ティーチングによる把持位置姿勢設定¶
把持位置姿勢設定の使用シーン(ティーチング方法)¶
高精度が求められ、把持位置姿勢精度が0.5mm以内のシーン。
TCP位置姿勢を精確に測定できないシーン。
供給されるワークの姿勢が似ています。ワークの姿勢がばらばらな場合、ティーチング方法を使用して複数のモデルを作成する必要があります。
ティーチングによる把持位置姿勢設定の操作流れ¶
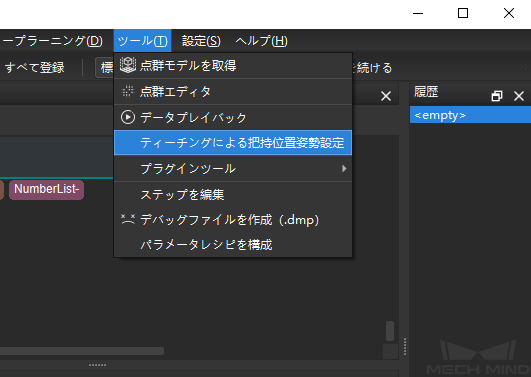
Mech-Visionを起動、「ツールキット」->「ティーチングによる把持位置姿勢設定」をクリックする¶
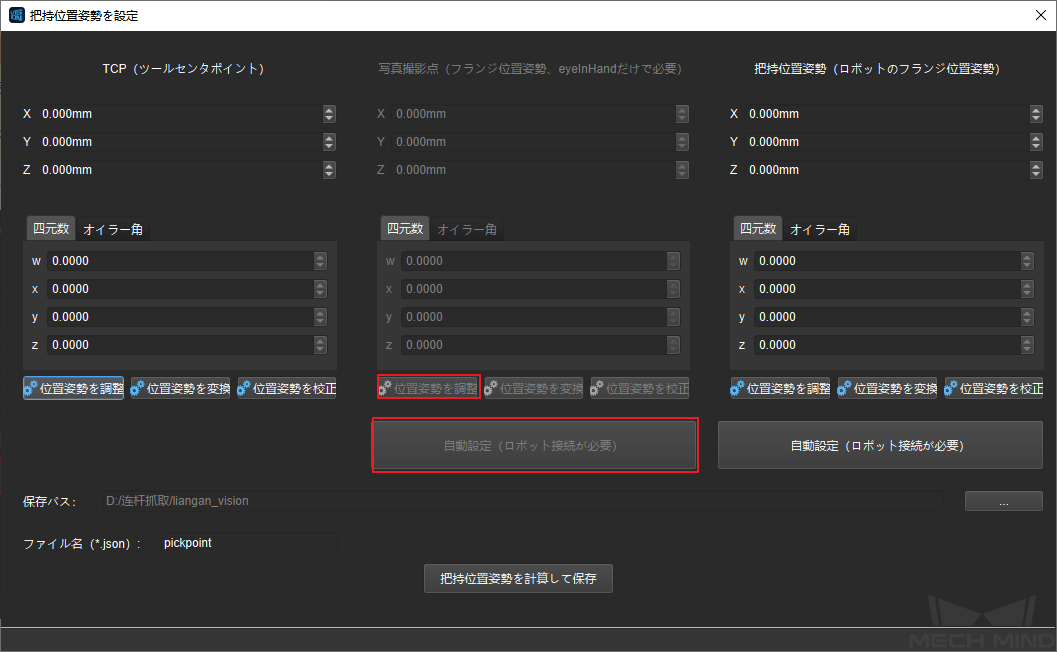
写真撮影点の設定(Eye in Hand方法では必要、Eye to Hand方法では不要)¶
写真撮影点を自動設定:ロボットに接続し、ロボットを写真撮影点に移動します。 写真撮影点を設定 をクリックして、ロボットフランジの座標を写真撮影点として自動的に取得します。
写真撮影点を手動設定:ロボットに接続し、ロボットを写真撮影点に移動します。手動でフランジ中心の位置姿勢を写真撮影点として入力します。
注意
手動で写真撮影点入力に設定した場合、後続の把持位置姿勢も手動で入力しなければなりません。
必ずフランジ中央の位置姿勢を入力してください。TCPを入力しないでください。
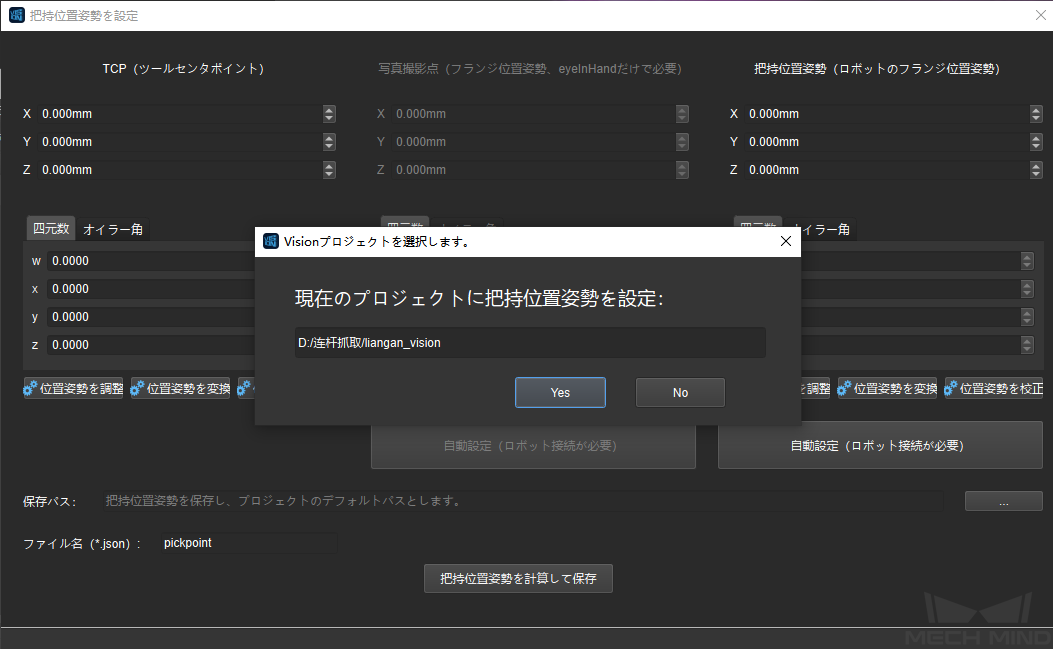
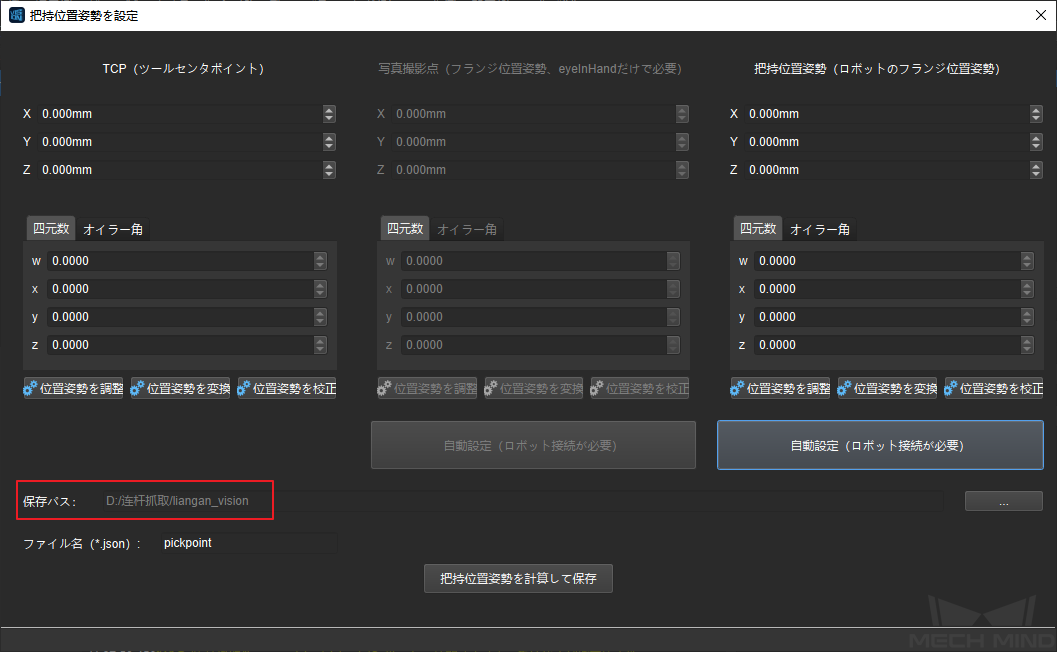
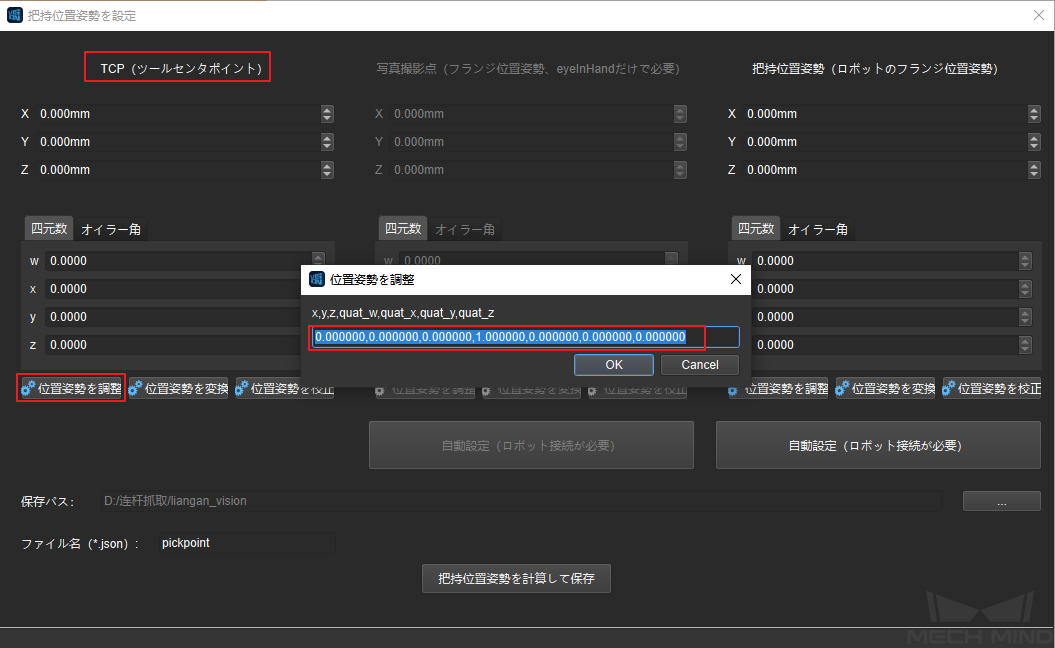
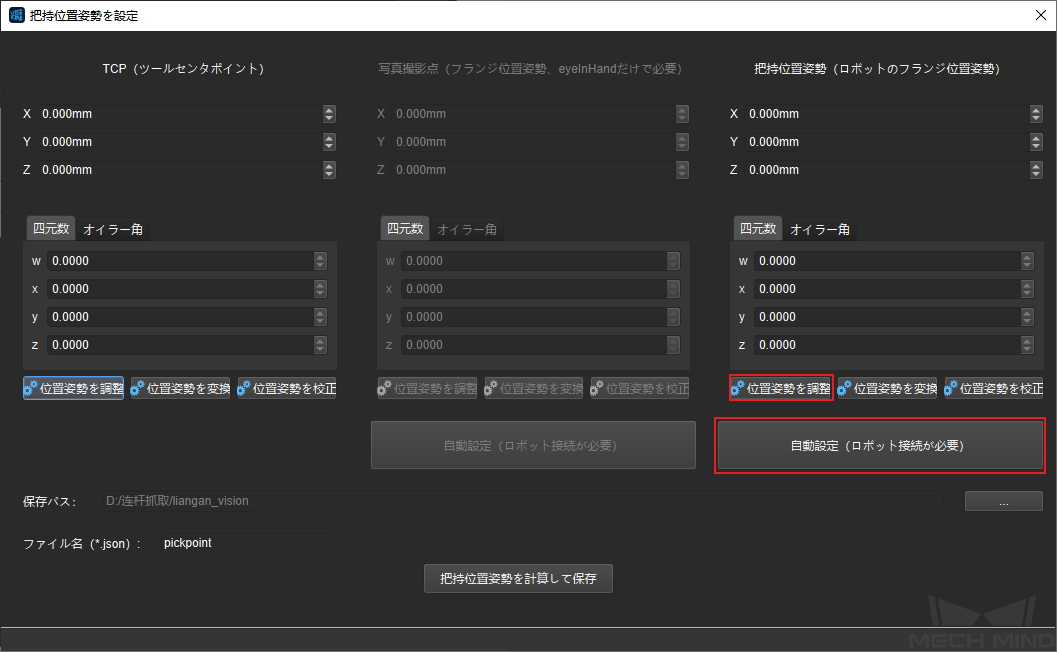
把持位置姿勢の設定¶
把持位置姿勢を自動設定:ロボットに接続し、ロボットを把持位置姿勢に移動させます。 対象物を把持させ、把持位置姿勢を設定 をクリックします。
把持位置姿勢を手動設定:ロボットに接続し、ロボットを把持位置姿勢に移動させます。対象物を把持させ、ロボットフランジ中心の位置姿勢を手動で入力します。
注意
把持位置姿勢と写真撮影点が同じ座標系にあるように、グリッパーが把持位置姿勢で対象物を把持・配置する前後に、対象物の位置姿勢が変わらないようにしなければなりません。対象物を繰り返し把持・配置し、対象物が安定した後で把持位置姿勢を設定します。
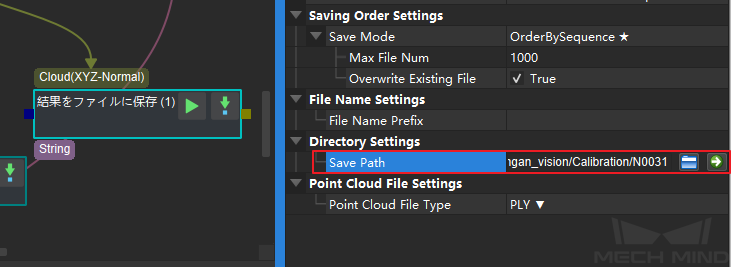
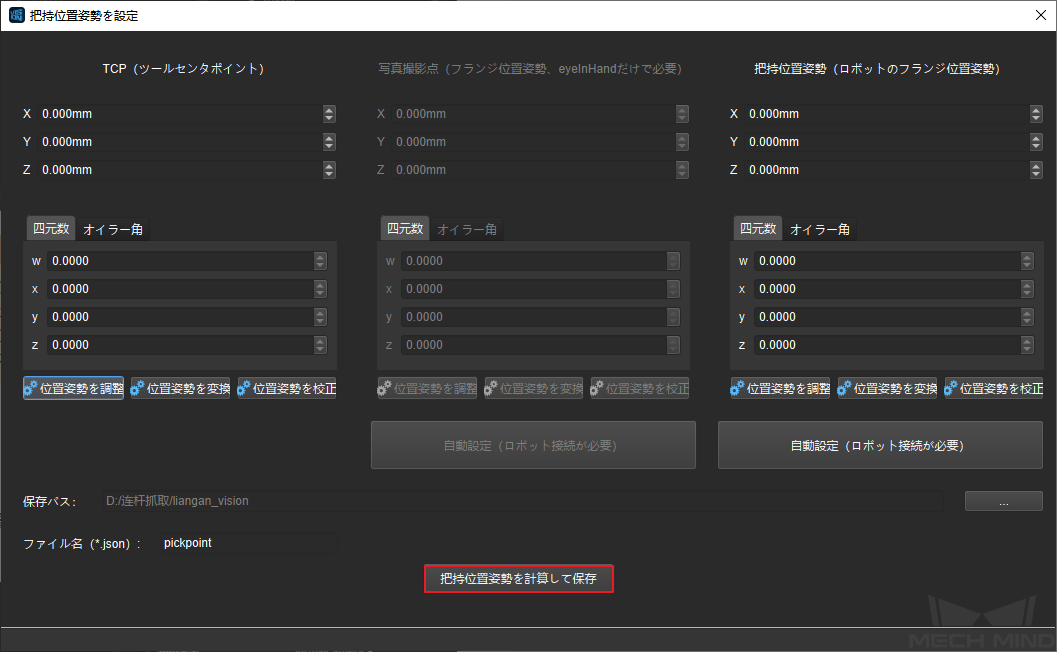
「把持位置姿勢を計算して保存」をクリック(把持位置姿勢は、設定された保存パスに保存されます)¶
注意
対象物の寸法が大きくて、認識するには2台のカメラを使用して画像を生成する必要がある場合、2つのステップを同時に使用できます。一番目のステップは「カメラから画像を取得(サブカメラ)」で、二番目のステップは「カメラから画像を取得(メインカメラ)」です。上記の把持位置姿勢設定流れを実行する前に、Mech-Visionプロジェクト全体を実行する必要があることにご注意ください。
把持位置姿勢の設定が正確かどうかを検証する¶
方法一(推奨)¶
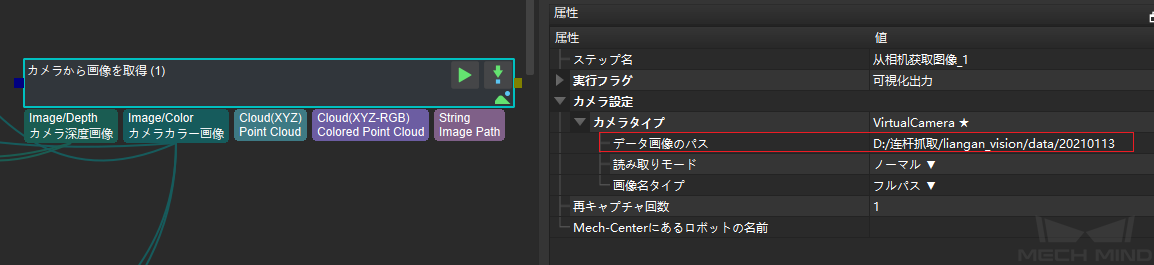
モデルを作成するためのカラー画像と深度画像を、カメラから画像を取得するための入力データとして使用します。
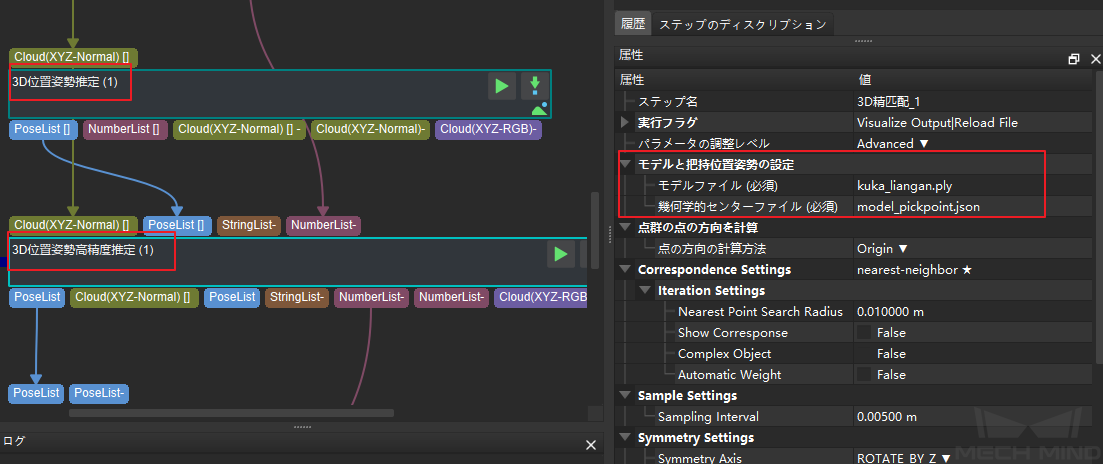
作成されたモデルと設定された把持位置姿勢を3D位置姿勢低精度推定と3D位置姿勢高精度推定のステップに入力します。
Mech-Visionプロジェクトでステップ「位置姿勢を変換」を実行した後、ステップ「把持位置姿勢を検証」を追加して実行すれば、モデルとシーン点群のマッチングが実行される検証環境を実現します。
注意
このプロセスでは、対象物が移動しないようにしてください。
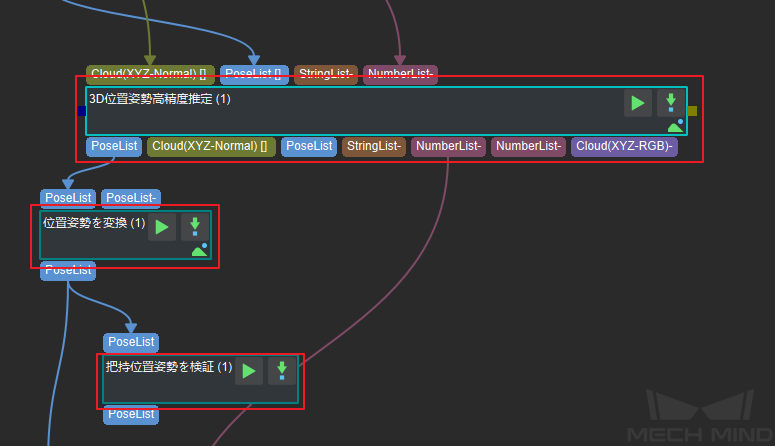
ステップ「把持位置姿勢を検証」に出力される位置姿勢は、ユーザーが設定した把持位置姿勢とMech-Visionプロジェクトに出力される把持位置姿勢の違いを意味します。実行時にTextOutputをTrueに調整し、Text出力を確認します。下図に示すように、最終的に把持位置姿勢のY方向の差は1.4mmで、大きい誤差となっています。

注意
3D位置姿勢高精度推定 の誤差が非常に小さく抑えなければなりません。そうしなければ、把持位置姿勢の検証ステップの出力誤差がマッチングと把持位置姿勢の二重誤差になります。
方法二¶
新しく作成したモデルと把持位置姿勢を読み込み、Mech-Visionで対応するプロジェクトを実行します。Mech-Vizを使用してロボットアームを制御し、キャリブレーションに使用した対象物を把持させます。対象物を正確に把持できた場合、把持位置姿勢の設定が正しいことになります。
注意
把持位置姿勢の設定に問題があれば、偶発的な衝突が発生する可能性があります。この方法を使用すれば、ロボットアームを慎重に操作してください。