3. Configure Scene Object Models¶
With models of scene objects added, scene objects can be taken into consideration during collision detection, affecting the planning of path and picking strategy for the robot. These models are also displayed in the 3D simulation area, reproducing the actual scene more realistically.
In the Scene tab, you can create simple models directly with Create Model, or import already made models with Load Model.
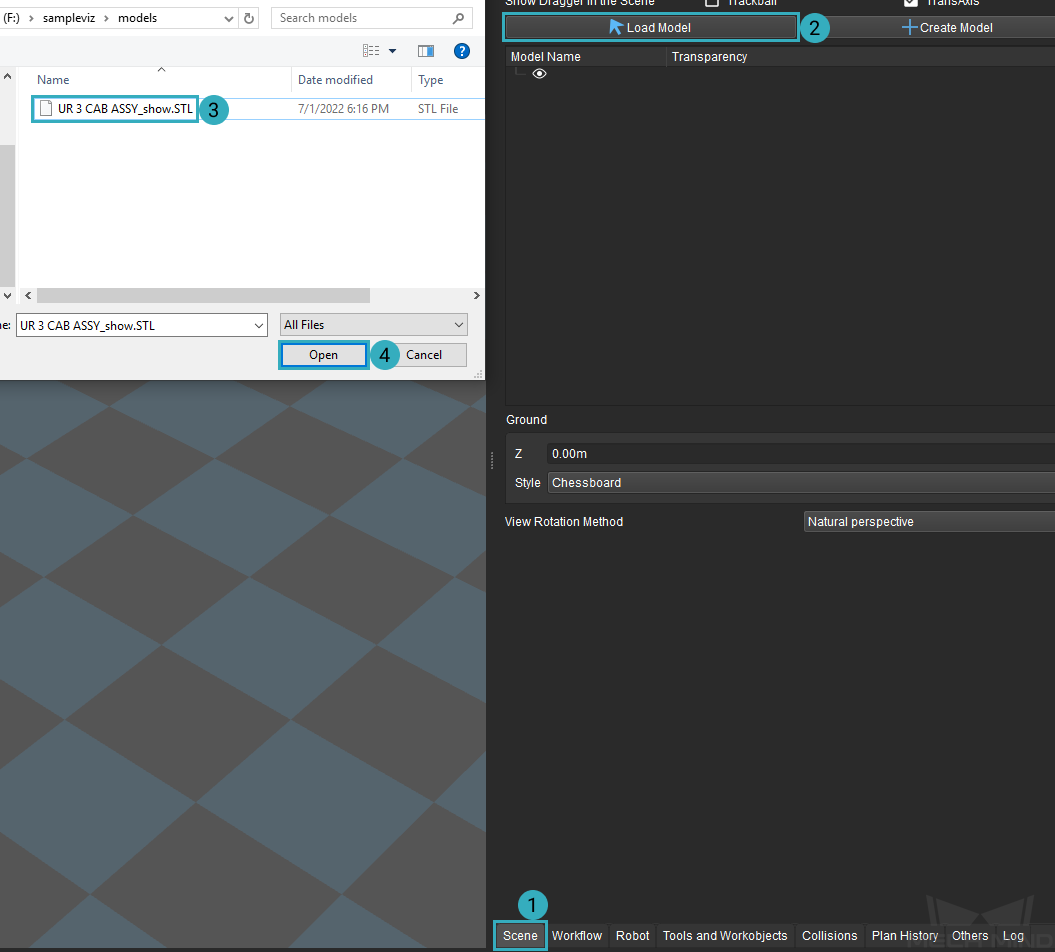
In the example project, you can import a ready-made model from \sampleviz\models.
Click on the Scene tab in the lower right.
Click on Load Model at the top of the tab.
Select the UR 3 CAB ASSY_show STL file from the above location.
Click on Open.
Hint
If the position of the added model is incorrect, you can adjust it by the following methods:
Double-click on the model name and change the position and/or rotation values in the pop-up window.
Check the Trackball and/or TransAxis options at the top of the Scene tab to display the translation/rotation manipulators of the model. Hold down Ctrl and click on a manipulator to drag it.
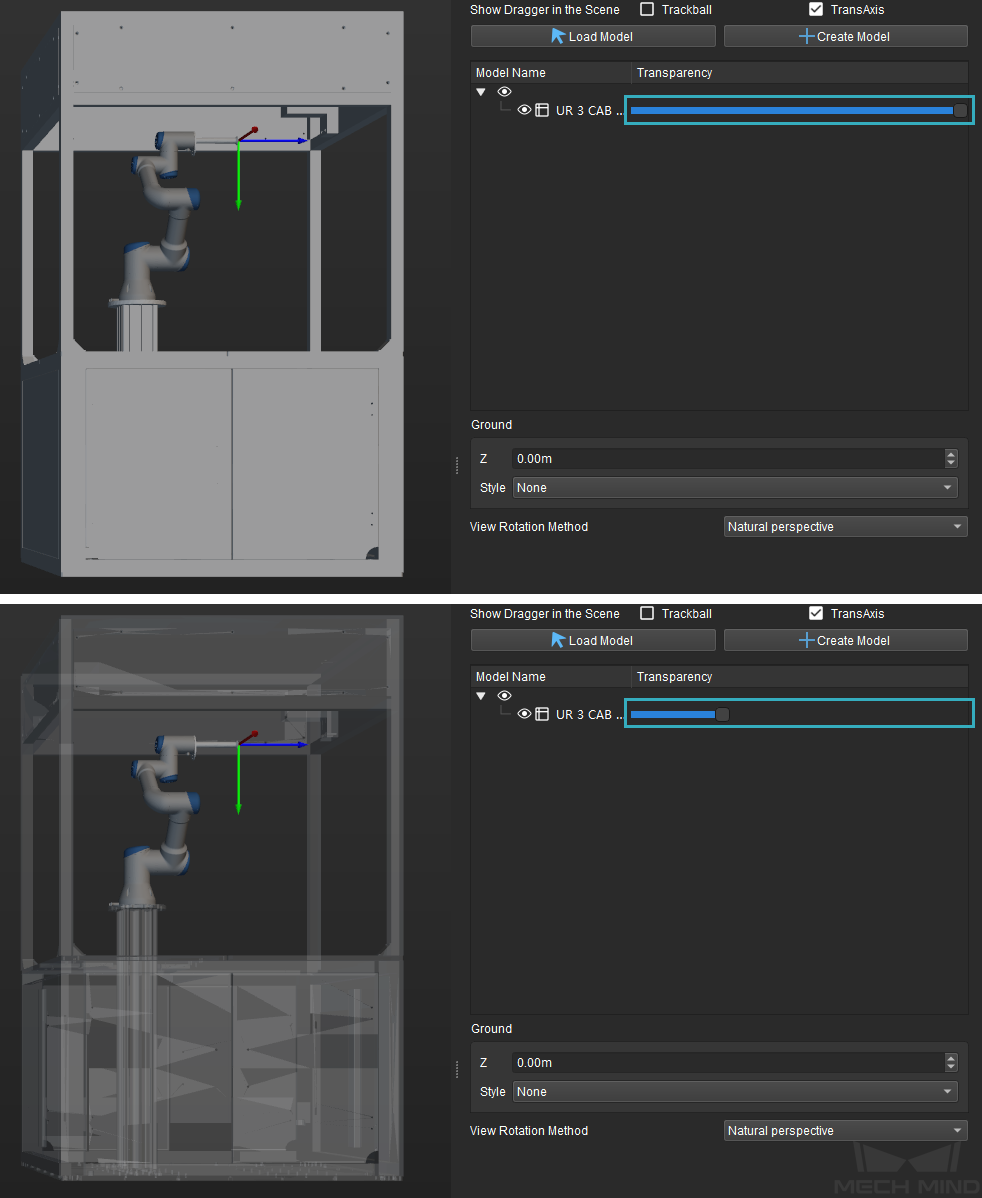
Scene object models might block your view of the planned path, poses, other objects, etc., in the 3D simulation area.
In such cases, you can adjust the opacity of the model by the slide bar to the right of the model name.