가장 높은 층의 포인트 클라우드를 획득하기¶
설명
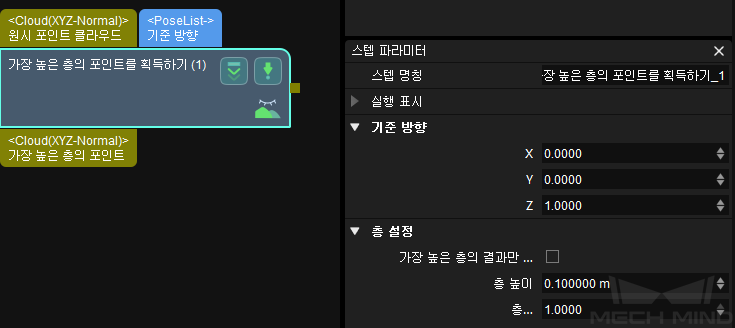
Step 인터페이스 및 속성¶
주어진 기준 방향을 따라 가장 높은 층의 포인트를 획득합니다.
입력 및 출력
- Could(Normal)[]
[입력] 하나의 포인트 클라우드.
- PoseList-
[입력] 포즈 벡터.
- Cloud(Normal)
[출력] 기준 방향을 따라 가장 높은 층의 포인트를 획득합니다.
속성 파라미터
기준 방향(reference direction)
조정 설명: 이 파라미터는 기준 방향을 선택하는 데 사용되며 총 x, y, z의 세 방향을 포함합니다.기본값: x=0;y=0;z=1.0권장 값: 실제 상황에 따라 설정합니다.층 속성(Layer property)
가장 높은 포인트만 획득하기(onlyGetHighestOne)
조정 설명: 이 파라미터는 포인트 클라우드에서 가장 높은 층의 포인트만 획득할 것인지를 결정합니다.기본값: False권장 값: 실제 상황에 따라 설정합니다.값 리스트:True,False층 높이(LayerHeight)
조정 설명: 이 파라미터는 층의 높이를 설정하는 데 사용되며 단위는 m입니다.기본값: 0.1권장 값: 실제 상황에 따라 설정합니다.층 허용 오차(layerDiffTolerance)
조정 설명: 이 파라미터는 가장 높은 층과 나머지 층 간의 높이 차이의 상한을 설정하는 데 사용되며, 이는 층 높이(LayerHeight)에 층 허용 오차(layerDiffTolerance)를 곱한 것과 같습니다. 어느 층과 가장 높은 층의 높이차가 이 값보다 작으면 이 층은 가장 높은 층에 속합니다.기본값: 1.0권장 값: 실제 상황에 따라 설정합니다.입력한 포즈의 Z 방향 사용(useInputPoseZdir)
조정 설명: 이 파라미터는 입력한 포즈의 Z 방향을 기준 방향으로 사용할 것인지를 결정하는 데 사용되며 이 파라미터가 "True"로 설정되면 "기준 방향" 파라미터는 무효입니다.기본값: False권장 값: 실제 상황에 따라 설정합니다.값 리스트:True,False