포인트 클라우드 클러스터링¶
기능 설명
지정된 규칙에 따라 포인트 클라우드 클러스터링하고 보통 대상 물체를 분할하는 데 사용됩니다.

응용 시나리오
일반적으로 포인트 클라우드의 사전 처리 단계에 사용되며 간섭을 줄 수 있는 포인트 클라우드를 제거합니다.
유클리드 거리(EuclideanCluster) 방법과 영역 성장 (RegionGrowingSeg) 방법을 통하여 포인트 클라우드에 대해 클러스터링을 할 수 있습니다.
포인트 클라우드가 공간적으로 서로 분리되는 경우에 전자(EuclideanCluster)를 사용하고, 공간적으로 연속되지만 연결점 위치에서 곡률 변동이 큰 경우에 후자(RegionGrowingSeg)를 사용하는 것을 권장합니다.
입력 및 출력
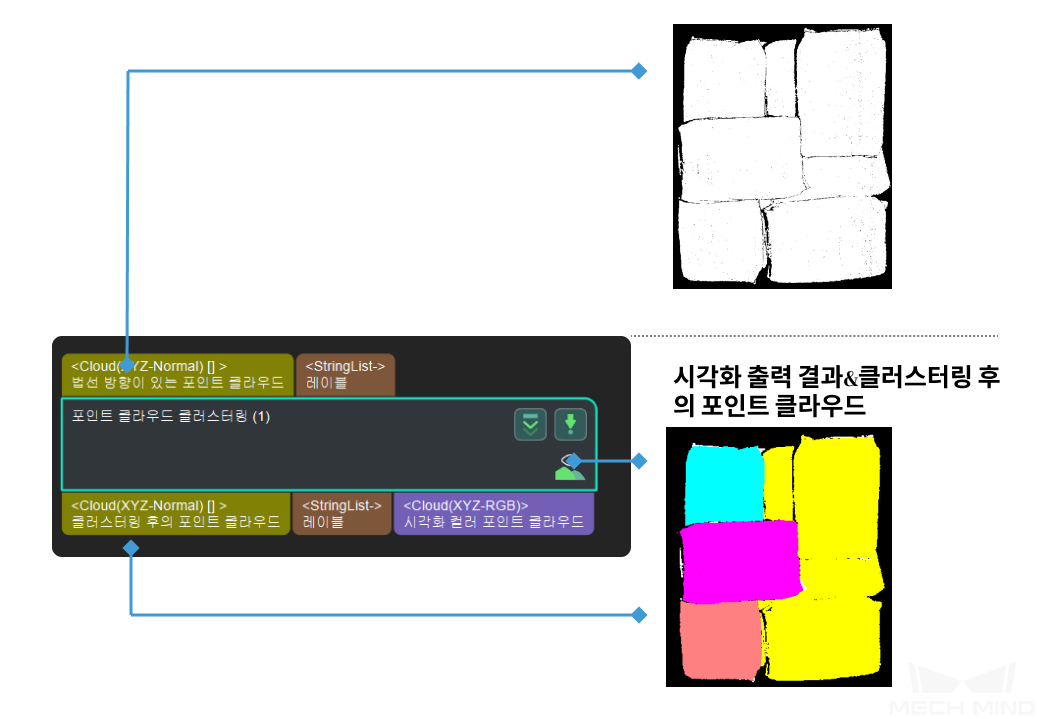
파라미터
클러스터링 알고리즘
기본값:EuclideanCluster값 리스트:EuclideanCluster,RegionGrowingSeg설명:이 파라미터는 클러스터링 알고리즘을 선택하는 데 사용됩니다. 두 가지 알고리즘이 있는데 실제 작업 현장에서 EuclideanCluster 를 사용하는 것을 권장하므로 우선 이 알고리즘을 소개하겠습니다.
EuclideanCluster :거리에 근거하여 같은 클러스터인지 판단합니다.
RegionGrowingSeg :법선 벡터 및 곡률에 근거하여 같은 클러스터인지 판단합니다.
EuclideanCluster
- 출력된 클러스터 중에 인접된 포인트 간의 최대 거리
0.003으로 설정된 경우의 결과이고 오른쪽 이미지는 파라미터 수치가0.005로 설정된 경우의 결과입니다. 조절한 후에 중간에 있는 녹색 포인트 클라우드가 다른 클러스터로 나눠질 것입니다.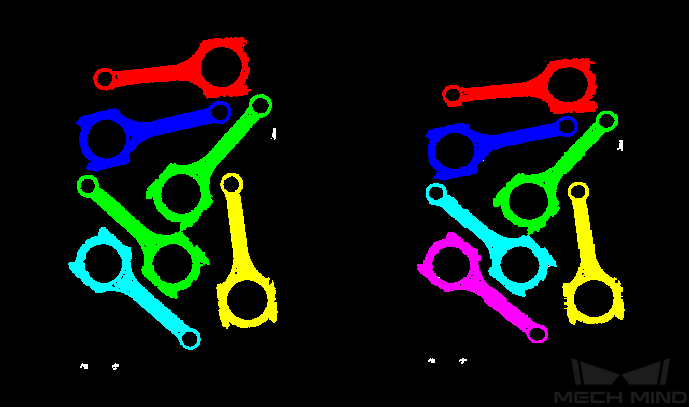
- 병렬 코어 수
RegionGrowingSeg
- 인접된 포인트 수
- 평활도 역치
- 곡률 역치
클러스터 안의 최소 포인트 수
기본값:800설명: 이 파라미터는 클러스터링 뒤의 결과에 대해 필터링할 때 사용됩니다. 클러스터 안의 최소 포인트 수보다 커야 한다는 조건을 충족해야 출력될 것입니다. 이 수치를 높이면 결국 출력된 클러스터의 수가 줄여지게 될 것이며 이 수치를 낮추면 결국 출력된 클러스터의 수가 많아지게 될 것입니다.클러스터 안의 최대 포인트 수
기본값:3000000설명: 이 파라미터는 클러스터링 뒤의 결과에 대해 필터링할 때 사용됩니다. 클러스터 안의 최대 포인트 수보다 작아야 한다는 조건을 충족해야 출력될 것입니다. 이 수치를 높이면 결국에 출력된 클러스터의 수가 많아지고 너무 크게 설정해도 큰 영향이 없습니다. 이 수치를 낮추면 결국 출력된 클러스터의 수가 줄여지게 될 것입니다.예시: 만약 포인트 클라우드 클러스터링이 5가지로 나눠지고 포인트 수가 각각 10000、20000、30000、40000、50000인 경우,최대 포인트 수를 45000으로 설정하고 최소 포인트 수를 15000으로 설정하면 포인트 수가 10000 혹은 50000인 클러스터가 필터링될 것이고 포인트 수가 20000、30000、40000인 클러스터만 출력될 것입니다.GPU 사용
기본값:False값 리스트:True,False설명:이 파라미터는 GPU를 사용하여 계산 속도를 높일지를 결정합니다.