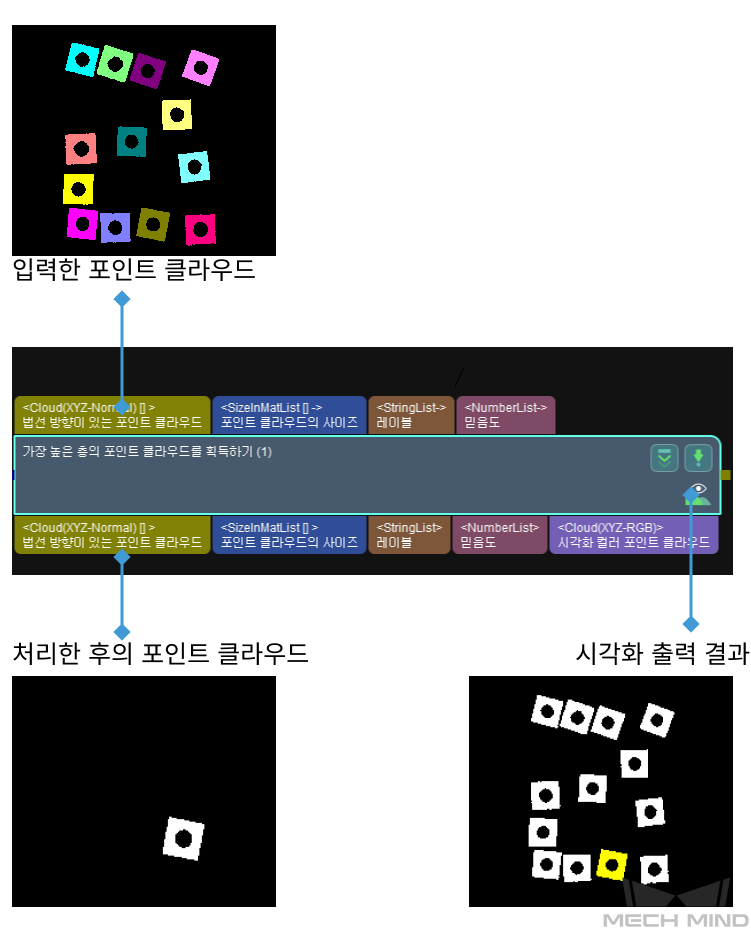
가장 높은 층의 포인트 클라우드를 획득하기¶
응용 시나리오¶
지정한 기준 방향에서 층 높이 범위내에 있는 포인트 클라우드는 유지될 것입니다.이 스텝은 가장 높은 층의 포인트 클라우드를 획득하기 와 달리 직접 포인트 클라우드에 대해 처리하고 일반적으로 포인트 클라우드 클러스터링 、 마스크안에 대응하는 포인트 클라우드를 추출하기 등 스텝 뒤에 사용됩니다.
입력 및 출력¶
파라미터 설명¶
파라미터 |
파라미터 설명 |
|
기준 방향 |
X, Y, Z |
기준 방향의 X , Y , Z 수치를 설정합니다. |
층 설정 |
가장 높은 층의 결과만 출력 |
이 옵션을 선택하면 지정한 방향에 따라 가장 높은 층의 결과만 출력합니다. |
층 높이 |
층마다의 높이를 설정합니다. |
|
층 허용 편차 |
물체와 가장 높은 위치에 있는 물체 간의 거리가 층 높이 * 층 허용 편차보다 작은 경우, 이 물체는 가장 높은 층에 위치하는 것입니다. |
|
포인트 클라우드 설정 |
포인트 수가 가장 많은 법선을 사용하기 |
크기가 가장 큰 포인트 클라우드 법선을 기준 방향으로 사용합니다. |
응용 예시¶
파라미터 조절 설명¶
기준 방향
- X, Y, Z
- 기본값: X = 0. Y = 0. Z = 1.0설명: X, Y, Z의 값을 설치함으로써 기준 방향을 설정합니다.
층 설정
- 가장 높은 층의 결과만 출력
- 기본값: 선택하지 않음설명: 이 옵션을 선택하면 지정한 방향에 따라 가장 높은 위치의 단일한 포인트 클라우드를 획득하고, 반대로 가장 높은 층의 포인트 클라우드를 획득합니다.
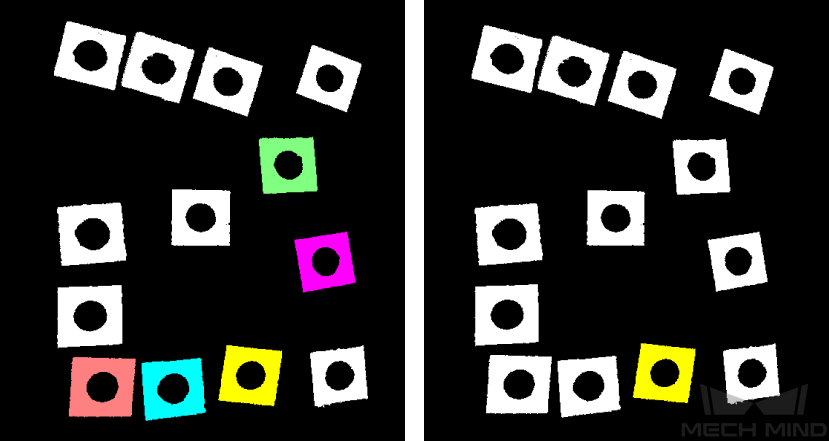
- 층 높이
- 기본값: 0.1설명: 이 파라미터는 층의 높이를 설정하는 데 사용됩니다. 예를 들어 층 높이가 0.1와 0.035로 설정된 경우의 출력 결과가 각각 아래 왼쪽 그림과 오른쪽 그림과 같습니다.
- 층 허용 편차
- 기본값: 1.0설명: 이 파라미터는 가장 높은 층과 나머지 층 사이의 높이 차이 상한을 설정하는 데 사용됩니다. 물체와 가장 높은 위치에 있는 물체 간의 거리가 층 높이 * 층 허용 편차보다 작은 경우, 이 물체는 가장 높은 층에 위치하는 것입니다.
포인트 클라우드 설정
- 포인트 수가 가장 많은 법선을 사용하기
- 기본값: 선택하지 않음설명: 이 옵션을 선택하면 사이즈가 가장 큰 포인트 클라우드의 법선 방향을 기준 방향으로 사용하면 기준 방향 파라미터는 무효가 됩니다.